

Глава 5. Методы определения навигационных параметров
В процессе достаточно длительного использования спутниковых навигационных систем определены два оптимальных метода определения навигационных параметров:
- дальномерный или псевдодальномерный метод для определения пространственных координат объекта;
- радиально-скоростной или псевдорадиально-скоростной для определения составляющих скорости объекта.
Суть дальномерного метода в достаточной мере для понимания рассмотрена в главе 3 «Общие принципы решения навигационных задач».
Радиально-скоростной метод основан на измерении трех радиальных скоростей перемещения НКА относительно объекта. На практике для измерения радиальных скоростей используется эффект Доплера, сущность которого заключается в том, что при быстром перемещении НКА, излучающего колебания строго определенной частоты fo, наблюдатель на Земле (на судне) будет принимать колебания другой частоты f.
Разность этих колебаний, называемая доплеровским смещением частоты и определяется по формуле:
Fd =f –fo = ν∙cosα/λo (2.5)
Где: ν- скорость движения НКА по орбите;
α - направление на судно с НКА;
λo- длина волны, соответствующая частоте fo.
Так как ν∙cosα = νр- радиальная скорость НКА, то
Fd =νр/λо (2.6)
ЕслиFd = сопst, то а — сопst и νр = соnst. Углу α = сопst в пространстве соответствует
изоповерхность в виде кругового конуса, вершина которого совпадает с местом НКА, а ось - с вектором его скорости (рис. 2.12). В принципе, возможен и для определения координат. Но для этого во-первых, СНС приемник должен иметь высокостабильный эталон частоты во избежание дополнительных погрешностей при измерении доплеровского сдвига; во-вторых, в среднеорбитальных СНС использование метода осложняется из-за медленного изменения радиальной скорости НКА По этой причине в СНС ГЛОНАСС и NAVSTAR радиально скоростной метод применяется только для определения составляющих скорости потребителя.
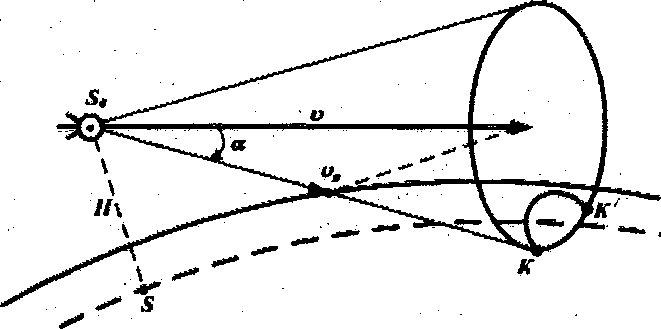
Рис. 2.12. Радиально-скоростной метод получения навигационной функции
Так как судно находится на Земле, то его место надо искать на кривой КК', по которой конус пересекается с поверхностью Земли. Эта кривая - изодопа - изолиния на поверхности Земли, характеризующаяся постоянством доплеровского смещения частоты и постоянством радиальной скорости НКА.
Изодопа по своей форме близка к сферической гиперболе.
Перемещение НКА приводит к перемещению изодоп. Точка их пересечения - место судна. Для определения места судна требуется несколько изолиний - изодоп. Вторую и последующие изодопы получают вскоре после первой.
Изодопы пересекаются в двух точках (т.К и т. К') лежащих по разные стороны трассы НКА. Подобная двузначность разрешается с помощью счисления пути судна.
Контрольные вопросы по главе 5.
В чем заключается псевдодальномерный метод определения пространственных координат объекта?
Какие параметры объекта определяются с помощью псевдорадиально-скоростного метода?
Что такое «изодопа»?