

8 Структурный синтез рычажных механизмов
Задача структурного синтеза механизмов является обратной по отношению к задаче структурного анализа и состоит в проектировании структурной схемы механизма. Синтез механизмов возможен двумя методами. Первый метод заключается в присоединении к основному механизму одной или нескольких групп Ассура. При этом следует иметь в виду, что добавление к механизму структурной группы любого класса и вида не должно менять степени подвижности механизма. На рис. 11 приведены примеры образования механизмов II класса (рис. 11, а) и III класса (рис. 11, б).
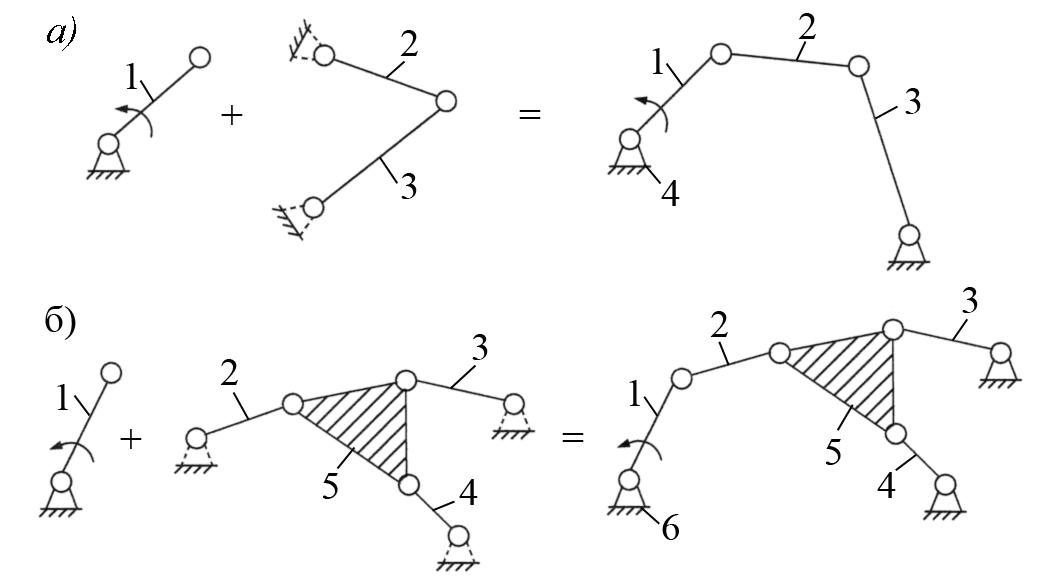
Рис. 11
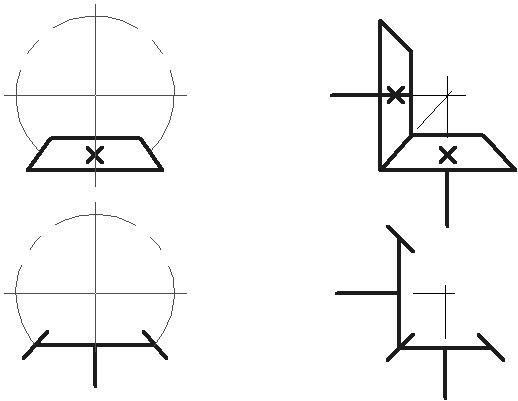
Второй метод синтеза состоит в преобразовании одного из звеньев структурной группы в два звена, образующих поступательную кинематическую пару V или IV классов. На рис. 12, а, б представлены структурные группы и гидрорычажные механизмы соответственно II и IV классов, образованные этим методом.
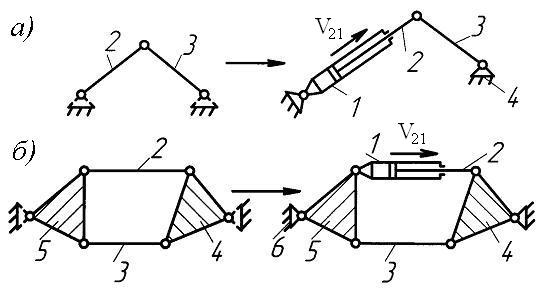
Рис. 12
Следует отметить, что для механизмов с гидроприводом заданным является относительное движение поршня 2 в цилиндре 1, поэтому их структурный анализ по Ассуру не возможен. Механизм должен рассматриваться как неделимая структурная единица – гидрорычажный механизм соответствующего класса.
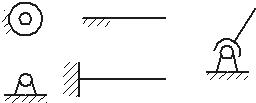
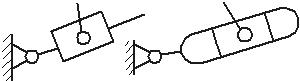
Условные обозначения кинематических пар и звеньев.
Таблица
Вал, валик, ось, стержень, шатун и т.п |
|
Неподвижное звено (стойка). Для указания неподвижности любого звена часть его контура покрывают штриховкой |
|
Неподвижное соединение частей звена |
|
Неподвижное соединение частей звена, допускающее регулировку |
|
Неподвижное соединение детали с валом, стержнем |
|
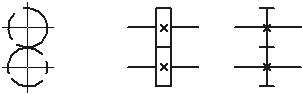
Вращательная кинематическая пара |
|
Вращательная многократная (двухкратная) кинематическая пара |
|
Поступательная кинематическая пара |
|
Винтовая кинематическая пара |
|
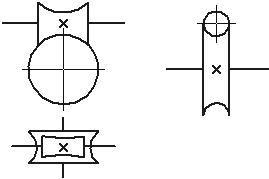
Цилиндрическая кинематическая пара |
|
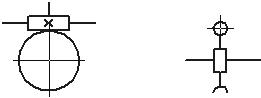
Кинематическая пара сферическая с пальцем |
|
Кинематическая пара карданного шарнира |
|
Сферическая кинематическая пара |
|
Подшипники скольжения радиальные |
|
Кулачки плоские |
|
Кулачки вращающиеся |
|
Толкатель дуговой
|
|
Толкатель роликовый |
|
Толкатель плоский |
|
Ползун |
|
Кулиса |
|
Звено рычажных механизмов трёхэлементное |
|
Цилиндрические зубчатые передачи внешнего зацепления |
|
Цилиндрические зубчатые передачи внутреннего зацепления |
|
Цилиндрические зубчатые передачи с некруглыми колёсами |
|
Передачи с пересекающимися валами |
|
Передачи зубчатые со скрещивающимися валами гипоидные |
|
Передачи зубчатые со скрещивающимися валами червячные |
|
Передачи зубчатые со скрещивающимися валами глобоидные |
|
Передачи зубчатые реечные |
|
Передачи зубчатые сектором |
|
Винт, передающий движение |
|
Гайка на винте |
|



Порядок проведения лабораторной работы
1. Изучить основные понятия и определения, условные обозначения кинематических пар и звеньев.
2. Составить структурные схемы четырёх плоских механизмов, данных преподавателем: по две схемы рычажных и зубчатых механизмов.
3. Провести структурный анализ плоских рычажных механизмов: определить по формуле Чебышева количество избыточных связей q. Если в механизме имеется контурная избыточная связь (q=1), необходимо сделать механизм оптимальным, удалив звено, которое вносит избыточную связь.
4. Изобразить структурную схему полученного оптимального механизма и убедиться с помощью формулы Чебышева, что механизм действительно не имеет избыточных связей (q=0).
5. Оптимальные рычажные механизмы (q=0) без высших кинематических пар (рв=0), рассчитанные в пунктах 3 и 4, необходимо представить в виде совокупности одной или нескольких структурных групп и одного (при W=1) или нескольких (при W>1) начальных механизмов. При этом следует различать, чем является совокупность четырёх звеньев и шести кинематических пар – группами III-IV классов или соединением двух простейших структурных групп II класса.
6. Для заданных зубчатых механизмов проверить наличие или отсутствие в них избыточных связей q.
7. Два оптимальных рычажных механизма (рассмотренных в пунктах 3 и 4) представить в виде пространственных, т.е. реально изготовленных механизмов. Определить количество избыточных связей по формуле Малышева. Преобразовать эти механизмы путём понижения класса кинематических пар
1) в оптимальные механизмы;
2) в механизмы с дополнительной степенью подвижности (q<0) – местной или групповой.
Контрольные вопросы.
Определение механизма, звена, кинематической пары.
Виды звеньев.
Классификация кинематических пар.
Определение структурной группы, виды структурных групп.
Формула Чебышева с пояснением параметров и коэффициентов, входящих в формулу.
Формула Малышева с пояснением параметров и коэффициентов, входящих в формулу.
Оптимальные механизмы, механизмы с избыточными связями и дополнительными степенями подвижности.
Методы получения оптимальных механизмов – плоских и пространственных.
Структурный анализ механизмов.
10.Структурный синтез рычажных механизмов.
Список использованных источников
Фролов К.В. и др. Теория механизмов и машин: учеб. Для втузов.- М. : Высшая школа, 2001. 496с.
Решетов Л.Н. Самоустанавливающиеся механизмы: Справочник. М., 1979, 334 с.
ГОСТ 2.770-68. Обозначения условные графические в схемах. Элементы кинематики.