

2.3. Кольца дальности.
Предписывается иметь на экране дисплея электронные НКД для оценки расстояний, причем на шкалах 0.25, 0.5, 0.75 н. миль должно быть, по крайней мере, два, но не свыше шести НКД. На шкалах большего номинала следует иметь шесть НКД. При смещении центра развертки должны отображаться дополнительные кольца дальности с интервалом, равным интервалу между основными НКД.
Радиолокационное изображение необходимо снабжать подвижным маркером дальности в виде ПКД с индивидуальным цифровым индикатором. Допускаются добавочные ПКД. Требуется, чтобы точность измерения дистанций с помощью НКД и ПКД как при несмещенном, так и смещенном центре развертки была не хуже ±1% от значения используемой шкалы, или 30 метров, если 1% от дистанции шкалы больше этой цифры. Предписывается иметь толщину НКД не больше максимальной разрешенной толщины курсовой линии. На всех шкалах дальности наведение ПКД на объект должно производиться с требуемой точностью в течение 5 с. Установленное с помощью ПКД расстояние не должно изменяться при переключении шкал дальности.
Из Резолюции ИМО MSC.192(79).
Измерение дальностей до целей в судовых навигационных РЛС выполняется с помощью формируемых на экране ИКО колец дальности. Для грубой оценки дальности на экране ИКО формируются неподвижные кольца дальности НКД (RINGS). Это концентрические окружности вокруг собственного судна или начала развертки. Количество колец автоматически определяется выбранной шкалой диапазона, а интервал между ними указывается, как правило, в левой верхней части экрана. Сосчитайте количество колец между центром дисплея и целью. Посмотрите интервал колец дальности и оцените расстояние от цели до края ближайшего внутреннего кольца. Такой способ дает наглядную и быструю, но очень грубую оценку дальности, поэтому для точных измерений формируются подвижные кольца дальности ПКД (VRM - переводимый, как подвижный маркер расстояний). Подвижных колец два, они представлены на экране (см. рис.2.8) пунктирными окружностями, чтобы их можно было отличить от неподвижных колец. Сами ПКД отличаются друг от друга по разной длине пунктиров.
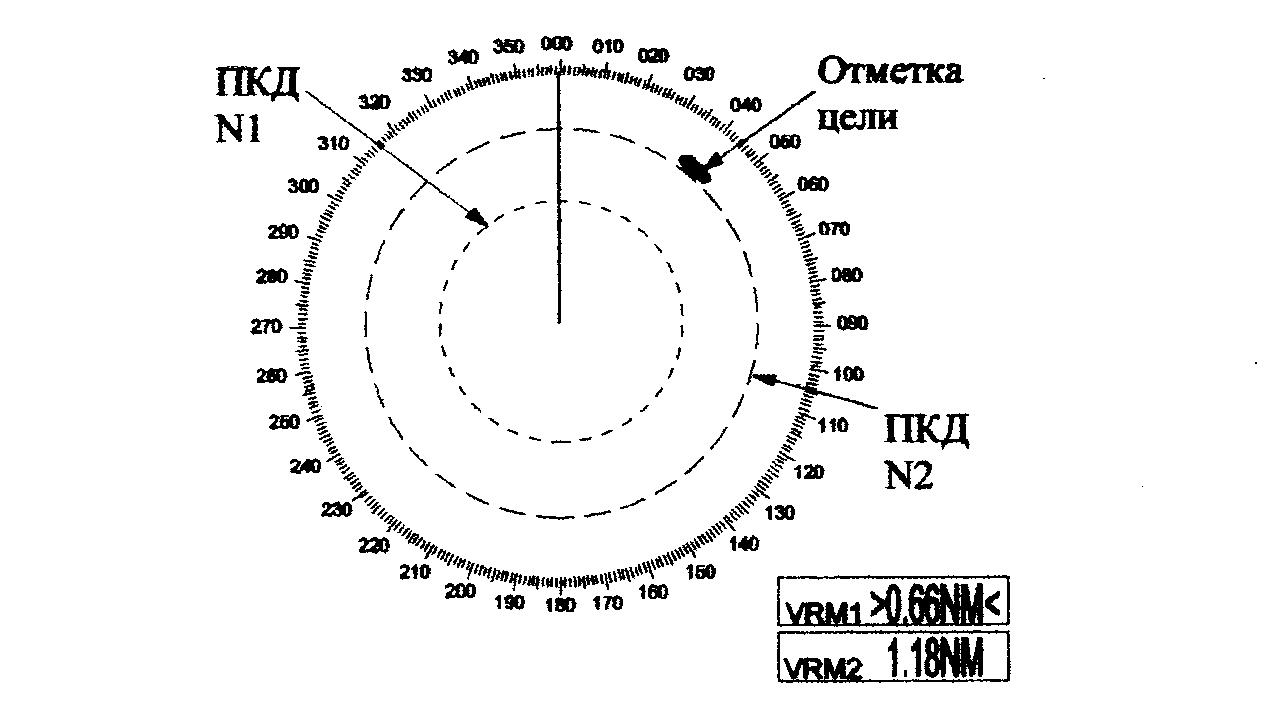
Рис.2.8 Измерение дальности при помощи ПКД
При измерении дальности ПКД подводится к внутреннему краю интересующей цели. Значение дальности, как правило, высвечивается в нижнем правом углу экрана.
Для измерения дальности современных РЛС, когда количество информации, воспроизводимой на экране ИКО, существенно увеличилось, т.к. её формирование осуществляется с помощью процессорного устройства, изменившего схемотехническое построение РЛС и их возможности, используется электронный курсор- отметка в виде перекрестия, управляемая процессором при помощи клавиши или трекбола. При выводе перекрестия на внутреннюю кромку отметки от цели искомое значение дальности вместе со значением азимута высветится в углу экрана.
2.4. Линии направления.
В РЛС должна быть электронная линия для снятия направлений (пеленгов и курсовых углов), с
индивидуальным цифровым индикатором. Она должна позволять получать в течение 5 с. направление на любой объект, где бы он ни находился на экране. Направление на цель на границе экрана должно измеряться с погрешностью, не большей ±1°.
Электронная линия для снятия направлений (ЭЛН) должна быть не толще курсовой линии и отличаться от нее. Предписывается иметь возможность изменения яркости и выключения ЭЛН. Требуется, чтобы ЭЛН поворачивалась в обоих направлениях непрерывно или с шагом, не большим 0.2°.
Направление ЭЛН должно индицироваться в градусах, а отсчет состоять, по крайней мере, из четырех знаков, один из которых после десятичной точки. Предписывается иметь возможность измерения, как пеленгов, так и курсовых углов, отсчеты которых должны отличаться.
Требуется, чтобы шкала направлений была на краю экрана и разделена через 5°, с 5 и 10-градусными отличными друг от друга делениями. Числа у делений должны быть, по крайней мере, через 30°.
Начало ЭЛН должно перемешаться с места судна в любую точку экрана и обеспечиваться возможность относительно нового начала измерять направления. Рекомендуется на ЭЛН иметь ПКД.
Из Резолюции ИМО MSC.192(79).
Для измерения направления на цель используются, формируемые на экране индикатора, электронные линии визира ЭЛВ ( EBL), или электронные маркеры измерения пеленга – что одно и то же. ЭЛВ представляет собой прямую пунктирную линию, исходящую из позиции собственного судна (т.е. не обязательно из центра экрана), к периметру радиолокационного изображения. Как правило, предусматривается две таких линии , отличающиеся длиной пунктира. На каждой ЭЛВ имеется маркер дальности (короткая черточка, пересекающая ЭЛВ под прямым углом), дальность до которой от начала координат ЭЛВ приведена в показаниях ПКД независимо от того, включено ли соответствующее ПКД или нет. Маркер дальности изменяет свое положение вдоль ЭЛВ. При совмещении маркера с серединой отметки цели на экран выводятся численные значения азимута.