

Механизмы движения с остановами
В автоматически и полуавтоматически действующих машинах встречается необходимость периодически сообщать движение ведомым звеньям с последующей полной остановкой, время которой может быть заданным. В этом случае используют храповые и мальтийские механизмы.
Мальтийский механизм (рис. 2.18) преобразует непрерывное вращение входного звена – кривошипа 1 – в прерывистое (с остановами) вращение выходного звена – креста 2. Механизм имеет стойку 3 и высшую пару, образованную цевкой B кривошипа и пазом колеса.
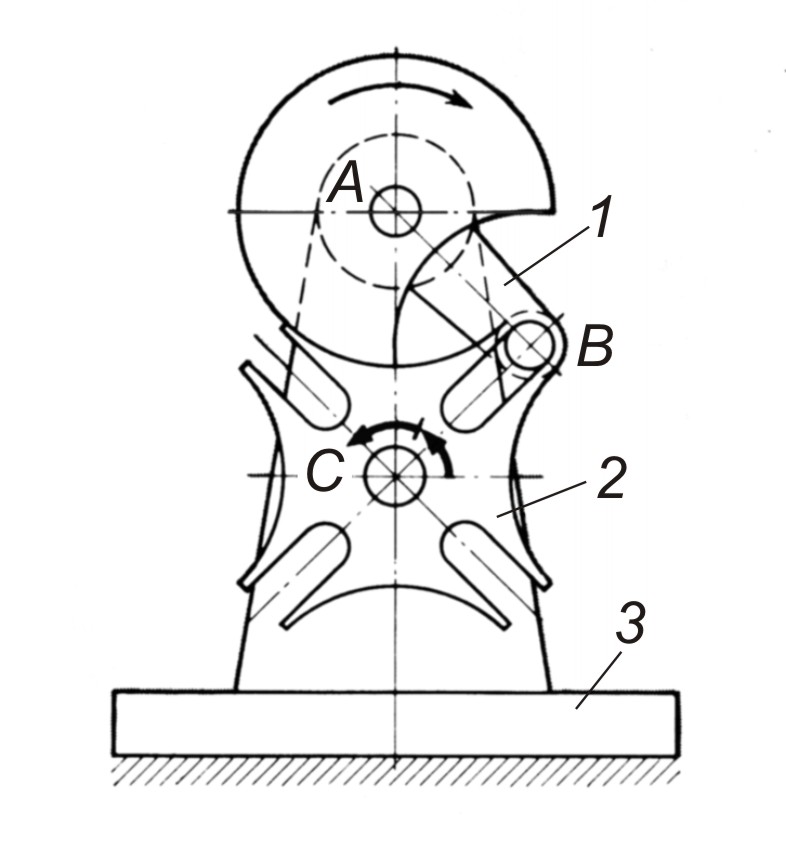
Рис. 2.18. Мальтийский механизм
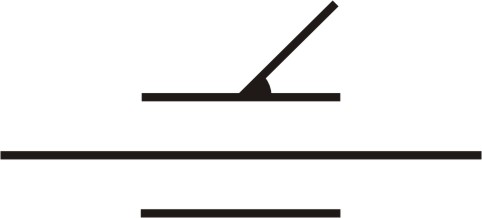
Храповой механизм (рис. 2.19) с ведущей собачкой и стойкой 4 служит для преобразования возвратно–вращательного движения коромысла 1 с собачкой 2 в прерывистое вращательное движение (в одном направлении) храпового колеса 3. Собачка 5 с пружиной 6 не дает колесу вращаться в обратную сторону. Высшая пара здесь образована собачкой и храповым колесом. Механизм может иметь входное звено и с возвратно–поступательным движением.
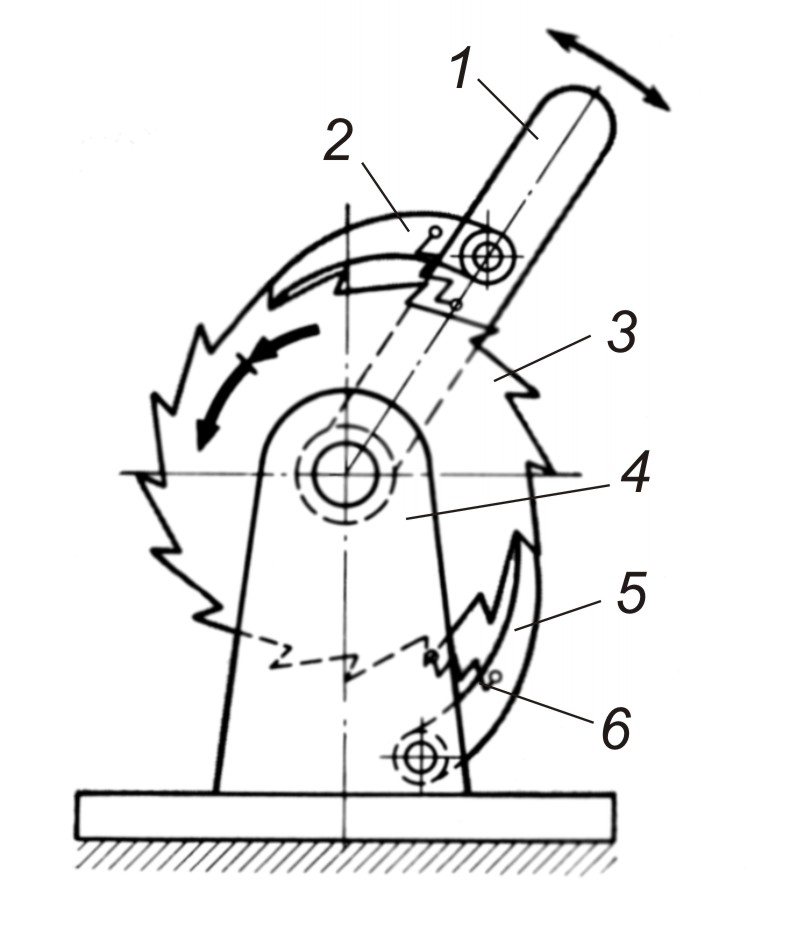
Рис. 2.19. Храповой механизм
Мальтийские и храповые механизмы широко применяются в станках и приборах.
Кинематические схемы
Кинематические схемы выполняют в соответствии с общими требованиями ГОСТ 2.701-84 (СТ СЭВ 651-77) по правилам, которые устанавливает ГОСТ 2.703-68* (СТ СЭВ 1187-78).
В зависимости от основного назначения кинематические схемы подразделяются на принципиальные, структурные и функциональные.
На принципиальной схеме представляют всю совокупность кинематических элементов и их соединений, предназначенных для осуществления регулирования, управления и контроля заданных движений исполнительных органов. На схеме изображают кинематические связи (механические и немеханические), предусмотренные внутри исполнительных органов, между отдельными парами, цепями и группами, а также связи с источником движения.
Принципиальную схему изделия вычерчивают, как правило, в виде развертки. Допускается схемы вписывать в контур изображения изделия, а также вычерчивать в аксонометрических проекциях.
Все элементы на схеме изображают условными графическими обозначениями или упрощенно (внешними очертаниями). Соотношение размеров условных графических обозначений взаимодействующих элементов на схеме должно примерно соответствовать действительному соотношению размеров этих элементов в изделии.
На принципиальных кинематических
схемах изображают: валы, оси, стержни,
шатуны и т.д. – основными (сплошными
толстыми) линиями толщиной s;
элементы, изображенные упрощенно, т.е.
внешними очертаниями (зубчатые колеса,
шкивы, кулачки и т.п.), - сплошными тонкими
линиями толщиной
![]() ;
контур изделия, в который вписана схема,
- сплошными тонкими линиями толщиной
;
контур изделия, в который вписана схема,
- сплошными тонкими линиями толщиной
![]() ;
кинематические связи между сопряженными
звеньями пары, вычерченными раздельно,
- штриховыми линиями толщиной
;
кинематические связи между элементами
или между ними и источником движения
через немеханические (энергетические)
участки – двойными штриховыми линиями
толщиной
;
расчетные связи между элементами –
тремя параллельными штриховыми линиями
толщиной
.
На принципиальной схеме изделия
указывают: наименование каждой
кинематической группы элементов,
учитывая ее основное функциональное
назначение (например, привод подачи),
которое наносят на полке линии-выноски,
проведенной от соответствующей группы;
основные характеристики и параметры
кинематических элементов, определяющие
исполнительные движения рабочих органов
изделия или его составных частей.
;
кинематические связи между сопряженными
звеньями пары, вычерченными раздельно,
- штриховыми линиями толщиной
;
кинематические связи между элементами
или между ними и источником движения
через немеханические (энергетические)
участки – двойными штриховыми линиями
толщиной
;
расчетные связи между элементами –
тремя параллельными штриховыми линиями
толщиной
.
На принципиальной схеме изделия
указывают: наименование каждой
кинематической группы элементов,
учитывая ее основное функциональное
назначение (например, привод подачи),
которое наносят на полке линии-выноски,
проведенной от соответствующей группы;
основные характеристики и параметры
кинематических элементов, определяющие
исполнительные движения рабочих органов
изделия или его составных частей.
Если принципиальная схема содержит отсчетные, делительные и другие точные механизмы и пары, то на схеме указывают данные об их кинематической точности: степень точности передачи, значения допускаемых относительных перемещений, поворотов, допускаемых мертвых ходов между основными ведущими и исполнительными элементами и т.п.
На принципиальной схеме допускается указывать: предельные значения частот вращения валов кинематических цепей; справочные и расчетные данные (в виде графиков, диаграмм, таблиц), представляющие последовательность процессов во времени и поясняющие связи между отдельными элементами.
Если принципиальная схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов, а также наибольшие нагрузки основных ведущих элементов. На такой схеме показывают опоры валов и осей с учетом их функционального назначения. В остальных случаях опоры валов и осей допускается изображать общими условными графическими обозначениями.
Каждому кинематическому элементу на схеме, как правило, присваивают порядковый номер, начиная от источника движения, или буквенно-цифровое позиционное обозначение. Валы допускается нумеровать римскими цифрами, остальные элементы нумеруют только арабскими цифрами. Порядковый номер элемента проставляют на полке линии-выноски. Под полкой линии-выноски указывают основные характеристики и параметры кинематического элемента.
Приведем буквенные коды наиболее распространенных элементов механизмов, установленные ГОСТ 2.703-68* (СТ СЭВ 1187-78): А – механизм (общее обозначение); В – валы; С – элементы кулачковых механизмов (кулачок, толкатель); Е – разные элементы; Н – элементы механизмов с гибкими звеньями (ремень, цепь); К – элементы рычажных механизмов (коромысло, кривошип, кулиса, шатун); М – источник движения (двигатель); Р – элементы мальтийских и храповых механизмов; Т – элементы зубчатых и фрикционных механизмов (зубчатое колесо, зубчатая рейка, зубчатый сектор, червяк); Х, У – муфты, тормоза.
На структурной схеме изображают все основные функциональные части изделия (элементы, устройства) и основные взаимосвязи между ними. Структурные схемы представляют или графическим изображением с применением простых геометрических фигур, или аналитической зависимостью, допускающей применение ЭВМ. Внутрь геометрической фигуры вписывают наименование соответствующей функциональной части.
На функциональной схеме изображают функциональные части изделия простыми геометрическими фигурами и связи между этими частями. Внутри фигур допускается помещать соответствующие обозначения или надписи. Должны быть указаны наименования всех изображенных функциональных частей.
Обозначения функциональных частей располагают в последовательности их функциональной связи. Допускается учитывать действительное расположение функциональных частей.
Графические условные обозначения элементов на кинематических схемах, вычерчиваемых в ортогональных проекциях, установлены ГОСТ 2.770-68* (СТ СЭВ 2519-80). Примеры условных обозначений элементов машин и механизмов приведены в табл. 2.2, характера движения – в табл. 2.3.
Таблица 2.2
Условные графические обозначения элементов машин и механизмов на кинематических схемах
Наименование |
Обозначение |
1 |
2 |
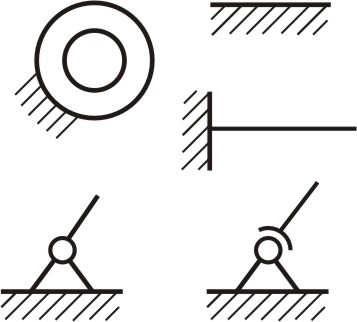
Неподвижное звено (стойка)
Примечание. Для указания неподвижности любого звена часть его контура покрывают штриховкой |
|
Продолжение табл. 2.2
1 |
2 |
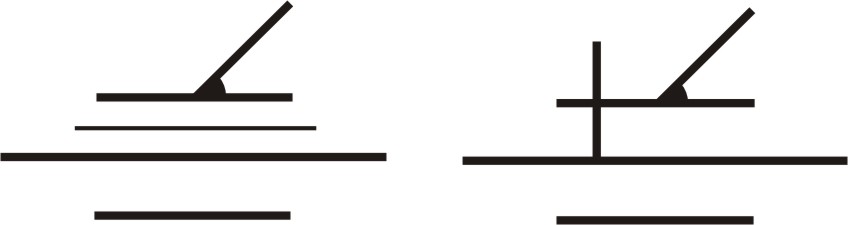
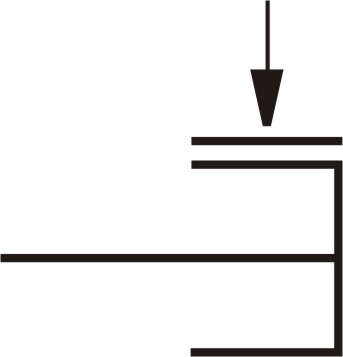
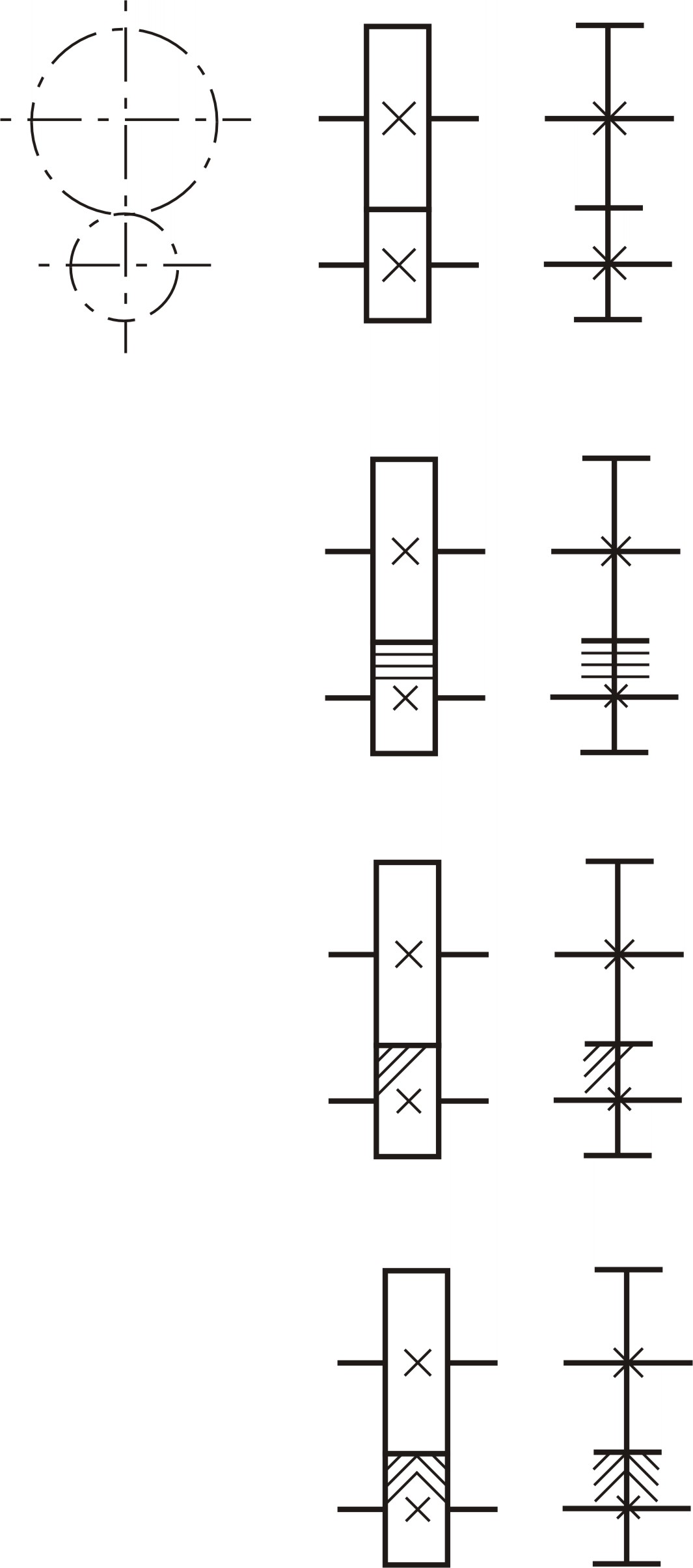
Соединение частей звена:
неподвижное
неподвижное, допускающее регулировку
неподвижное соединение детали с валом или со стержнем |
|
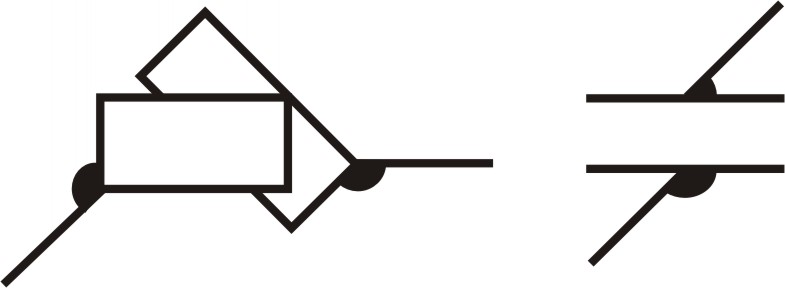
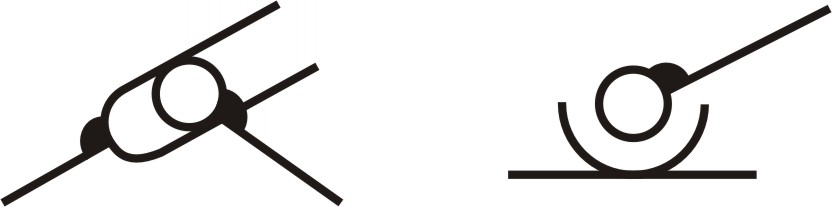
Кинематическая пара:
вращательная
вращательная многократная (например, двукратная)
поступательная
|
|

Продолжение табл. 2.2
1 |
2 |
винтовая
цилиндрическая
сферическая с пальцем
карданный шарнир
сферическая (шаровая)
плоскостная
трубчатая (шар-цилиндр)
точечная (шар-плоскость) |
|

Продолжение табл. 2.2
1 |
2 |
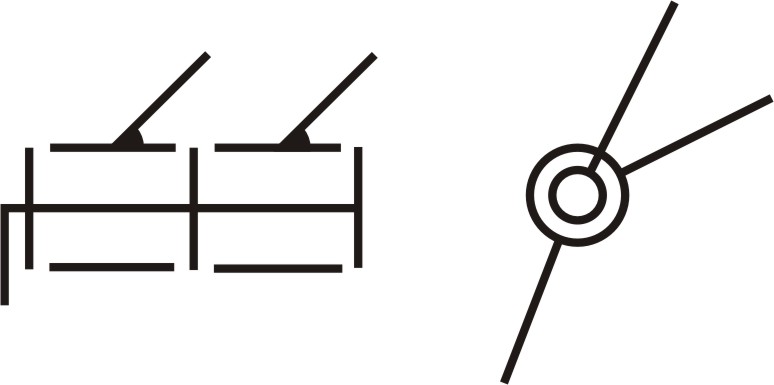
Подшипники скольжения и качения на валу (без уточнения типа):
радиальные
упорные |
|
Подшипники качения:
радиальные
радиально-упорные односторонние
радиально-упорные двусторонние
упорные односторонние
упорные двусторонние |
|
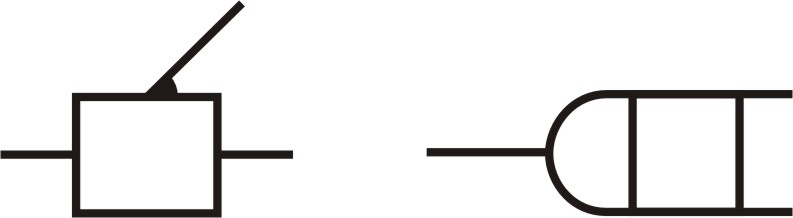
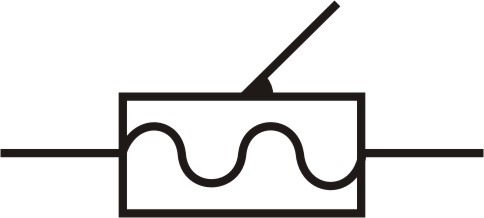
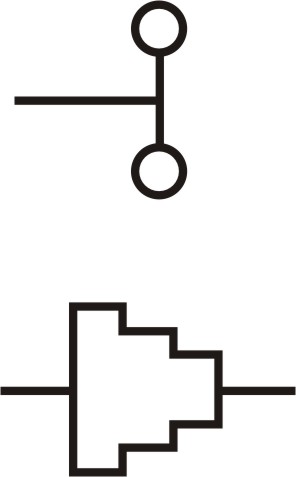
Муфта (общее обозначение без уточнения типа) |
|
Тормоз (общее обозначение без уточнения типа) |
|

Продолжение табл. 2.2
1 |
2 |
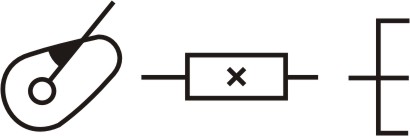
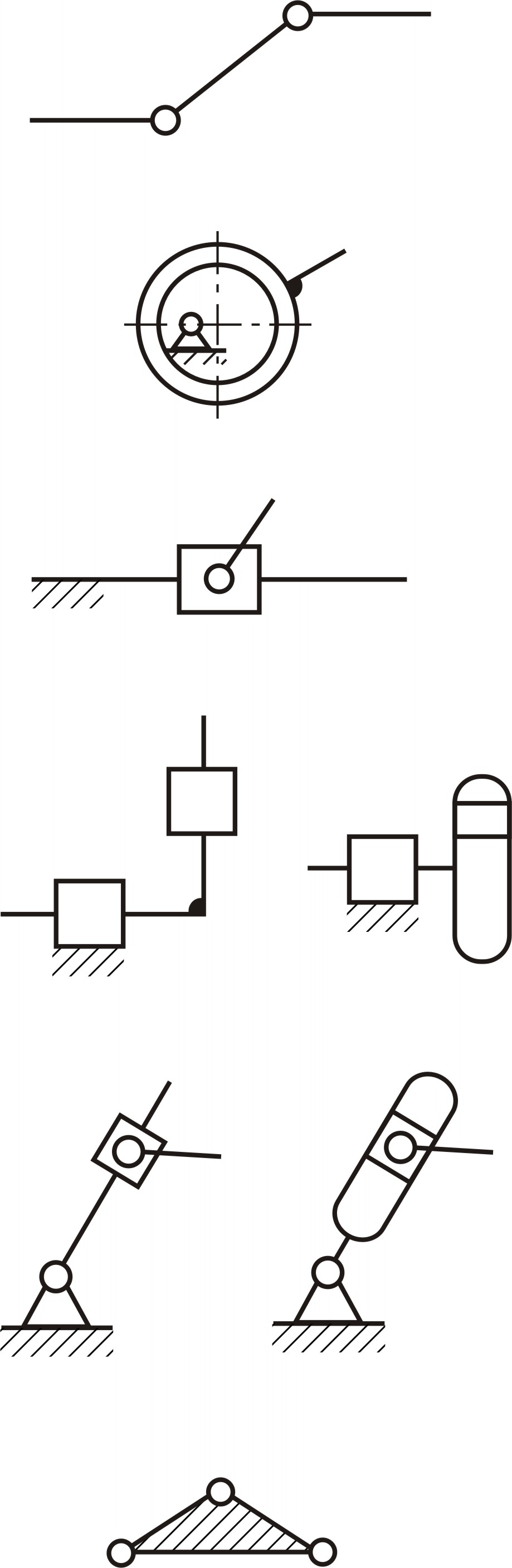
Звено рычажных механизмов двухэлементное: кривошип, коромысло, шатун
эксцентрик
ползун
кулиса
Звено рычажных механизмов трехэлементное
Примечания:
|
|
Продолжение табл. 2.2
1 |
2 |
Передача фрикционная:
с цилиндрическими роликами
с коническими роликами |
|
Маховик на валу |
|
Шкив ступенчатый, закрепленный на валу |
|
Продолжение табл. 2.2
1 |
2 |
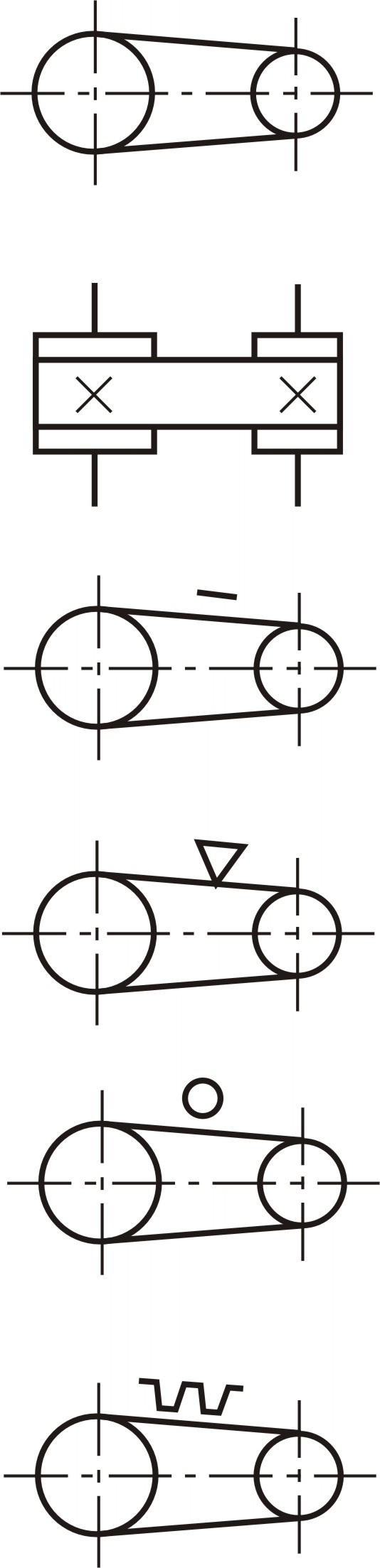
Ременная передача:
без уточнения типа ремня
плоским ремнем
клиновидным ремнем
круглым ремнем
зубчатым ремнем |
|
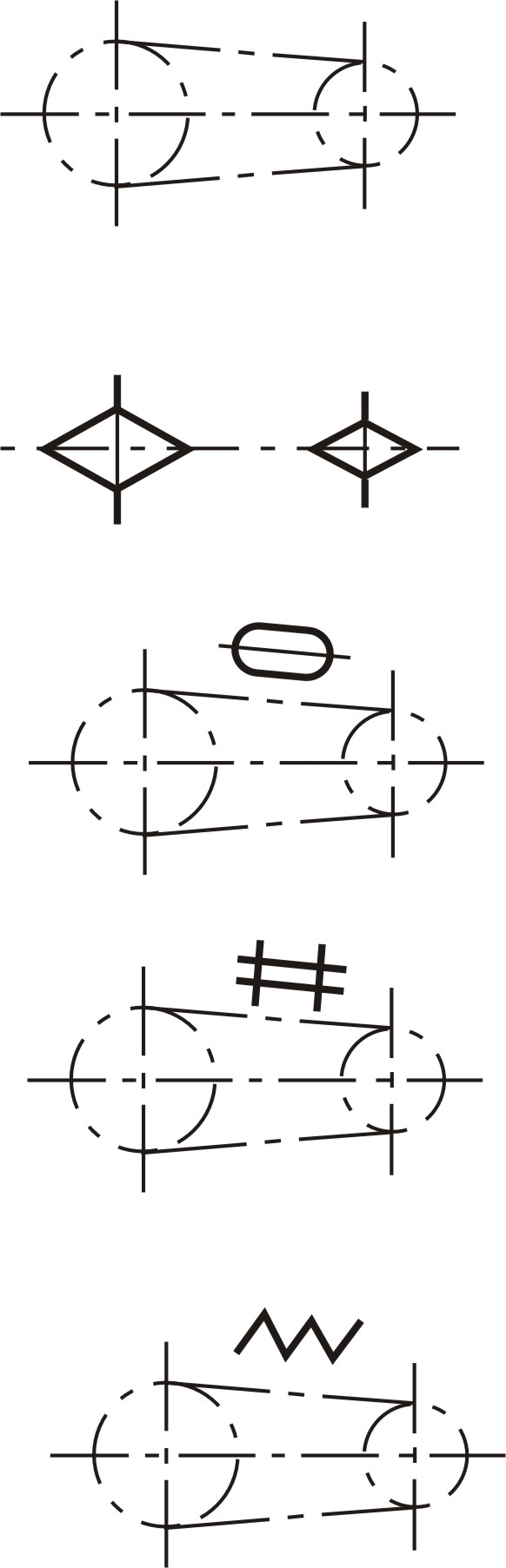
Цепная передача:
общие обозначения без уточнения типа цепи
круглозвенной цепью
пластинчатой цепью
зубчатой цепью |
|
Продолжение табл. 2.2
1 |
2 |
Передача зубчатая цилиндрическая (внешнее зацепление):
общее обозначение без уточнения типа зубьев
то же с прямыми зубьями
то же с косыми зубьями
то же с шевронными зубьями |
|
Передачи зубчатые с пересекающимися валами и конические (общие обозначения без уточнения типа зубьев) |
|
Передача зубчатая реечная (общее обозначение без уточнения типа зубьев) |
|

Окончание табл. 2.2
1 |
2 |
Передача зубчатая со скрещивающимися валами (червячная с цилиндрическим червяком) |
|
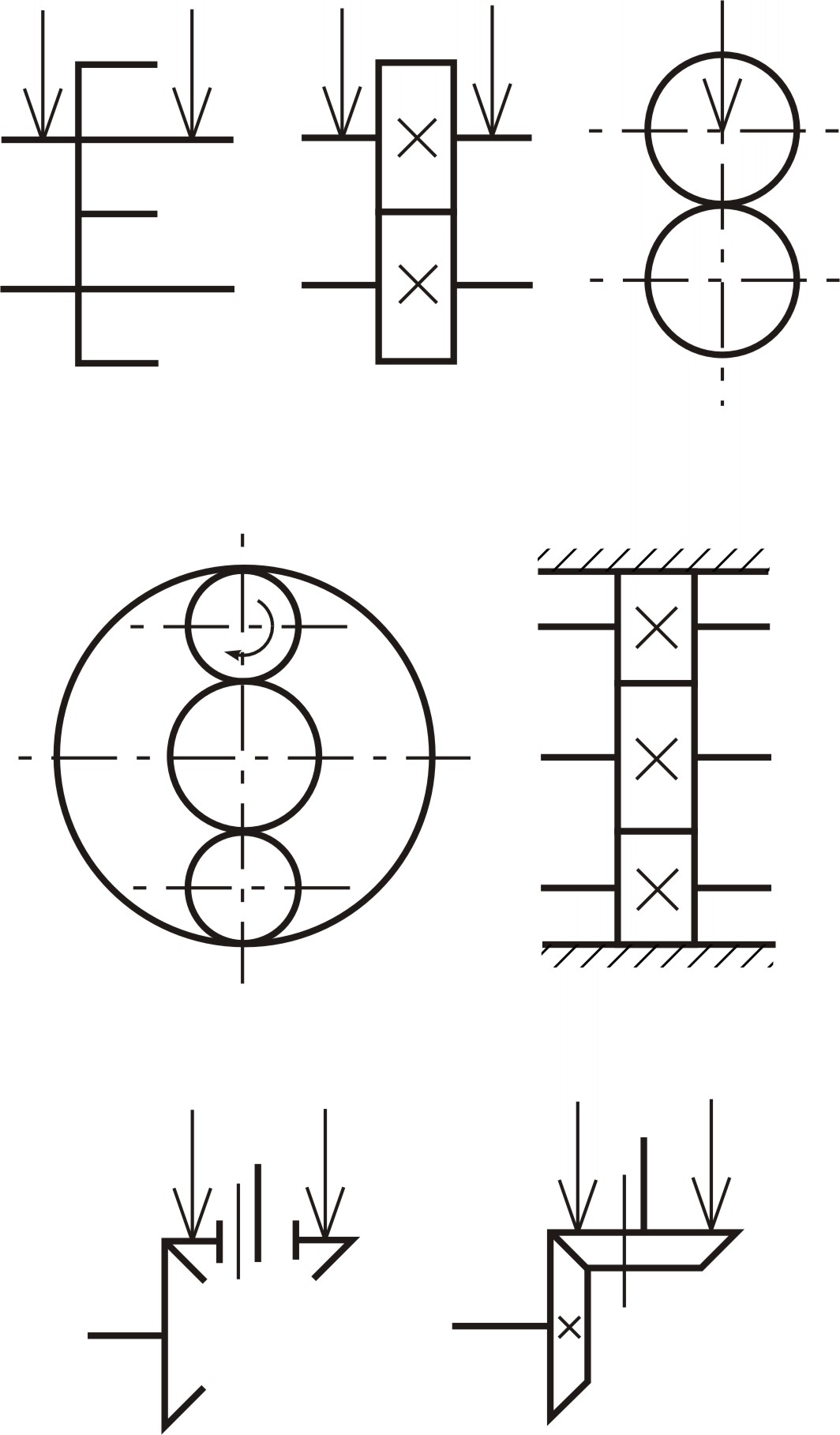
Таблица 2.3
Условные графические обозначения характера движения
на кинематических схемах
Характер движения |
Обозначение |
1 |
2 |
Одностороннее движение (общее обозначение): прямолинейное
вращательное с осью вращения в плоскости чертежа
вращательное с осью вращения, перпендикулярной к плоскости чертежа
винтовое с осью вращения в плоскости чертежа
винтовое с осью вращения, перпендикулярной к плоскости чертежа
|
|
Возвратное движение (общее обозначение):
прямолинейное
|
|
Окончание табл. 2.3
1 |
2 |
вращательное с осью вращения в плоскости чертежа
вращательное с осью вращения, перпендикулярной к плоскости чертежа
винтовое с осью вращения в плоскости чертежа
винтовое с осью вращения, перпендикулярной к плоскости чертежа |
|
Одностороннее движение с мгновенной остановкой в промежуточном положении: прямолинейное
вращательное |
|
Одностороннее движение с выстоем в промежуточном положении: прямолинейное
вращательное |
|
Одностороннее движение с частичным обратным движением: прямолинейное
вращательное |
|
Возвратное движение с выстоем в одном крайнем положении: прямолинейное
вращательное |
|