

Кривошипно–кулисные механизмы
На рис. 2.15 изображены кривошипно-кулисные механизмы: звено 3 (подвижная направляющая для звена 2) называется кулисой, звено 2 - кулисным камнем. Если длина стойки АС=l больше длины кривошипа АВ=r, то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3 (рис. 2.15, а). Если АС меньше АВ, то получаем механизм с вращающейся кулисой (рис. 2.15, б). Причем при равномерном движении кривошипа кулиса вращается с переменной угловой скоростью.
Кулисные механизмы используются в насосах (пневматических, масляных), а также в металлорежущих станках (продольно-строгальных, долбежных).
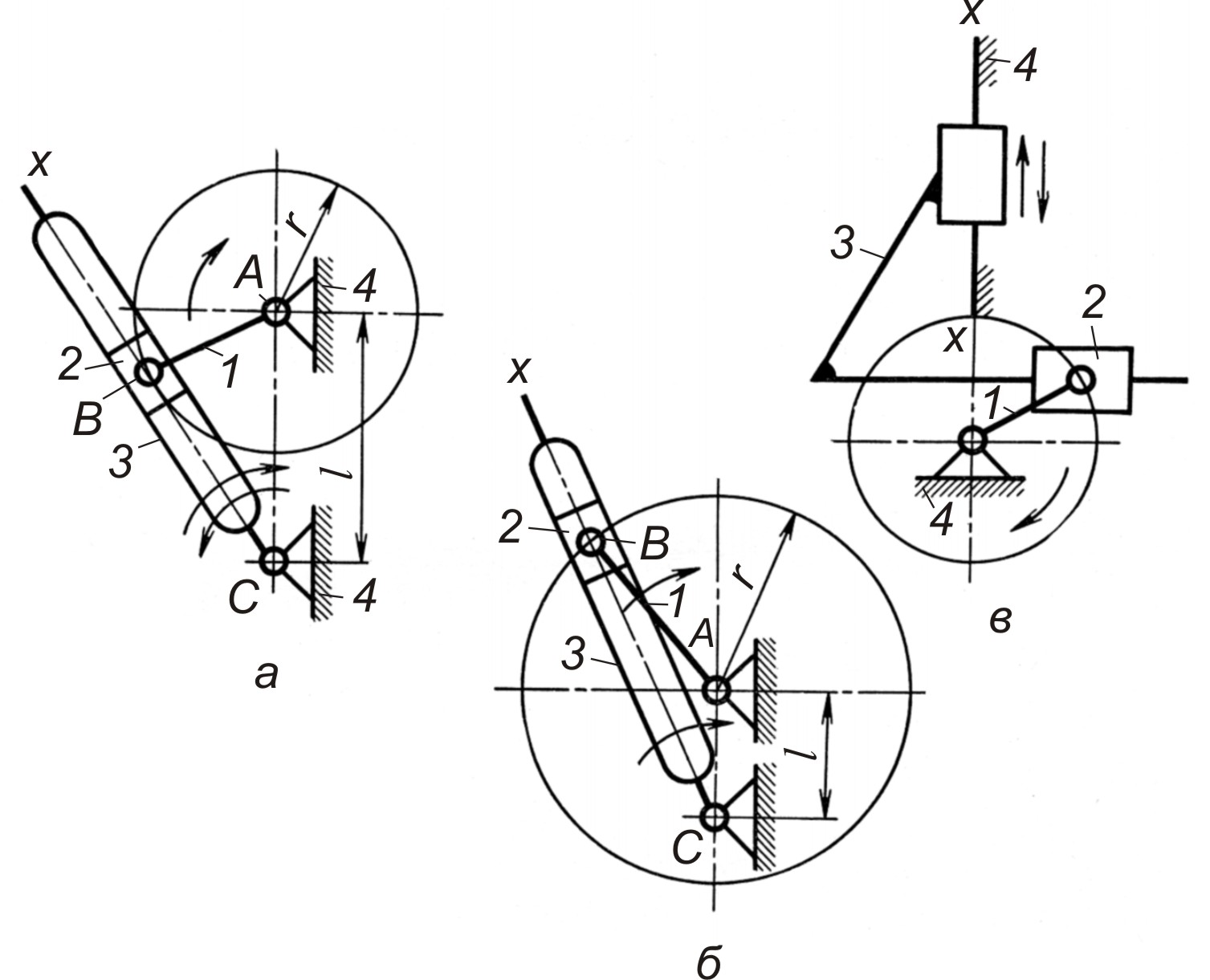
Рис. 2.15. Кривошипно-кулисные механизмы
Рассмотренные механизмы являются плоскими, обладают одной степенью подвижности. В технике находят применение и пространственные рычажные механизмы.
Рычажные механизмы - пример механизмов с низшими парами. Ниже рассмотрены механизмы с высшими парами.
Кулачковые механизмы
Кулачковые механизмы находят широкое применение в приборах и машинах автоматического действия, станках-автоматах. Предназначены для преобразования вращательного или возвратно-поступательного движения ведущего звена в возвратно-поступательное или возвратно-вращательное движение ведомого звена.
В наиболее простом конструктивном исполнении кулачковый механизм состоит из трех звеньев, которые образуют между собой две низшие кинематические пары V класса и одну высшую – IV класса.
На рис. 2.16 приведена схема простейшего кулачкового механизма.

Рис. 2.16. Схема кулачкового механизма
Ведущее звено - кулачок 1 скользит слева направо. Его верхняя рабочая поверхность имеет переменную кривизну. Ведомое звено - толкатель 2, опираясь своим острием на кулачек, скользит по направляющей вертикально вверх (направление его движения перпендикулярно к направлению движения кулачка). Задавая определенный профиль поверхности кулачка, можно менять закон движения толкателя. Данный кулачок (изображенный на рисунке) должен иметь возвратно-поступательное движение.
Для того чтобы ведущее звено могло все время двигаться равномерно, применяют механизмы с вращающимся кулачком. Возможное исполнение механизма показано на рис. 2.17.
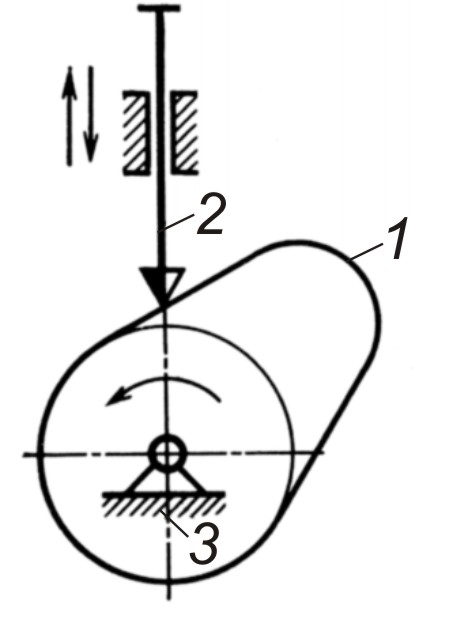
Рис. 2.17. Кулачковый механизм
с вращающимся кулачком
Толкатель может быть выполнен остроконечным, сферическим грибовидным, плоским, с цилиндрическим роликом. Перечисленные разновидности имеют свои достоинства и недостатки. Например, остроконечный толкатель быстро изнашивается, поэтому его следует применять только в тихоходных механизмах при незначительных передаваемых усилиях. Использование износостойкого цилиндрического ролика увеличивает размеры механизма
Основное достоинство кулачкового механизма - кинематическая универсальность, т.е. способность воспроизведения практически любого требуемого закона движения толкателя за счет выбора соответствующего профиля кулачка.
В практике проектирования наибольшее применение получили простые законы движения толкателя: линейные, параболические, косинусоидальные, синусоидальные.
Во время работы кулачкового механизма возникают инерционные усилия, направленные на отрыв рабочей поверхности толкателя от профиля кулачка. Поэтому одно из важнейших требований состоит в том, что кулачок и толкатель должны быть постоянно в соприкосновении, т.е. они должны быть замкнуты. Замыкание высшей кинематической пары «кулачок – толкатель» может быть кинематическим (геометрическим) или силовым. Кинематическим, когда в кулачке выполняется паз, по которому перемещается ролик толкателя, произвольное перемещение толкателя при этом исключается. Силовое замыкание обычно осуществляется за счет пружины. Реже используют пневматические и гидравлические устройства, грузы.
Необходимость замыкания является недостатком механизма, т.к. усложняет конструкцию. Другим недостатком является сложность изготовления профиля кулачка, особенно когда от него требуется высокая точность.
В технике используются как плоские, так и пространственные механизмы. Обычно они применяются в системах управления работой машин и приборов малой и средней мощности, в станках-автоматах.