

2.2 Виды ориентации изображения на экране ико.
Требуется иметь возможность ориентации изображения по норду и по курсу. Курс должен вводиться от ГК либо другого эквивалентного курсоуказателя. Погрешность согласования с компасом должна быть не больше ±0,5˚ при повороте судна со скоростью до 12˚/сек.
Из Резолюции ИМО MSC.192(79).
В морских РЛС обычно используются три вида ориентации изображения, которые судоводитель выбирает в зависимости от определенных условий плавания.
2.2.1. Режим ориентации по курсу судна, т.е. относительно диаметральной плоскости судна (режим Head – up). В данном режиме (см.рис.2.5) отметка курса всегда располагается на экране вертикально вверх и указывает на движение строго вперед. Отметка проходит через 0 шкалы азимутального круга. По этой шкале отсчитывается курсовой угол (КУ) на цели от 0 до 180˚ левого (Л.Б) или правого борта (Пр.Б). Режим применяется в стесненных районах плавания и при предупреждении столкновения судов, т.к. цели с Пр.Б. и Л.Б. располагаются также, как и при визуальном наблюдении.
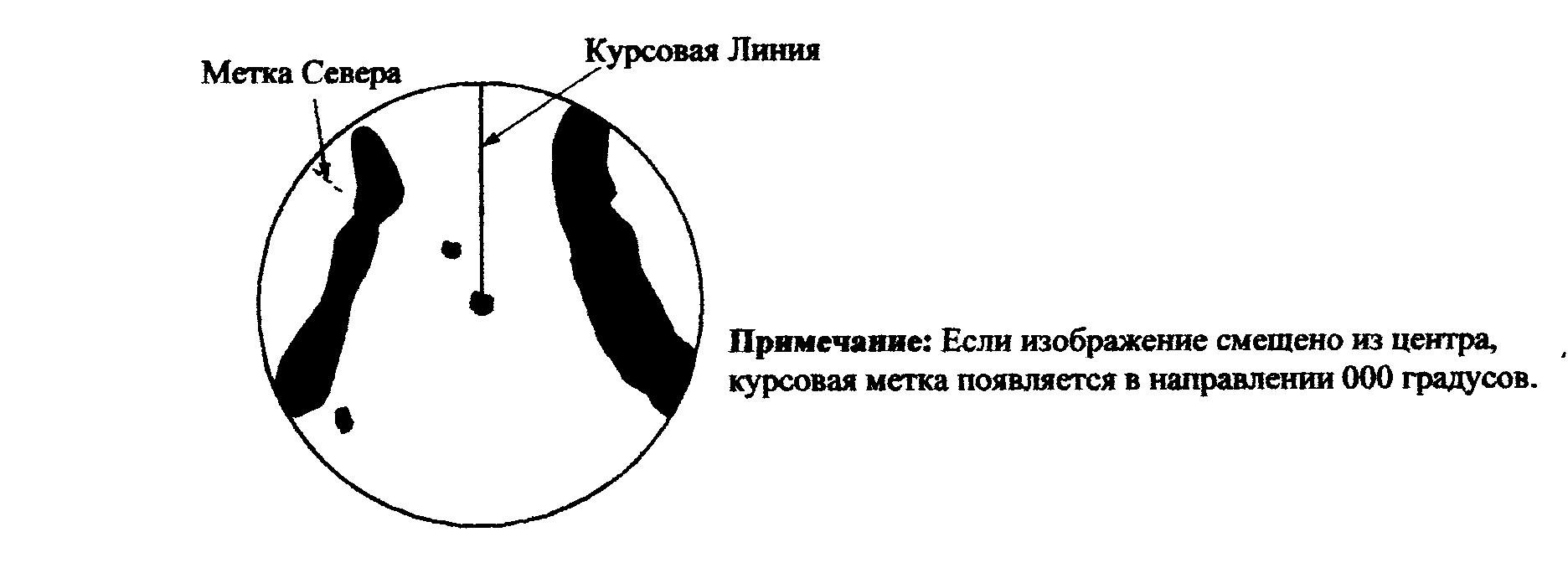
Рис.2.5. Режим по курсу судна (Head-up)
Однако, при изменениях курса судна (поворотах, рыскании) происходит разворот всего изображения на экране, в результате чего отметки от целей “смазываются”, что затрудняет измерение навигационных параметров.
2.2.2.Режим ориентации по Северу ( North – up), т.е. относительно гирокомпасного меридиана, не имеет вышеуказанного недостатка. В этом режиме отметки целей указаны по истинным (компасным) направлениям относительного собственного судна. Направление на Север (см. рис.2.6) поддерживается в верхней части экрана на 0 азимутального круга, а курсовая линия отклонена от 0 азимутального круга на угол равный гирокомпасному курсу и перемещается в соответствии с рысканиями и поворотом судна.
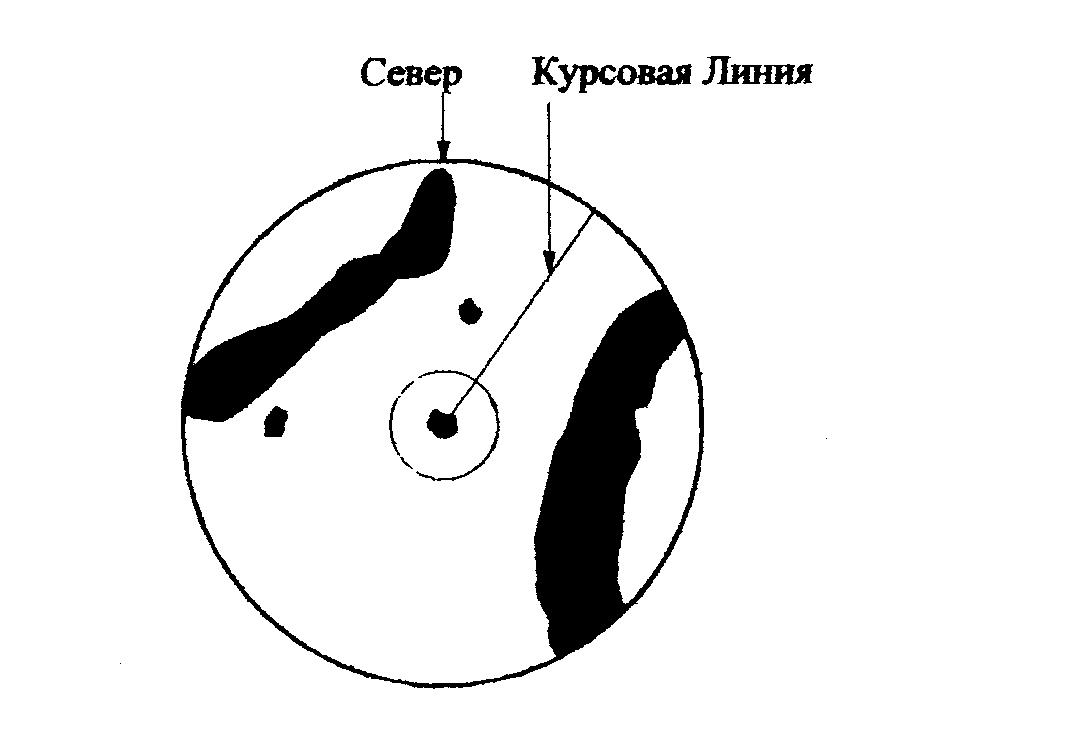
Рис.2.6. Режим ориентации по Северу (North – up)
Объекты в этом случае располагаются на экране как на навигационной карте и не смазываются при рыскании и поворотах судна. Такой вид ориентации полезен при плавании в нестесненных условиях, когда на первый план ставится задача определения места судна и расхождения с другими судами.
2.2.3. Азимутально стабилизированный курс(Course –up), (см. рис.2.7), при котором линия, соединяющая центр с верхней частью экрана, указывает назначенный курс собственного судна (т.е. направление движения собственного судна непосредственно перед выбором данного вида ориентации).
Отметки целей указаны по пеленгам относительно назначенного курса судна, который поддерживается в положении 0 градусов, Поскольку желаемое направление движения должно быть 0 градусов, то всегда можно видеть насколько судно отклонилось от заданного курса. Смазывание отметок от целей при рыскании судна в этом случае не будет. Такой вид ориентации удобен при установившемся курсе, например при переходе по прямому маршруту (GO TU – от точки к точке).

Рис.2.7. Режим ориентации по Азимутально стабилизированному курсу
(Course – up)
Метка Севера при Азимутально стабилизированном курсе располагается в ином месте азимутальной шкалы.