

8.5. Спутниковый компас
Определение направления и скорости движения в СНС навигаторах выполняется в следующей последовательности:
По сигналам НКА вычисляются координаты судна;
Фиксируется точное время, когда были определены координаты.
Выдерживается некоторый интервал времени.
Повторно определяются новые координаты судна
На основании координат двух точек и величины временного интервала вычисляется вектор скорости движения и его составляющие - направление и скорость.
Естественно, определение направления (курсоуказания) в этом случае возможно только при движении судна.
Независимое от скорости движения курсоуказание можно получить, если установить два СНС приемника с антеннами, установленными в двух точках судна на одном и том же расстоянии от ДП. Однако, более оптимальное решение найдено в установке двух или трех антенной системы, работающей на один СНС приемник. Третья антенна позволяет вместе с курсом определить углы килевой и бортовой качки, а следовательно улучшить точность измерения курса, уменьшить влияние на неё качки и рыскания. Вид трех антенной системы представлен на рис.2.22.Диаметр окружности проходящей через антенны А1, А2 и А3 примерно равен одному метру.
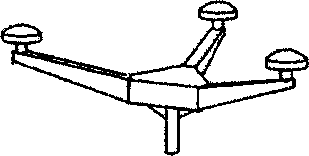
Рис.2.22. Трехантенная система спутникового компаса
Допустим, две антенны А1 и А2 судового СНС навигатора расположены в диаметральной плоскости судна (рис.2.23). Расстояние между антеннами b составляет порядка 85см.Антенны подключены к общему СНС навигатору , процессор которого вычисляет расстояние и направление на НКА от антенн А1 и А2.
По вычисленным координатам места судна и по эфемеридам НКА всегда могут быть рассчитаны его горизонтные координаты: высота h3 и азимут А3. На рис. 2.23 эти координаты показаны для одного из спутников.
Расстояния, которые проходит сигнал от НКА до антенн А1 и А2 отличаются на величину ΔD. Эта разность расстояний находится по сдвигу фазы ΔФ принимаемого сигнала антеннами А1 и А2:
ΔФ=Δ Ψ + n,
где: n –целое число циклов, уложившихся длин волн (например,применительно к GPS при частоте сигнала F1=1575,42 МГц длина волны будет ~ 19см);
ΔΨ – дробная часть цикла.
Фазовым измерениям присуща многозначность, поэтому измеряется только ΔФ , а n автоматически определяется в течение первоначального периода приема сигналов.
По значению ΔФ величина ΔD находится по формуле:
ΔD= λ ΔФ,
где: λ –длина волны принимаемого сигнала ( 19 см).
Направление на спутник

Рис. 2.23. К характеристике принципа действия спутникового компаса.
Зная ΔD и высоту h3 НКА над истинным горизонтом можно найти курсовой угол q3 НКА и истинный курс судна К:
А2F = ΔD Cosh3, q3= arccos A2F/b, K= A3+q3.
Как известно, для вычисления только координат судна в двух мерном измерении (режим 2D) требуется прием и обработка сигналов не менее, чем от трех НКА, а при трех мерном измерении (режим 3D) – не менее 4-х НКА. Для вычисления истинного курса судна необходимо дополнительно принять и обработать сигнал еще от одного НКА. Дополнительный НКА необходим для расчета n циклов на начальной стадии определения навигационных параметров. Таким образом, работа спутникового компаса возможна при устойчивом приеме сигналов не менее чем от пяти НКА.
В случаях отсутствия устойчивого приема сигналов от необходимого количества НКА, прием которых может быть блокирован, например, высокими конструкциями или мостом, под которым проходит судно, многие спутниковые компасы имеют встроенные гироскопы или электронные магнитные компасы, обеспечивающие на время отсутствия сигналов от НКА непрерывное курсоуказание судна.
Наличие встроенного вибрационного гироскопа или электронного магнитного компаса позволяет обеспечивать курсоуказание при неуверенном или отсутствующем приеме сигналов от НКА независимо от того движется судно или стоит на месте.
Спутниковый компас как автономный прибор предоставляет данные о координатах судна, курсе, путевом угле, путевой скорости, углах бортовой и килевой качки.
Как правило, комплект спутникового компаса состоит из следующих узлов:
- антенный блок, состоящий из трех антенн, точно зафиксированных на жесткой платформе;
- основной блок, в состав которого входят приемный модуль, процессорный модуль для вычисления навигационных параметров по сигналам от НКА, гироскоп или электронный магнитный компас, а также панель для управления и отображения информации.
Спутниковые компасы могут использоваться вместо традиционных гирокомпасов, требовательных к техническому уходу. На работу спутникового компаса не влияют такие факторы, как скорость судна, широта местоположения, геомагнитные показатели и т.д. В отличие от традиционных гирокомпасов и магнитных компасов точность показаний спутникового компаса не зависит от силы тяжести или скорости. Более того, благодаря третьей антенне, спутниковый компас обеспечивает повышенную точность, снижая негативное влияние бортовой и килевой качке судна, а также рыскания. На рис.2.24 показан внешний вид спутникового компаса производства фирмы Furuno.

Рис.2.24. Внешний вид спутникового компаса
Отсутствие механических частей, таких как карданов подвес, избавляет от необходимости технического обслуживания компаса. Точность определения курса современных спутниковых компасов находится в пределах 0,5 …1 градус, скорость отслеживания изменения курса 25 градусов/сек.. В отличие от традиционных компасов спутниковые полностью адаптированы для работы в локальной сети Ethernet: они имеют интерфейс в формате NMEA, IEC 61162-1 для вывода данных о курсе в РЛС/САРП, АИС, ЭКНИС, в гидролокаторы, эхолоты, картплоттеры и другие устройства судна с обновлением данных через 25 мс. По высокоточным данным системы GPSи дифференциальных подсистем спутниковый компас обеспечивает выдачу скорости судна относительно дна(SOG), курса относительно дна (COG), скорости поворота (ROT), координат (широта и долгота). Время перехода в готовность после включения компаса составляет не более 3…4 минут, что является существенным преимуществом перед традиционными гирокомпасами.
Преимущество же традиционных компасов перед спутниковыми заключается в их автономности
Контрольные вопросы по главе 8:
1.Координаты какой точки на судне вычисляет приемник СНС?
2.Какие параметры определяет приемник СНС для решения навигационных задач?
3.В чем отличие спутниковых навигационных систем от систем радиосвязи?
4.В чем заключается принципиальное отличие морских СНС навигаторов от СНС навигаторов иного назначения?
5.Какие задачи навигации выполняют современные СНС навигаторы с совмещенными функциями картплоттера?
6.Какие конструктивные требования предъявляются к антенному блоку судового СНС навигатора? Какие требования предъявляются к его размещению и установке на судне?
7.Каким требованиям должен удовлетворять интерфейс судового СНС навигатора?
8.Почему официальный формат векторных карт S-57v.3 конвертируется в закрытый, внутренний формат SENC?.
9. Дать определение маршрута, формируемого СНС навигатором с функциями картплоттера.
10.Какие виды сигнализации предусматриваются в морских СНС навигаторах?
11.Какова емкость путевых журналов морских СНС навигаторов?
12. Охарактеризуйте режимы навигации GO TO, TRAC BACK, ROUTE.
13. Какие конечные вычисления выполняет путевой компьютер морского СНС навигатора?
14.Из каких функциональных составляющих состоит приемный модуль СНС навигатора?
15.Перечислите технические характеристики антенного блока СНС навигатора. За счет чего обеспечивается компенсация потерь в коаксиальном кабеле?
16.Почему выделенные антенной радиосигналы переводят в диапазон промежуточных частот?
17.Какие функции в приемном модуле СНС навигатора выполняет блок корреляции?
18.Что формирует интерфейс потребителя спутниковой навигационной системы?
19. Перечислите возможности и основные преимущества спутникового компаса перед традиционным гирокомпасом.