

4.2. Самопишущие приборы
Как и показывающие, аналоговые самопишущие приборы (СП) разделяются на электромеханические и электронные.
В электромеханических СП могут применяться различные системы преобразователей электрической величины в механическую. Но чаще всего это магнитоэлектрический измерительный механизм.
Принцип действия простейшего электромеханического (магнитоэлектрического) СП основан (рис. 60) на взаимодействии подвижной катушки (рамки) 3 с током (пропорциональным исследуемому сигналу) с полем постоянного магнита 1.

Рис. 60. Упрощенное устройство электромеханического СП:
1 Постоянным магнит; 2 ось; 3 катушка; 4 перо; 5 двигатель;
6 Бумага; 7 стрелка; 8 шкала
Движение поворот на угол α(t) катушки 3, закрепленной на оси 2, передается отсчетному устройству (ОУ), состоящему из стрелки 7 и шкалы 8, а также регистрирующему устройству (РУ) образованному пером 4 и движущейся бумагой 6. Развертка во времени осуществляется равномерным перемещением диаграммной бумаги 6, благодаря вращению вала двигателя 5.
Обобщенная структура электромеханического СП показана на рис. 61, а. Входной сигнал X(t) поступает в измерительную цепь ИЦ, в которой осуществляются вспомогательные преобразования (масштабирование сигналов, преобразование различных величин в ток), и далее, обычно в виде тока i(t), на измерительный механизм ИМ. Выходная величина ИМ угол поворота α(t) определяет показания ОУ и положение пишущего органа (пера) РУ.
Все достоинства обычного магнитоэлектрического механизма сохраняются в СП, но, вследствие большего необходимого вращающего момента (причина заметное трение пишущего органа о бумагу), потребляется большая мощность от источника исследуемого сигнала.
Типичные значения классов точности электромеханических СП 0,5...2,5 %. Полоса частот регистрируемых сигналов узкая 0...5 Гц.

Рис. 61. Обобщенные структуры электромеханического (а) и электронного (б) СП
Электронные СП отличаются от электромеханических как по структуре (рис. 61, б), так и по конструкции. Классический магнитоэлектрический измерительный механизм заменен реверсивным двигателем, в схеме присутствуют различные аналоговые измерительные преобразователи (например, усилители, преобразователи переменного напряжения в постоянное и др.).
Развертка во времени выполняется так же, как и в электромеханических СП, т.е. дополнительным двигателем, равномерно перемещающим бумагу.
В основу работы электронных СП положен принцип уравновешивающего (компенсирующего) преобразования, в соответствии с которым электромеханическая отрицательная обратная связь (ОС) обеспечивает уравновешивание входного сигнала, например напряжения UY (t), меняющимся компенсирующим напряжением Uк(t).
Разница U(t) входного UY (t) и компенсирующего Uк(t) сигналов поступает на усилитель Ус, выходное напряжение которого управляет реверсивным двигателем РД. Образованный угол поворота α(t) определяет показания ОУ и РУ. Компенсирующее напряжение Uк(t) формируется узлом ОС и меняется таким образом, что уменьшает разницу потенциалов U(t) на входе усилителя до минимального, различаемого усилителем, значения.
Узел ОС может быть реализован, например реохордом, движок которого перемещается валом РД. Формируемое при этом компенсирующее напряжение Uк(t) уравновешивает входное напряжение UY (t), которое определяет положение стрелки ОУ и пера РУ по оси ординат Y .
Качество уравновешивания и, следовательно, метрологические (статические) характеристики в большей мере определяются усилителем Ус и узлом отрицательной обратной связи. Динамика электронных СП характеризуется верхними частотами исследуемых сигналов до значений 0,5...2 Гц.
Существует большой класс СП, содержащих преобразователи входных периодических напряжений и токов в постоянные значения (часто в средние квадратические). Не следует путать частотные свойства входных преобразователей таких СП (обычно до единиц десятков килогерц) с динамическими возможностями собственно механизма (обычно — единицы герц).
Англоязычные термины этого класса регистраторов: Recorder, Paper Recorder, Y T Recorder.
В некоторых моделях СП применяется термическая (тепловая) регистрация. При этом РУ представляет собой нагретый стержень (тепловое перо), который, перемещаясь, воздействует на термочувствительный носитель (термобумагу), оставляя видимый след.
Быстродействующие самопишущие приборы (БСП) в отличие от обычных СП, имеют более высокое быстродействие. Недостаточно хорошая динамика обычных СП заставила искать конструктивные и технологические решения, обеспечивающие более широкую полосу частот. В основе этих решений лежат использование увеличенного противодействующего момента и сознательное уменьшение размаха (амплитуды) колебаний подвижной части. Диапазоны частот исследуемых сигналов в БСП 0... 150 Гц. Существует разновидность БСП, основанная на струйной записи (отклонение меняющимся электрическим полем заряженной струи краски). Такие приборы обеспечивают еще более высокие динамические характеристики (до 2 кГц), благодаря меньшей, чем в механической системе, массе подвижной части (струи). Однако из-за своей сложной конструкции и специфики обслуживания они распространены не так широко.
Двухкоординатные самопишущие приборы (ДСП) предназначены в основном для построения функциональных зависимостей меняющихся сигналов X(t) и Y(t). Такой прибор может выступать в роли характериографа, инструмента для построения, например, зависимости вход выход различных четырехполюсников.
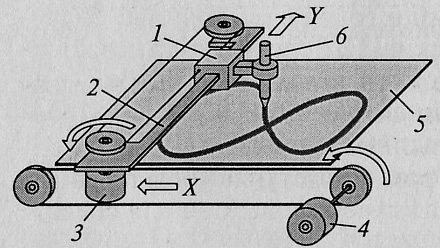
Рис. 62. Конструкция двухкоординатного самопишущего прибора: 1 каретка; 2 рейка; 3 реверсивный двигатель оси Y; 4 реверсивный двигатель оси X; 5 бумага; 6 перо
Конструкция ДСП (рис. 68) обеспечивает перемещение пера независимо по двум координатам (Y и X). Каретка 1, на которой закреплено перо (фломастер, стеклянный капилляр, карандаш и т.п.) 6, благодаря реверсивному двигателю 3 и нерастяжимой нити, движется по рейке 2. Это определяет положение пера по оси ординат (оси Y). Рейка 2 с расположенной на ней кареткой 1 может перемещаться параллельно-поступательно при вращении вала второго реверсивного двигателя 4, что определяет положение пера по оси абсцисс (оси X). Лист бумаги 5 в этой конструкции неподвижен и по окончании регистрации несет двухкоординатное изображение. Структура ДСП содержит два обычно идентичных канала уравновешивающего преобразования Y(t) и Х(t), которые обеспечивают отклонения, соответственно, по осям ординат и абсцисс.
Динамические характеристики ДСП аналогичны характеристикам электронных СП.
Существует разновидность конструкции ДСП, в которой по одной из осей перемещается лист бумаги. При этом рейка 2 с закрепленным на ней реверсивным двигателем 3 неподвижна. По рейке перемещается каретка 1 с пером 6 (как и в предыдущем варианте), что определяет положение пера по оси Y , а положение пера относительно листа бумаги по оси X определяется перемещением собственно листа 5. Эту функцию выполняют реверсивный двигатель 4 и прижимные ролики. Окончательный результат регистрации тот же двухкоординатное изображение (Y X). Некоторое преимущество подобной конструкции заключается в меньшей механической инерционности тракта X, поскольку масса перемещаемого листа бумаги меньше суммарной массы рейки, закрепленного на ней двигателя и каретки с пером.
Двухкоординатный самопишущий прибор может быть использован и в режиме обычного СП (режим Y Т). Для этого вместо канала (обычно сменного блока) X(t) используется канал (сменный блок) развертывающего линейно изменяющегося напряжения.
Существуют устройства, внешне похожие на ДСП, так называемые плоттеры (Plotters), входными сигналами для которых служат цифровые (логические) сигналы. Плоттер не является в полном смысле измерительным прибором, а выступает обычно в качестве периферийного устройства графического вывода для средств вычислительной техники.
В настоящее время широко распространен еще один самостоятельный класс приборов, которые могут выдавать результат регистрации в виде диаграммы сигнала на бумаге цифровые измерительные регистраторы (Transient Memory Recorder, ADC Recorder). Но внутреннее содержание таких приборов совершенно другое. Основными узлами их являются аналого-цифровой преобразователь (АЦП) и достаточно большого объема запоминающее устройство. Полоса частот исследуемых сигналов у таких регистраторов определяется быстродействием АЦП и значительно шире (может достигать единиц десятков мегагерц). Зарегистрированный массив кодов затем преобразуется в графический образ входного сигнала на бумаге.