

Глава 2.Общие принципы решения навигационных задач
Навигационной задачей в СНС принято называть нахождение пространственно-временных координат потребителя и составляющих вектора его скорости, в совокупности называемых вектором потребителя. В результате решения навигационной задачи в общем случае должны быть найдены пространственные координаты потребителя (х, у, г}, поправка t к шкале времени потребителя относительно шкалы времени СНС и составляющие вектора скорости как производные от координат потребителя во времени.
Решение этих задач возможно в случае выполнения СНС следующих основных принципов:
2.1 Местоопределение по расстояниям до НКА.
2.2 Измерение расстояний до НКА..
2.3. Обеспечение точной привязки по времени.
2.4. Определение положения НКА в пространстве.
2.5. Компенсация погрешностей.
Рассмотрим подробнее каждый из них.
Местоопределение по расстояниям до НКА.
Вполне очевидно, что в основу этого принципа заложен дальномерный метод определения координат, как потенциально самый точный метод. Это означает, что координаты объекта определяются на основе измеренных расстояний от объекта до 3-х НКА, где НКА в этом случае являются опорными точками отсчета с известными координатами. Однако, применение быстро перемещающихся в свободном пространстве НКА для навигационных целей возможно лишь в том случае, если их пространственные координаты относительно Земли будут всегда известны на момент измерения навигационных параметров. Уточним суть дальномерного метода (см. рис.2.5)
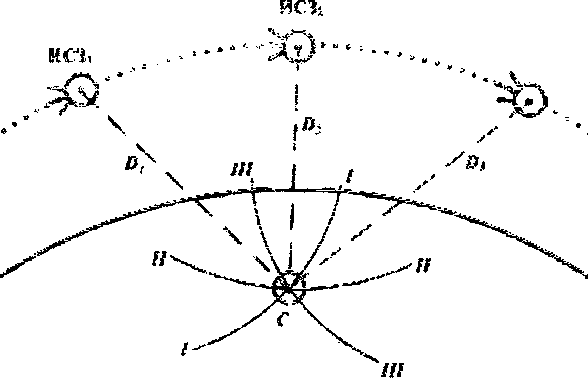
Например, от нашего судна (точка С) до НКА1 (на рисунке он обозначен как ИСЗ1) измеренное расстояние равно D1. Это значит, что мы находимся на воображаемой сфере радиусом D1 c центром, совпадающим с ИСЗ1 (линия положения І-І) Если одновременно расстояние до спутника ИСЗ2 составляет D2 (линия положения ІІ – ІІ) то это ещё больше сократит пространство, где может находиться наше судно. Так как единственная область, где судно будет на расстоянии D1 от спутника ИСЗ1 и D2 от спутника ИСЗ2 будет окружность, образованная пересечением двух сфер с линиями положения І-І и ІІ-ІІ. Если в это же время будет измерено расстояние D3 до третьего спутника ИСЗ (линия положения ІІІ – ІІІ), то возможное местоположение судна будет сведено к двум точкам. Эти точки там, где сфера радиусом D3 пересекается с окружностью, получившейся от пересечения сфер с радиусами D1 и D2.
Обычно, одна из двух точек – неправдоподобное решение (мы на море, а точка на суше), которое автоматически исключается из определения местоположения вычислительным устройством СНС приемника. Кстати, на рисунке 2-ая (неправдоподобная) точка не показана: её показ существенно усложнил бы рисунок. И ещё одно уточнение. Для судна одно из спутниковых измерений можно исключить, т.к. одна из сфер может быть заменена на сферу с центром в центре Земли и радиусом равным радиусу Земли плюс высота от поверхности моря до антенны СНС приемника.
Таким образом, координаты местоположения (широта, долгота и высота) вычисляются в СНС с помощью дальномерного метода по измеренным расстояниям до НКА.
Измерение расстояний до НКА
Расстояние есть скорость, умноженная на время движения. Так как скорость распространения радиоволн известна и постоянна, то СНС достаточно измерить время, за которое радиоволна проходит путь от НКА до антенны приемного устройства. Следовательно, если точно определить момент времени начала излучения антенной НКА радиосигнала и момент времени, в который этот сигнал «дошел» до входа приемной антенны, то задача измерения расстояния от НКА до СНС приемника будет решена. Учитывая, скорость света, с которой распространяется радиоволна (300000 км/сек) и сравнительно малое расстояние (около 20000 км), необходимы очень точные часы для измерения очень малых временных интервалов. Поэтому СНС строятся с применением совершенного способа измерения времени, основанного на атомном стандарте частоты.
Поэтому важнейшим элементом каждого НКА являются рубидиевые и цезиевые атомные стандарты частоты («часы»). Например, НКА NAVSTAR несут на борту два рубидиевых стандарта частоты со стабильностью 5∙10‾ и два цезиевых со стабильностью 2∙10‾ . На борту НКА ГЛОНАСС установлены цезиевые стандарты частоты. Несмотря на то, что бортовые «часы» сами по себе чрезвычайно точны, их показания периодически корректируются с Земли по системному времени, имеющему на порядок более высокую стабильность.
Не сложно предположить, что основной трудностью при измерении времени прохождения радиосигнала является выделение момента времени его излучения. Для этого в СНС предусмотрена жесткая синхронизация времени, заключающаяся в генерировании временного кода НКА и СНС приемником в одно и то же время. Поскольку коды времени сформированы в одно и то же время, то излученный НКА код поступит на вход приемника с запаздыванием, равным времени прохождения сигнала от НКА до приемника. По сдвигу одного кода по отношению к другому вычислительное устройство приемника определяет совершенно точно время прохождения сигнала по трассе «НКА-ПРИЕМНИК». Преимуществом использования кодовых последовательностей является то, что измерения временного сдвига могут быть проведены в любой момент времени.
Таким образом, для того, чтобы точно измерить расстояние от НКА до приемника, НКА и приемник должны генерировать один и тот же код строго одновременно в общей шкале времени. Время, которое потребовалось сигналу, чтобы пройти расстояние от излучателя до приемника, определяется путем сравнения запаздывания кода НКА по отношению к коду приемника.
Обеспечение точной привязки по времени.
Всё было бы хорошо, если бы шкалы времени в СНС имели абсолютное совпадение. Не трудно подсчитать, что при расхождении бортовой шкалы времени НКА и шкалы приемника всего на 0,01 сек, погрешность в измерении расстояния будет в 3000 км. На борту НКА – высокостабильные атомные стандарты частоты и времени, точность которых, как указано выше, составляет наносекунды. В приемнике же шкалу времени определяет обычный кварцевый опорный генератор, стабильность частоты которого на несколько порядков ниже стабильности бортовых атомных стандартов. Т.е. в приемниках СНС находятся, по сути, обычные кварцевые часы.
Решение такой, казалось бы, сложной проблемы найдено в несложном техническом решении: в измерении расстояния дополнительно ещё до одного НКА вместо трех необходимых измерений, определяющих положение точки в трех мерном пространстве. В этом случае четыре неточных измерения (с“несовпадающими” часами) позволяют исключить относительное смещение шкалы времени приемника. И вот каким образом (см. рис 3.6).Предположим, что судно (точка О) находится в 0,05 сек от ИСЗ1 и в 0.06 сек от ИСЗ2. Для определения координат судна (широты и долготы) этих двух измерений было бы достаточно. Допустим, часы приемника СНС, установленного на судне, отстают на 0.01 сек. Тогда приемник вычислил бы, что расстояние до ИСЗ.1 составляет 0.06 сек, а до ИСЗ.2- 0.07 сек. В результате появятся две новые окружности, пересекающиеся уже в другой точке (на рис. 2.6, точка 2) Вводим ещё одно измерение. В двухмерных координатах это означает использование дополнительно третьего НКА (ИСЗ3). Предположим,( если в приемнике абсолютно точные часы) ИСЗ3 находится в 0,07 сек от истинного положения судна и все три окружности пересекаются в одной точке О.Если добавить 0,01 сек ко всем трем измерениям, то новые окружности (на рис.3.6 они выделены красным цветом), соответствующие уже не истинным дальностям, а так называемым «псевдодальностям», не пересекутся в одной точке, образуют некоторый треугольник 1-2-3 ( окрашен в зеленый цвет) и вероятное местоположение судна окажется где-то внутри него. Таким образом, не существует точки, которая может быть одновременно в 0,006; в 0,07 и в 0,08 сек соответственно от спутников ИСЗ.1, ИСЗ.2 и ИСЗ.3. Это физически невозможно.
При обработке выявленного несовпадения вычислительное устройство приемника
начинает вычитание (или прибавление) некоторого (одного и того же для всех измерений)
интервала времени, к измеренным им псевдодальностям. Приемник продолжает
корректировать время во всех измерениях до тех пор, пока не найдет решение, которое «проведет» все окружности через одну точку.
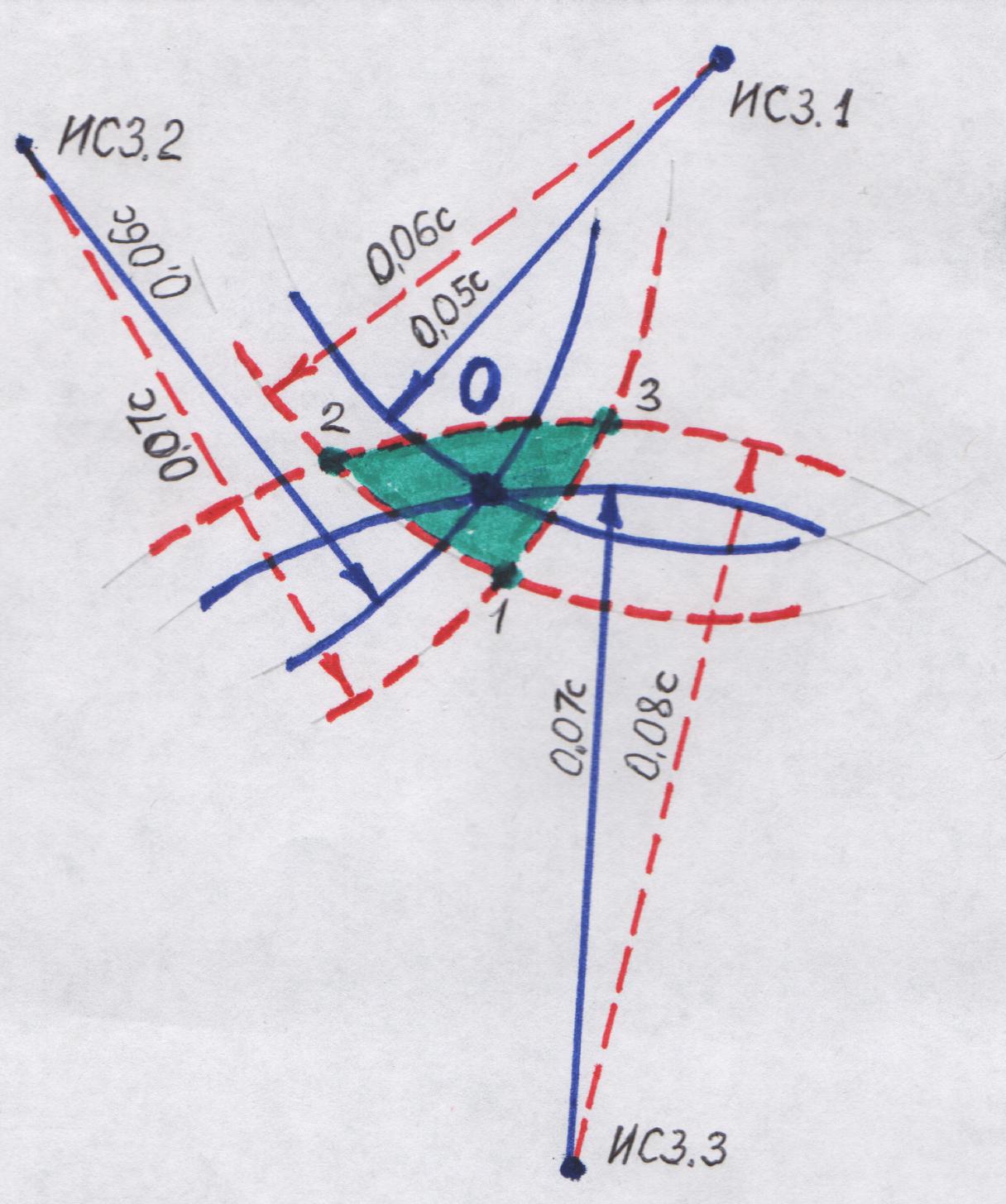
Рис. 2.6. Псевдодальномерный метод определения местоположения.
Следовательно, при трехмерном измерении координат (долготы, широты и высоты) необходима обсервация по четырем НКА, чтобы исключить погрешность шкалы времени приемника по отношению к бортовой шкале времени НКА.
Таким образом:
Точная синхронизация шкал времени в СНС – ключ к измерению расстояний до НКА.
НКА точны во времени, поскольку на них установлены атомные «часы. При этом, несмотря на то, что бортовые «часы» сами по себе чрезвычайно точны, их показания периодически корректируются по более точному атомному стандарту наземного сегмента управления СНС.
В приемниках установлены, как правило, обычные кварцевые часы, которые корректируются по бортовым часам НКА, а возможное расхождение во времени в момент измерения координат потребителя исключаются при помощи тригонометрических вычислений в самом приемнике.
Для выполнения таких вычислений необходимо произвести измерение расстояния до четвертого (дополнительного) НКА
Необходимость в проведении четырех измерений определяет вычислительное устройство приемника.
Определение положения НКА в пространстве.
NAVSTAR и ГЛОНАСС по определению и сути- глобальные радионавигационные системы. Целесообразно поэтому ещё раз уточнить, что в радионавигационных системах навигационные параметры объекта определяются с помощью радионавигационных параметров, передаваемых опорными станциями (радиомаяками), геодезические координаты которых заранее известны и определены с достаточно высокой точностью.
В СНС функции опорных станций выполняют искусственные спутники Земли (ИСЗ), имеющие по сути выполняемых задач общепринятое название НКА. Существенное отличие НКА от радиомаяков заключается в том, что координаты радиомаяков неизменны, тогда как координаты НКА, движущихся с большими и непостоянными относительно потребителя скоростями, необходимо постоянно контролировать и при необходимости корректировать.
Чтобы определить место судна по НКА, необходимо знать как расстояния до них, так и их координаты в момент определений.
Как известно, все искусственные спутники Земли вращаются вокруг неё по заранее рассчитанным и, следовательно, заданным орбитам. Но вследствие того, что Земля не совсем шар, а геоид, и того что на ИСЗ влияет ряд возмущающих сил (притяжение Луны и Солнца, давление солнечной радиации, магнитное поле Земли и др.), элементы орбиты непостоянны. Поэтому применение быстро перемещающихся в пространстве ИСЗ в качестве опорных станций для навигационных целей возможно лишь в том случае, если пространственные координаты этих станций (НКА) относительно поверхности Земли в момент измерений навигационных параметров известны с требуемой точностью.
Здесь следует указать на второе существенное отличие СНС от наземных радионавигационных систем, на наличие в СНС главной составляющей системы – наземного сегмента управления, обеспечивающего эффективную работу всего радионавигационного комплекса и требуемую точность определения навигационных параметров судна через «транзитное» звено комплекса – НКА. Таким образом, СНС можно назвать двухступенчатой системой радионавигации, при этом её первая ступень (сегмент управления – НКА) работает в режиме активного обмена информацией, суть которого, применительно к обеспечению требуемой точности навигационных параметров, состоит в следующем: НКА, проходя по трассе заданной орбиты в зоне видимости станций слежения, проверяют значения своих навигационных параметров и корректирует их. В данном случае станции слежения выполняют роль опорных станций, геодезические координаты которых неизменны и определены с исключительно высокой точностью (по фазовому центру передающей антенны). Для точного определения параметров орбит НКА станция излучает специальный запросный сигнал, который при помощи бортового ретранслятора (по аналогии метода активной радиолокации с активным ответом) отсылается обратно. По измеренной задержке и доплеровскому сдвигу частоты этого сигнала осуществляется точное определение орбиты и скорости движения НКА. Вычисленные значения параметров передаются на НКА, где они автоматически вводятся в бортовой компьютер, заменяя в нем устаревшие данные. Таким образом, и вторая ступень системы (НКА – сегмент потребителя) работает по обновленным данным, поскольку НКА в составе радионавигационного сигнала автоматически передает приемнику данные о своем точном положении на орбите.
Компенсация погрешностей.
В реальных условиях на точность определения координат потребителя и его вектора скорости влияет ряд погрешностей, обусловленных функционированием системы. Так в системах, использующих дальномерный метод, большинство погрешностей связано со временем прохождения сигнала от источника сигнала к приемнику. Применительно к СНС источники дальномерной погрешности можно разделить на следующие группы по их происхождению:
- вносимые контрольно-измерительным комплексом сегмента управления ;
- вносимые аппаратурой НКА;
- возникающие на трассе распространения радиосигнала;
- вносимые приемником потребителя.
Первые две группы погрешностей связаны между собой и обусловлены, в основном, погрешностью при сверке и хранении бортовой шкалы времени НКА. а также погрешностью в определении параметров его орбиты. Эти погрешности непосредственно и весьма значительно влияют на определение расстояния до НКА. Например, сдвиг излучаемых меток времени на 1 мс соответствует погрешности измерения дальности в 300 км. Стабильность бортовой шкалы времени зависит от стабильности бортового эталона частоты («атомные часы»). Сдвиг бортовой шкалы через сутки после коррекции может составлять 25,4 нс для цезиевых и 108 нс для рубидиевых эталонов частоты. Требования к СНС таковы, что сдвиг бортовой шкалы должен быть не более 10 нс,
Кроме аппаратных методов повышения стабильности шкалы, применяются алгоритмические методы, основанные на известных математических моделях поведения бортовых эталонов, и позволяющие прогнозировать отклонение. Непрогнозируемые отклонения бортовой шкалы времени относительно системной могут достигать 1 нс на интервале в 1 ч. В настоящее время средствами контрольно-измерительного комплекса ведется постоянное наблюдение за бортовыми эталонами каждого НКА, и для каждого из них |рассчитывается индивидуальный алгоритм коррекции. В итоге временная погрешность обычно не превышает 3 нс.
Погрешности в определении параметров НКА и непрогнозируемые смещения НКА относительно заданной орбиты наряду с погрешностью бортовой шкалы времени, могут быть представлены, как компонент эквивалентной дальномерной погрешности (ЭДП). Для СНС ГЛОНАСС суммарная ЭДП, вносимая контрольно-измерительным комплексом и НКА по самым негативным оценкам не превышает 4,2 м. Для GPS NAVSTAR значение ЭДП составляет примерно 1,2 м.
Погрешности, возникающие на трассе распространения сигнала относятся к наименее предсказуемым и в силу этого могут значительно влиять на точность местоопределения. Атмосфера Земли способна влиять на распространение радиоволн, причем это влияние не всегда поддается прогнозированию. Рефракция радиоволн (искривление пути распространения) вносит дополнительные задержки сигнала. На распространение радиоволн влияют тропосфера, расположенная у поверхности Земли и до высоты в 12 - 18 км, и ионосфера, представляющая собой слой атмосферы от 60... 100 и до 500... 1000 км.
Рефракция сигналов НКА в тропосфере обусловлена неоднородностями и изменением диэлектрической проницаемости с высотой. Значение тропосферной рефракции зависит от факторов, влияние которых хорошо изучено и поддается прогнозу (влажность воздуха, давление, температура. На основе статистических данных, накопленных за период эксплуатации СНС, разработаны математические поправки влияния тропосферы на задержку сигнала. Тропосферная погрешность составляет не более ± 1 м.
Основная проблема при компенсации ионосферной задержки состоит в том, что значение задержки очень широко меняется в зависимости от региона, в котором расположен СНС приемник, времени суток и года, солнечной и геомагнитной активности. Значения задержки лежат в диапазоне 5...500 нс, среднее значение составляет 5... 10 нс ночью и 30...50 днем для углов места, близких к 90°. С приближением к углу маски ионосферная задержка возрастает в 2 - 3 раза. Обычно ночным влиянием ионосферы пренебрегают. Ионосферные задержки наиболее сильны на низких широтах.
Ионосферные задержки являются наибольшими из всех погрешностей и составляют порядка 10 м. Поэтому, если необходимо достичь точности определения координат с погрешностью менее 10 м, то погрешность от ионосферной задержки должна быть сведена к минимуму. В GPS NAVSTAR для этой цели применяется постоянный мониторинг состояния ионосферы, для чего используются все доступные методы, включая наблюдение за солнечной активностью, прямые и косвенные методы измерения концентрации свободных электронов в ионосфере, а также аппаратное измерение задержки сигнала на различных станциях слежения. На основании собранных данных вычисляются коэффициенты, позволяющие в приемнике потребителя смоделировать условия распространения сигнала в ионосфере. Более скромная наземная инфраструктура СНС ГЛОНАСС не позволяет в данное время организовать мониторинг ионосферной задержки в различных регионах Земли.
Наиболее распространенным методом определения и учета ионосферной задержки на стороне потребителя является двухчастотный метод измерения, основанный на эффекте рефракции сигналов в ионосфере.
Для этого НКА излучают радиосигналы на двух несущих чаcтотах L1 и L2. Эффект проявляется в том, что при распространении сигналов с разной несущей частотой вносится разная ионосферная задержка. При использовании двухчастотного метода СНС приемники измеряют дальности на двух частотах, Затем вычисляют разность задержек этих сигналов в ионосфере.
Двухчастотный метод позволяет свести ионосферную погрешность к десяткам сантиметров, но усложняет схему приемника, которая должна обеспечивать прием по двум радиочастотным каналам, и увеличивает составляющую погрешности приемного тракта, обусловленную радиошумами.
Применяемые в морской навигации приемные устройства СНС (навигаторы и картплоттеры) должны обеспечивать выполнение двухчастотного метода измерения.
На точность определения пространственно-временных координат потребителя оказывает влияние взаимное расположение НКА и потребителя. Следовательно, возникает задача выбора оптимального рабочего созвездия НКА, при котором обеспечивается заданная точность измерений. Существует такое понятие, как коэффициент геометрии Ка, или так называемый геометрический фактор ухудшения местоопределения GDOP –Geometrical Dilution of Precision, являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения НКА и потребителя. Геометрический фактор может быть представлен в виде:
Кг² = Кгп² + Кгt²,
где: КГП - пространственный коэффициент для трехмерных координат (PDOP- Position Dilution of Precision);
Кгt – временной коэффициент (TDOP – Time Dilution of Precision)
Пространственный коэффициент геометрии, в свою очередь, можно разделить на две составляющие, характеризующие точность определения места подвижного объекта в горизонтальной и вертикальной плоскостях:
Кгп² = Кгг² = Кгв²,
где: КГГ - горизонтальный ( HDOP –Horizontal Dilution of Precision) коэффициент для двухмерных координат;
КГВ- вертикальный (VDOP – Vertical Dilution of Precision) коэффициент для вертикальных координат.
Так как наиболее важной характеристикой является точность определения координат места судна, то в оценке его точности наиболее часто используются Кгг ( HDOP)
В случае судовождения минимальное значение КГГ = 1,63 достигается тогда, когда один НКА находится в зените, а три других равномерно расположены в горизонтальной плоскости.
Конфигурация орбитальной группировки GPS NAVSTAR такова, что она с вероятностью 0,999 обеспечивает в глобальном масштабе видимость в любой момент времени четырех и более НКА. При этом четыре НКА обеспечивают PDОР < 6, HDOP=1.5, а VDOP = 2,2
Значения геометрических факторов, обеспечиваемых орбитальной группировкой ГЛОНАСС и вероятности видимости PN заданного числа НКА приведены в таблице 2.2.
Геометрические факторы в СНС ГЛОНАСС Таблица 2.2
Геометрические факторы |
Значения |
факторов при числе видимых НКА |
||||
4 |
5 |
6 |
7 |
8 |
9 |
|
PN |
1 |
1 |
1 |
1 |
0,91 |
0,58 |
НDOP |
1,41 |
1,26 |
1,5 |
1,03 |
0,95 |
0,89 |
VDOP |
2,0 |
1,75 |
1.7 |
1,61 |
1,6 |
1,55 |
TDOP |
1,13 |
1,03 |
1,03 |
0,95 |
0,93 |
0,91 |
PDOP |
2,45 |
2,16 |
2,05 |
1,91 |
1,86 |
1,79 |
GDOP |
2,69 |
2,39 |
2,3 |
2,13 |
2,08 |
2,01 |
Для определения координат судна с использованием GPS NAVSTAR при работе по трем НКА НDОР имеет минимальное значение (Г = 1,45), если все 3 НКА размещены одинаково низко над горизонтом, образуя равносторонний треугольник с ΔA ~ 120°.
Погрешность обсервации пропорциональна величине Г (см. рис.2.7 ).
Величина Г вычисляется при обсервациях один раз в течении 5…10 минут.
Для точных обсерваций 1,5 < Г< 5. При Г> 10 место получается менее точно.
Если на дисплее судового GPS навигатора вместо цифрового значения Г высвечивается его буквенная характеристика, то это означает:
А - высокая точность;
В — хорошая точность;
С =- удовлетворительная точность;
Д- плохая
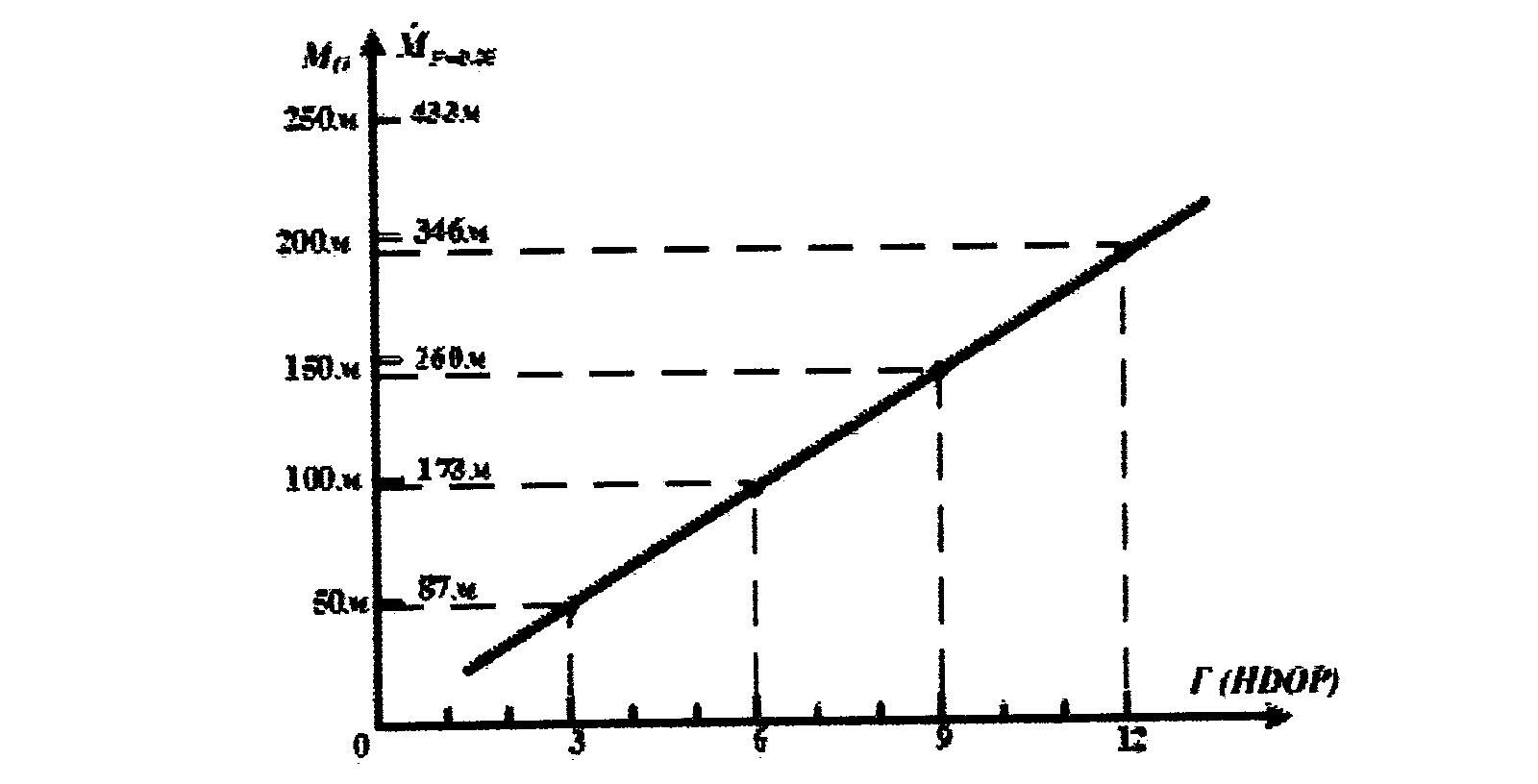
Рис. 2.7 Погрешность обсервации по GPS NAVSTAR
Объявленная точность GPS NAVSTAR для режима C/A- М0 -100 м (Р= 0,95), а для режима Р - М0 =50 м(Р=0,95) и практика подтверждает эти точности. При применении 2-х частотных приемных устройств и исключении в этом случае ионосферной погрешности точность определения координат будет значительно выше объявленной.
Следует иметь в виду, что при использовании GPS NAVSTAR, могут иметь место погрешности из-за несоответствия геодезической основы карты и параметров референц-эллипсоида, принятого для расчета в судовом GPS навигаторе.
Поэтому перед нанесением обсервованной точки на путевую МНК, полученные с GPS навигатора координаты широты и долготы должны быть исправлены поправками на расхождение геодезических систем судового GPS навигатора и путевой МНК.
Поправки к координатам даются на карте в следующей форме:
- для перехода от WGS-84 к карте: Δφ= 0,05' к S; Δλ = 0,09' к Е.
(Во многих типах судовых GPS навигаторов есть программы пересчета координат из геодезической системы GPS навигатора WGS-84 в геодезическую систему карты).
Таким образом:
Результирующая погрешность СНС определяется суммой погрешностей от различных источников. По имеемым данным по системе GPS NAVSTAR эти погрешности составляют:
погрешности шкалы времени (~ ± 0,6 м);
погрешности вычисления орбит (~ ± 0,6 м);
инструментальной погрешности приемника (~ ± 1,2 м);
многолучевости распространения сигнала (~ ± 2,0 м);
ионосферной задержки сигнала (~ ± 10,0 м);
тропосферной задержки сигнала (~ ± 1,0 м);
геометрического расположения спутников (см. коэффициент HDOP)
Однако, за счет применения в современных СНС новых схемотехнических решений и математического моделирования погрешности 5 и 6 практически могут быть устранены. Погрешность 4, обусловленная многолучевостью распространения сигнала, в морских условиях может быть значительно меньше указанного значения и определяется состоянием морской поверхности и размещением антенны GPS навигатора на судне.
Реально, при минимальных значениях HDOP погрешность определения местоположения судна с помощью современных СНС NAVSTAR и ГЛОНАСС может составлять не более 10..15 м.
Контрольные вопросы по главе 2:
Какие навигационные задачи решает СНС?
Какие принципы заложены в основу функционирования СНС?
Какой метод используется в СНС для определения местоположения объекта?
Как в СНС решается проблема временной привязки НКА и СНС-приемника?
Как обеспечивается определение местоположения НКА в пространстве?
Перечислите виды погрешностей, влияющих на точность функционирования СНС.
Каким образом компенсируется погрешность вносимая ионосферой?
Как сказывается на точности определения пространственно-временных координат потребителя взаимное расположение НКА?
Как Вы понимаете коэффициент геометрии или так называемый геометрический фактор ухудшения местоопределения? Большое значение коэффициента геометрии- это хорошо или плохо?
Какова погрешность местоопределения с помощью систем GPS и ГЛОНАСС при минимальном значении HDOP для двухмерного измерения (2D)?