

Лабораторная работа №1
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Механизм – это система твердых тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения остальных тел.
Формирование механизма, т.е. соединение отдельных его частей в единую систему, сопровождается наложением связей. Правильное их распределение в строении механизма в большой степени предопределяет его надежную эксплуатацию. Поэтому при проектировании нужно из множества разнообразных механизмов выбрать самый подходящий и правильно подобрать его основные структурные элементы. А для этого прежде всего надо знать основные виды современных механизмов, их структурные характеристики, закономерности их строения.
1. Основные понятия и определения
Звенья механизма – твердые тела, состоящие из одной либо нескольких неподвижно соединенных деталей.
Звенья различают а) по конструктивным признакам: коленчатый вал, поршень, зубчатое колесо, кулачок и т.д.; б) по характеру их движения: кривошип – звено, совершающее полный оборот вокруг неподвижной оси; коромысло совершает неполный оборот; ползун – звено, совершающее возвратно-поступательное движение; шатун – звено, совершающее плоскопараллельное движение и т.д.
Неподвижное звено механизма называют стойкой. Звено, движение которого задано, называют входным, начальным или ведущим. Звено, совершающее движение, для которого предназначен механизм, называют выходным звеном или ведомым.
Механизмы могут быть как плоскими, так и пространственными. В плоских механизмах все его подвижные точки движутся в параллельных плоскостях. В пространственных механизмах подвижные точки их звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях.
Кинематическая пара (сокращенно - пара) это подвижное соединение двух соприкасающихся звеньев. Поверхность, линия или точка одного звена, находящиеся в соприкосновении с другим звеном, называется элементом кинематической пары. Чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута или геометрическим способом – за счет конструктивной формы звеньев, или силовым способом – силой тяжести, пружины, силой давления жидкости, газа и т.д. Поскольку через кинематическую пару передаются усилия от одного звена к другому, она во многом определяет работоспособность и надежность машины.
Кинематической цепью называют систему звеньев, связанных кинематическими парами. Различают замкнутые цепи, в которых каждое звено входит не менее чем в две кинематические пары, и незамкнутые цепи, в которых есть звенья, входящие только в одну кинематическую пару (роботы и манипуляторы).
2. Классификация кинематических пар
Кинематические пары различают по характеру соприкосновения звеньев: пару называют низшей, если элементы кинематических пар соприкасаются только по поверхности, и высшей, если касание элементов кинематических пар происходит по линиям или в точках. При этом линейный или точечный контакт понимается как первоначальный - при соприкосновении звеньев без усилия, а под нагрузкой звенья, образующие высшую пару, будут соприкасаться по некоторой фактической поверхности, называемой пятном контакта.
Кинематические пары классифицируют также по числу Н степеней свободы в относительном движении звеньев (подвижностей пары) и по числу S условий связи (ограничений), накладываемых парой на движение одного звена относительно другого.
Свободное тело в
пространстве имеет шесть степеней
свободы (три поступательных движения
вдоль каждой из осей координат
![]() ,
,
![]() ,
,
![]() и три вращательных движения вокруг
каждой из трех осей). Поэтому величины
и три вращательных движения вокруг
каждой из трех осей). Поэтому величины
![]() и
и
![]() связаны соотношением:
связаны соотношением:
![]() ,
где
,
где
![]() или 5. При
или 5. При
![]() пары не существует, а есть два тела,
движущихся независимо друг от друга.
При
пары не существует, а есть два тела,
движущихся независимо друг от друга.
При
![]() кинематическая пара становится жестким
соединением двух звеньев, т.е. одним
звеном. По величине
определяют класс кинематической пары.
На рис. 1 представлены кинематические
пары различных классов.
кинематическая пара становится жестким
соединением двух звеньев, т.е. одним
звеном. По величине
определяют класс кинематической пары.
На рис. 1 представлены кинематические
пары различных классов.
1п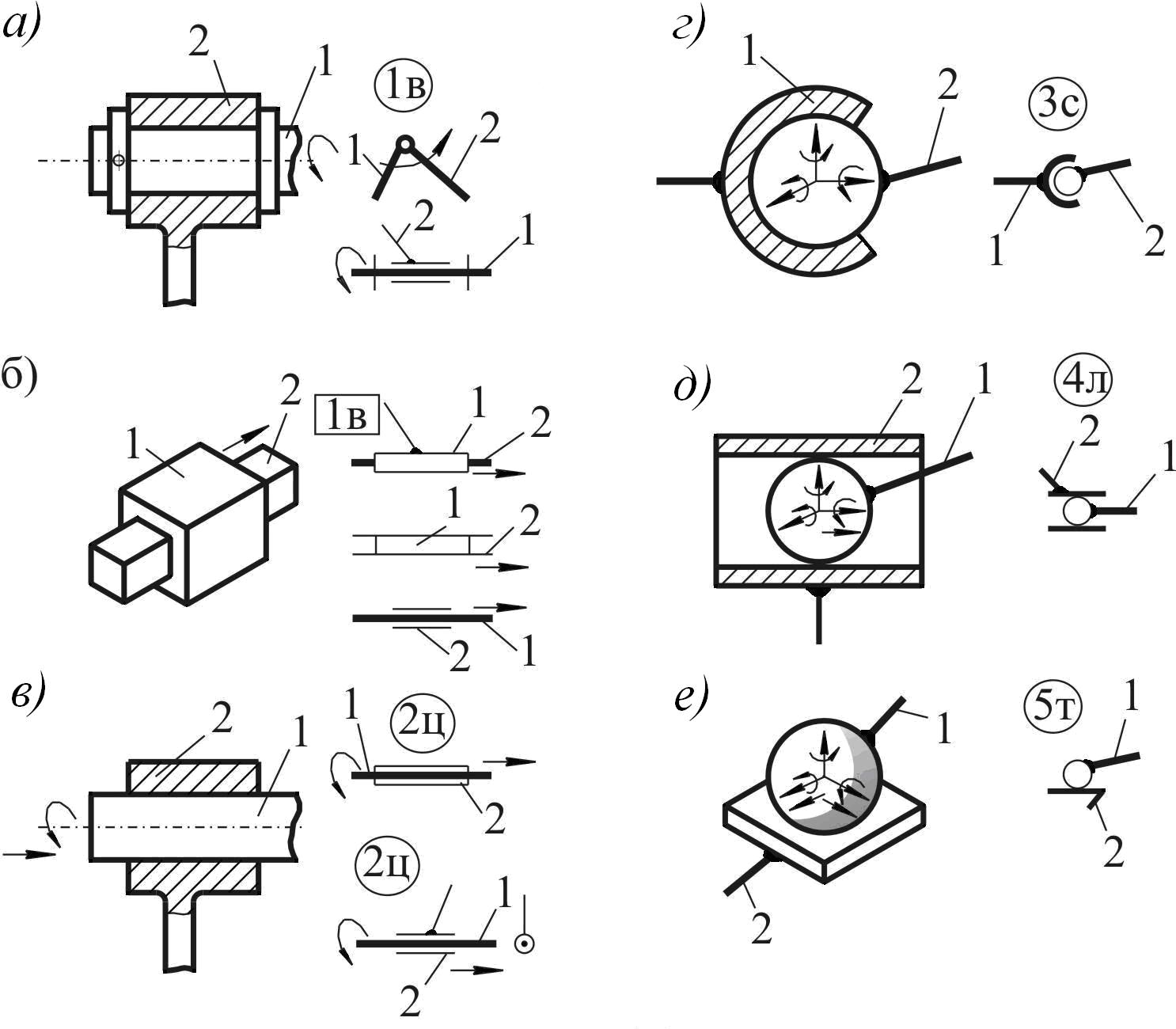
Рис. 1
Одноподвижные
кинематические пары V класса (Н=1, S=5)
могут быть двух видов: одноподвижная
вращательная пара (условное обозначение
![]() ,
рис. 1, а) допускает лишь одно
относительное вращательное движение
звеньев вокруг оси (показано стрелкой);
звенья 1 и 2 соприкасаются по цилиндрической
поверхности; следовательно, это низшая
пара, замкнута геометрически. Роль такой
кинематической пары выполняет более
сложная конструкция – шарикоподшипник,
называемый кинематическим соединением.
,
рис. 1, а) допускает лишь одно
относительное вращательное движение
звеньев вокруг оси (показано стрелкой);
звенья 1 и 2 соприкасаются по цилиндрической
поверхности; следовательно, это низшая
пара, замкнута геометрически. Роль такой
кинематической пары выполняет более
сложная конструкция – шарикоподшипник,
называемый кинематическим соединением.
Одноподвижная
поступательная кинематическая пара V
класса (условное обозначение
![]() ,
рис. 1, б) с геометрическим замыканием,
низшая, допускает лишь одно прямолинейное
поступательное относительное движение
звеньев.
,
рис. 1, б) с геометрическим замыканием,
низшая, допускает лишь одно прямолинейное
поступательное относительное движение
звеньев.
Двухподвижная
цилиндрическая кинематическая пара IV
класса (![]() ,
,
![]() ,
условное обозначение
,
условное обозначение
![]() ,
рис. 1, в) с геометрическим замыканием,
низшая, допускает независимые относительные
движения звеньев – вращательное вокруг
оси и поступательное вдоль оси
кинематической пары.
,
рис. 1, в) с геометрическим замыканием,
низшая, допускает независимые относительные
движения звеньев – вращательное вокруг
оси и поступательное вдоль оси
кинематической пары.
Трехподвижная
сферическая кинематическая пара III
класса (![]() ,
,
![]() ,
условное обозначение
,
условное обозначение
![]() ,
рис. 1, г) с геометрическим замыканием,
низшая, допускает три независимых
относительных вращения звеньев вокруг
осей
,
,
.
,
рис. 1, г) с геометрическим замыканием,
низшая, допускает три независимых
относительных вращения звеньев вокруг
осей
,
,
.
Четырехподвижная
линейная кинематическая пара II класса
(![]() ,
,
![]() )
и пятиподвижная точечная кинематическая
пара I класса (
)
и пятиподвижная точечная кинематическая
пара I класса (![]() ,
,
![]() )
и их условные обозначения (
)
и их условные обозначения (![]() и
и
![]() ,
даны на рис. 1, д,е). Возможные
независимые относительные движения
звеньев (вращательные и поступательные)
показаны стрелками. Это высшие пары,
поскольку контакт элементов звеньев
линейный (шар в цилиндре) и точечный
(шар на плоскости). Пара
– с геометрическим замыканием, а пара
требует силового замыкания.
,
даны на рис. 1, д,е). Возможные
независимые относительные движения
звеньев (вращательные и поступательные)
показаны стрелками. Это высшие пары,
поскольку контакт элементов звеньев
линейный (шар в цилиндре) и точечный
(шар на плоскости). Пара
– с геометрическим замыканием, а пара
требует силового замыкания.
Преимуществом низших кинематических пар по сравнению с высшими является возможность передачи больших сил, поскольку контактная поверхность соприкасающихся звеньев низшей пары может быть весьма значительной. Применение высших пар позволяет уменьшить трение в машинах (пример – шариковый или роликовый подшипник), а также получить самые различные законы движения выходного звена механизма путем придания определенной формы звеньям, образующим высшую пару.