

4. Измерение времени т1
Импульсные методы ЯМР дают наиболее универсальный способ измерения времен Т1 в широком диапазоне значений. Наиболее широко применяемый способ – так называемая импульсная последовательность 180° – – 90° (где – промежуток времени, между соседними импульсами) – показан на рис. 5.
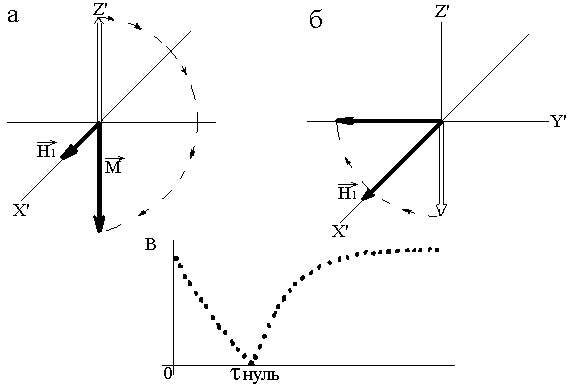
Рис. 5. Измерение Т1 с помощью импульсной последовательности 180° – – 90°
Сначала
180°-ный импульс инвертирует намагниченность
вдоль оси
.
Далее происходит продольная релаксация,
под действием которой MZ’
изменяется от значения –М0,
проходит
через нуль и стремится к своему
равновесному значению М0.
Если через время
после 180°-ного импульса к системе
приложить 90°-ный импульс, также
направленный по оси
,
то вектор
намагниченности
![]() повернется и окажется направленным по
оси
.
повернется и окажется направленным по
оси
.
В результате будет наблюдаться сигнал свободной индукции, начальная амплитуда которого пропорциональна величине и, следовательно, величине MZ’ в момент времени . Если теперь позволить системе вернуться к равновесию, для чего необходимо выждать, по крайней мере, время 5Т1 (при 5Т1 MZ’ = 0,993М0), и снова воздействовать на нее последовательностью импульсов 180° – – 90°, но с другим значением , то можно найти скорость восстановления MZ’. Количественно восстановление MZ’ описывается уравнением Блоха:
![]() , (8)
, (8)
Интегрирование уравнения (8) с начальным условием MZ’ = –М0 при t =0 дает:
 , (9)
, (9)
В эксперименте регистрируется абсолютное значение М:
![]() , (10)
, (10)
Это и есть функция, построенная на рисунке 5в. На практике выражение (10) используется в преобразованном виде
 , (11)
, (11)
где A – начальная амплитуда индуцированного сигнала после 90°-ного импульса, приложенного в момент , а A∞ – предельное значение A при очень длительном интервале между 180°-ным 90°-ным импульсами.
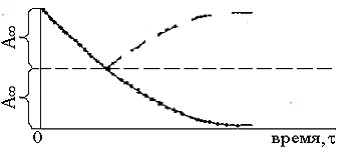
Рис.
6. Зависимость

На
рисунке 6 приведена зависимость

Если переписать уравнение (11) в виде:
 ,
(12)
,
(12)
то
по наклону графика зависимости
 от
можно определить Т1.
от
можно определить Т1.
Из выражения (12) можно видеть, что при 0= Т1ln2≈ 0,69Т1 A=0. Поэтому Т1 можно определить по временному промежутку между импульсами, при котором 90°-ный импульс не сопровождается сигналом свободной индукции. Этот способ полезен для грубой оценки Т1, но не годится для точных измерений.
Если Т1 >> Т2* , то Т1 можно определить также с помощью импульсной последовательности 90° – – 90° . В этом случае сигнал свободной индукции после первого 90°-ного импульса спадает до нуля значительно быстрее, чем MZ достигает своего равновесного значения. Поэтому второй 90°-ный импульс позволяет определить значение MZ в момент как и с помощью последовательности 180° – –90°. График зависимости ln (A∞ _ A) от снова является прямой линией, по наклону которой можно найти время Т1.
5. Измерение времени т2 методом спинового эхо
В
случаях, когда не выполняется условие
 ,
вклад неоднородности поля H0
в скорость спада индуцированного сигнала
не позволяет использовать это время
спада Т2
как меру Т2.
В этих случаях пользуется методом
спинового эхо. Метод состоит в том, что
на спиновую систему воздействуют
импульсной последовательностью 90° –
– 180° и в момент времени 2
наблюдают эхо-сигнал. На рис. 7,
поясняющем сущность этого метода,
показано поведение вектора намагниченности
во вращающейся системе.
,
вклад неоднородности поля H0
в скорость спада индуцированного сигнала
не позволяет использовать это время
спада Т2
как меру Т2.
В этих случаях пользуется методом
спинового эхо. Метод состоит в том, что
на спиновую систему воздействуют
импульсной последовательностью 90° –
– 180° и в момент времени 2
наблюдают эхо-сигнал. На рис. 7,
поясняющем сущность этого метода,
показано поведение вектора намагниченности
во вращающейся системе.

Рис. 7. Образование сигнала спинового эха при воздействии 900-и 1800-ых импульсов
На
рис. 7а показан поворот вектора
намагниченности
на 90° при включении поля
вдоль положительного направления
оси
.
Полную намагниченность
можно представить, как векторную сумму
отдельных макроскопических намагниченностей
![]() ,
обусловленные
ядрами, находящимися в разных частях
образца и поэтому испытывающими
воздействие внешнего поля несколько
различной величины. Вследствие этого
имеется целый набор частот прецессии
при средней величине 0,
которую мы приняли за частоту вращения
системы координат.
,
обусловленные
ядрами, находящимися в разных частях
образца и поэтому испытывающими
воздействие внешнего поля несколько
различной величины. Вследствие этого
имеется целый набор частот прецессии
при средней величине 0,
которую мы приняли за частоту вращения
системы координат.
На рис. 7б начинают расходиться в веер, поскольку некоторые ядра прецессируют быстрее, а некоторые – медленнее, чем система координат. В момент времени после 90°-ного импульса к спин-системе прикладывается 180°-ный импульс, также в направлении оси (рис. 7в). Под действием этого импульса каждый из векторов поворачивается на 180° вокруг оси . В результате, , которые движутся быстрее, чем система координат (на рис. 7б они изображены движущимися к наблюдателю, или по часовой стрелке, если смотреть со стороны ), будут, естественно, продолжать двигаться быстрее, но на рис. 7г это движение направлено от наблюдателя.
В момент времени 2 все оказываются совпадающими по фазе и направленными вдоль отрицательной оси , как показано на рис. 7д. На рис. 7е видно, что продолжающееся движение заставляет их снова разойтись и потерять фазовую когерентность. Принудительная фазировка вызывает нарастание сигнала свободной индукции до максимума в момент времени 2 (рис. 7ж). Если бы поперечной релаксации не было, то амплитуда эхо бала бы такой же, как начальное значение сигнала свободной индукции после 90°-ного импульса. Однако все спадают в течение времени 2 вследствие естественных процессов, обуславливающих поперечную релаксацию, с характеристическим временем Т2. Поэтому амплитуда эхо зависит от Т2. Следовательно, Т2 можно определить из зависимости амплитуды эхо от . Как и при измерении Т2, для каждого значения необходимо прилагать к образцу новую последовательность импульсов, а между ними выжидать время, достаточное для восстановления равновесия (не менее 5Т1). Результат такого эксперимента показан на рис. 8.
Амплитуда эхо в момент времени t = 2 при промежутке между импульсами пропорциональна выражению:
 , (13)
, (13)
Огибающая сигналов индукции после 90°-ного импульса и сигналов эхо описывает спад поперечной намагниченности:
 , (14)
, (14)
Из наклона графика lnA от t легко определить время Т2.

Рис. 8. Результат эксперимента по спиновому эхо: а, б, в – результат воздействия 90°- - 180° последовательности импульсов с различными значениями; г – объединенная картина.