

Винтовой механизм
Винтовой механизм состоит из винта и гайки. Он широко используется для преобразования вращательного движения в поступательное. Возможны несколько вариантов применения такого механизма:
ведущим элементом является винт, которому сообщается вращательное движение. Гайка закреплена неподвижно, поэтому винт, вращаясь, одновременно будет перемещаться поступательно (механизм слесарных тисков);
ведущим элементом также является винт и ему сообщается вращательное движение, но он закреплен так, что лишен возможности поступательно перемещаться. Гайка, в свою очередь, лишена возможности вращаться и будет перемещаться лишь поступательно;
ведущим элементом является гайка, которой сообщается вращательное движение. Поскольку она закреплена так, что может лишь вращаться, винт будет двигаться поступательно (механизм винтового домкрата);
ведущим элементом является гайка, ей сообщается поступательное движение. Ведомым движением в этом случае будет вращение винта (механизм быстродействующей отвертки). Возможно и обратное преобразование – поступательного движения винта во вращательное движение гайки.
Первые три варианта используются для преобразования вращательного движения в поступательное, а четвертый – поступательного движения во вращательное. Последнее преобразование возможно лишь при одном непременном условии: угол подъема винтовой линии должен быть большим.
Кинематический расчет винтового механизма прост: за один оборот линейное перемещение равно ходу резьбы, т.е. произведению шага на число заходов.
При простой и компактной конструкции передача винт–гайка позволяет получать большой выигрыш в силе или осуществлять медленные и точные перемещения.
Основной недостаток передачи – низкий КПД. В соответствии с этим передачу «винт – гайка» применяют в механизмах, где необходимо создавать большие усилия (домкраты, прессы и т.п.), а также в механизмах точных перемещений (механизмы подачи станков, измерительные, установочные и регулировочные механизмы).
Рычажные механизмы
Среди механизмов данного типа наибольшее распространение получили плоские кривошипно-шатунные и кривошипно-кулисные механизмы.
Кривошипно–шатунный механизм
Назначение первого механизма (рис. 2.13) - преобразование вращательного движения звена 1 в возвратно-поступательное движение звена 3 или наоборот. Звено 1, образующее со стойкой 4 вращательную кинематическую пару, называют кривошипом. Звено 3, образующее со стойкой 4 поступательную кинематическую пару, называют ползуном. Линия движения ползуна может проходить через центр вращения кривошипа, а может и не проходить (смещение выполняется для уменьшения давления на направляющую xx).

Рис. 2.13. Кривошипно-шатунный механизм
Механизм, показанный на рисунке 2.14, служит для преобразования вращательного движения звена 3 или наоборот. Качающееся звено 3 называют коромыслом или балансиром. Поэтому механизм называют кривошипно–балансирным или кривошипно–коромысловым.
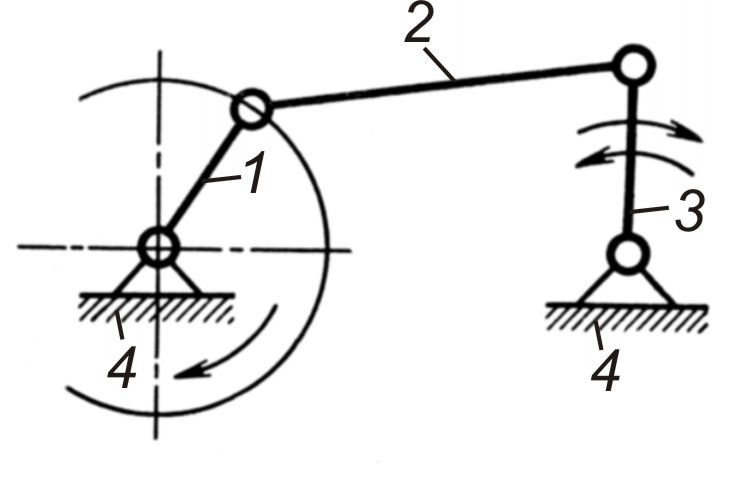
Рис. 2.14. Кривошипно-балансирный механизм
В обоих механизмах звено 2 совершает сложное плоское движение и образует с другими подвижными звеньями вращательные кинематические пары. Такое звено называют шатуном.
Кривошипно-шатунные механизмы используют в поршневых двигателях (гидравлических и пневматических), насосах, компрессорах.