

Глава 2. Индикатор кругового обзора (ико) рлс.
ИКО – оконечное устройство РЛС, предназначенное для визуального отображения окружающей судно обстановки и определения местоположения наблюдаемых на экране целей.
Поскольку возможности и технические параметры навигационных РЛС во многом оцениваются по работе ИКО, а также учитывая, что воспроизводимая этим устройством информация предназначена, прежде всего, для штурмана, то целесообразнее наиболее подробно и в первую очередь рассмотреть режимы работы индикатора, его устройство, а также органы управления, используемые оператором. Следует уточнить, что в современных РЛС оконечным устройством может быть и система автоматического съёма и сопровождения целей по дальности и азимуту.
В этом случае при одновременном наблюдении окружающей судно обстановки на экране индикатора и обеспечении расчетов параметров целей в автоматическом режиме с помощью системы автоматической радиолокационной прокладки (САРП) значительно повышается эффективность, скорость и точность решения навигационных задач судоводителем. Рассмотрим основные режимы работы и технические параметры ИКО.
2.1.Виды индикации движения на экране ико.
Требуется в РЛС иметь режимы относительного и истинного движения, а также допускать смещение начала развертки не менее чем на 50% и не более чем на 75% номинала шкалы дальности. В режиме истинного движения следует обеспечить стабилизацию изображения относительно воды (моря) и грунта.
Резолюция ИМО MSC.192(79) «Требования к радиолокационному оборудованию», принятая на Ассамблее ИМО 6 декабря 2004г.
В судовых РЛС кругового обзора применяются два вида индикации: индикация относительного движения ИОД (RMD – Relative Motion Display) и индикация истинного движения ИИД (TM – True Motion).
При ИОД начало линии развертки луча, указывающее местоположение собственного судна, всё время находится в центре экрана. Во время движения судна все окружающие объекты, воспроизводимые на экране индикатора, представляются движущимися. При этом неподвижные объекты воспринимаются как движущиеся со скоростью самого судна, а подвижные объекты – с соответствующими относительными скоростями, т.е. перемещение отметок на экране от этих объектов определяется как их собственным движением, так и движением судна. Таким образом, при ИОД во время движения судна воспроизводится не истинная обстановка, которую мог бы видеть неподвижный наблюдатель, а радиолокационное изображение ситуации, движущейся относительно судна. Этот режим индикации удобно применять для решения задач на расхождение с другими судами в открытом море, при подходе к берегу, прибрежном плавании, лоцманской проводке и для предупреждения столкновения судов, если движение не интенсивное и можно избежать сближения на малое расстояние, поскольку есть свобода маневрирования, а также при ведении радиолокационного наблюдения.
В режиме ИИД собственное судно и другие движущиеся объекты перемещаются в соответствии с их истинными курсами и скоростями, а все неподвижные цели, как берега, буи, неподвижные морские установки и т.п., представлены стационарными эхосигналами. Однако, это в полной мере возможно, когда развертка луча стабилизирована относительно грунта (по курсу и скорости). При стабилизации относительно моря, если не введены значения направления и скорости течения, неподвижные объекты могут незначительно смещаться по экрану. Такой режим индикации удобен при плавании в узкостях и большом скоплении судов (в стесненных волах), а также при лоцманской проводке и в прибрежном плавании. Преимущество ИИД в непрерывной индикации курсов других судов и своевременном обнаружении их изменения независимо от маневрирования собственного судна. При ИИД вследствие неподвижности береговой черты на кране она изображается более четко и ярко.
Поскольку в режиме ИИД начало развертки перемещается по экрану в соответствии с движением собственного судна, то необходимо периодически возвращать начало развертки в исходную точку. Эту задачу выполняет вычислительное устройство РЛС, преобразующее данные о курсе и скорости собственного судна в сигналы, смещающие начало развертки. В современных РЛС, когда собственное судно достигает точки 75% от радиуса экрана, оно автоматически сбрасывается в точку 75 % радиуса, противоположную продолжению курсовой линии, проходящей через центр экрана (см. рис.2.4).
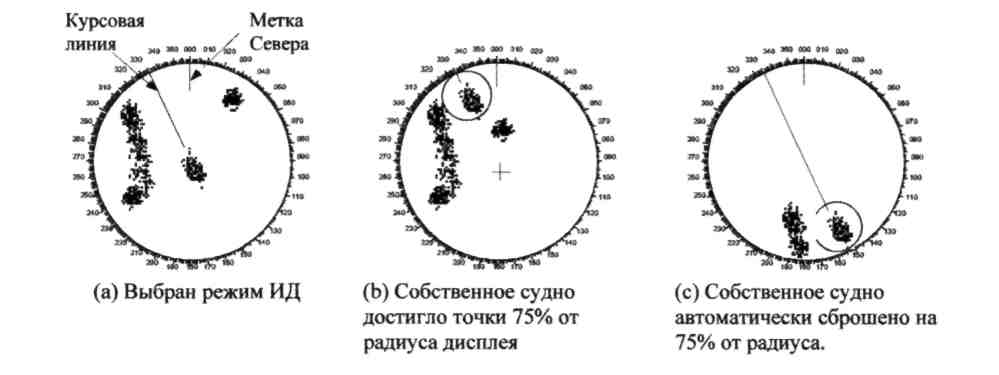
Рис.2.4. Автоматический сброс метки собственного судна в режиме ИИД.
Во многих станциях возможен сброс метки вручную, с режима ИИД на режим ИОД по стабилизированному курсу. Следует учесть, что режим ИИД в основном используется на шкалах дальности до 12 м.миль.