

3. Реализация корректирующего устройства и исследование реализованной системы автоматического регулирования скорости электропривода
3.1 Реализация корректирующего устройства
Передаточная функция корректирующего устройства имеет вид:
 ,
,
![]() .
.
Разобьем
![]() на элементарные звенья с учетом изменения
частоты от ωmin
до ωmax:
на элементарные звенья с учетом изменения
частоты от ωmin
до ωmax:
![]() .
.
Расчет цепей коррекции:
1 звено:
![]()
Для расчета и реализации данного корректирующего устройства выберем схему (рис. 3.1).
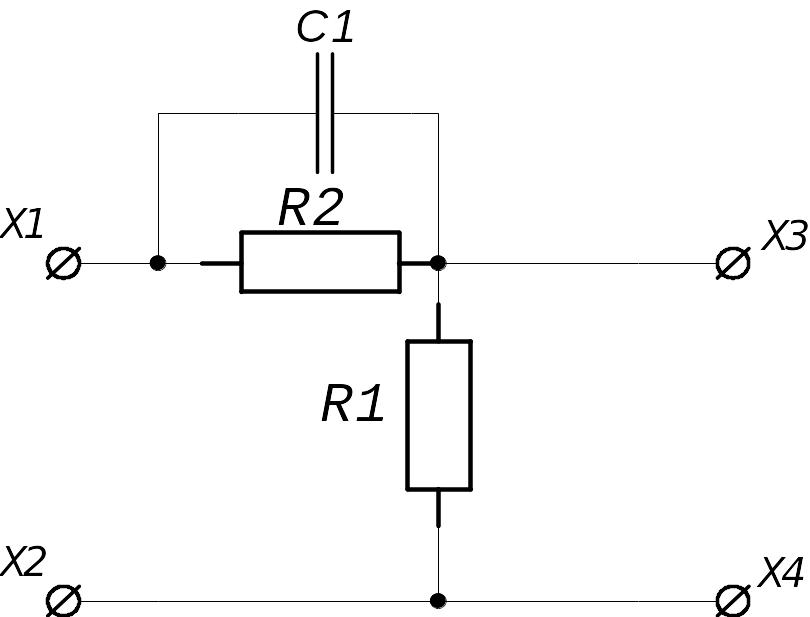
Рисунок 3.1 – Цепь коррекции
Примем
резистор R21
МЛТ-0.125 – 2.2 МОм![]() 5
% (ряд Е 24), тогда емкость конденсатора
составит
5
% (ряд Е 24), тогда емкость конденсатора
составит
![]() (Ф)
(Ф)
выбираем конденсатор К52-7А емкостью С11 = 9.1 нФ на рабочее напряжение 400В.
Произведем пересчет постоянной времени T1КУ:
![]() (с).
(с).
Рассчитаем сопротивление резистора R11:
 (Ом)
(Ом)
выбираем резистор R11 МЛТ-0.125 – 2.2 МОм 5 % (ряд Е 24).
Произведем пересчет постоянной времени T2КУ:
 (с)
(с)
В результате получим реальное корректирующее устройство передаточная функция, которого имеет вид:
![]() ,
(3.3)
,
(3.3)
![]() .
.
3.2 Временной анализ реализованной сар
Составим и исследуем модель скорректированной системы автоматического регулирования:
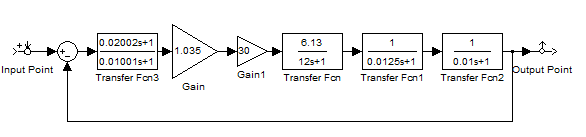
На рисунке 3.1 представлена имитационная модель временного анализа скорректированной системы автоматического регулирования.
|
Рисунок 3.2 – Имитационная модель временного анализа скорректированной системы |
Результаты моделирования скорректированной системы автоматического регулирования представлены на рисунке 3.3
|
Рисунок 3.3 График переходного процесса скорректированной системы |
|
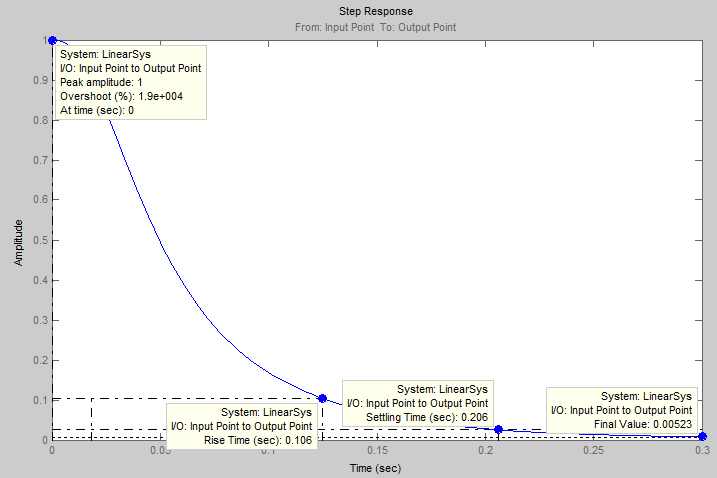
Рисунок 3.4 Статическая ошибка скорректированной системы (сигнал рассогласования) |
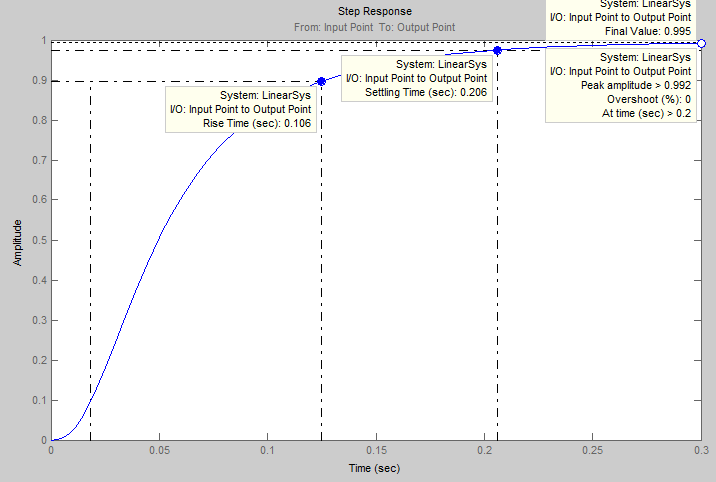
Временные показатели качества:
перерегулирование – σмод = 0% в соответствии с рисуноком 3.4;
время достижения 1 –го максимума: tуmaxмод = 0 (с);
время нарастания: tнмод = 0.106 (с);
время регулирования: tpмод = 0.206 (с);
установившееся значение: hумод = 0.992;
время установившегося значения: tумод=0.3 (с);
показатель точности регулирования - статическая ошибка скорректированной системы: εмод = 0.00523;
количество максимумов за время регулирования: n = 0.
3.3 Частотный анализ разомкнутой скорректированной системы автоматического регулирования скорости электропривода
Модель частотного анализа системы автоматического регулирования приведена на рисунке 3.5.
|
Рисунок 3.5 Имитационная модель частотного анализа скорректированной разомкнутой системы |

Результаты моделирования скорректированной разомкнутой системы автоматического регулирования представлены на рисунке 3.5, 3.6.
|
Рисунок 3.6 АЧХ и ФЧХ скорректированной разомкнутой системы |
|
Рисунок 3.7 Амплитуднофазочастотная характеристика (АФЧХ) скорректированной разомкнутой системы. |
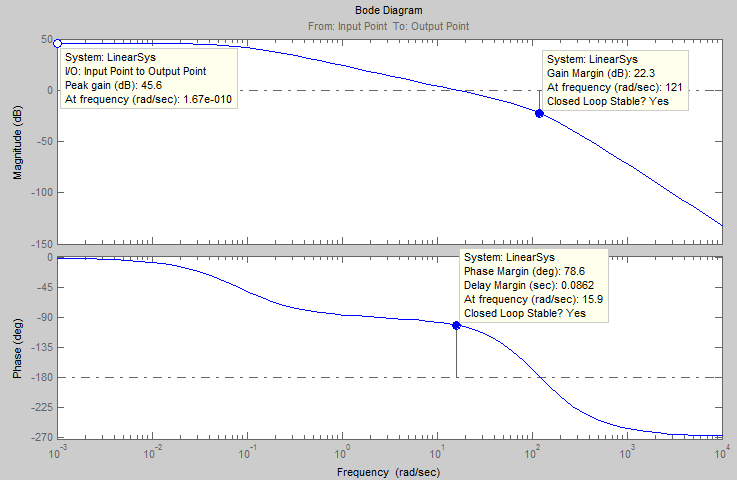
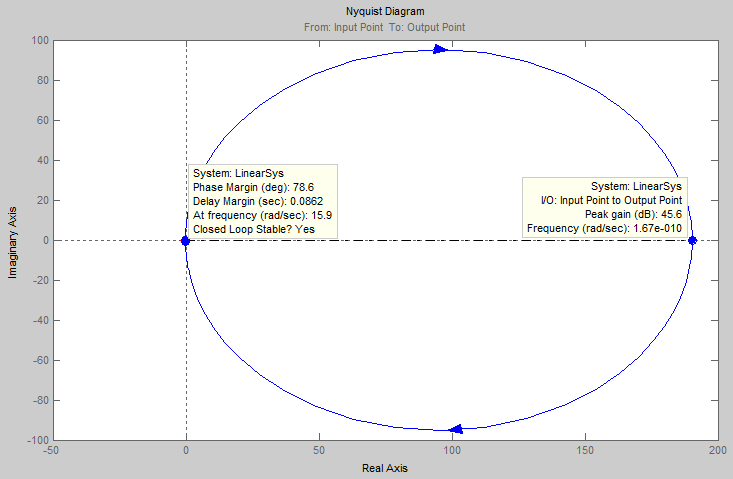
Частотные показатели качества разомкнутой системы автоматического регулирования:
Запас устойчивости по амплитуде / Hm /мод= 22.3 (дБ);
Частота среза ωср мод =15.9 (с–1);
Запас устойчивости по фазе Δмод(ωср) = 78.6°;
Частота ωπ мод =121 (с– 1);