

1.3 Сегмент управления
Сегмент управления состоит из главной станции, совмещенной с вычислительным центром; группы контрольно-измерительных станций (КИС), или станций слежения, связанных с главной станцией и между собой каналами связи; наземного эталона времени и частоты. Контрольно-измерительные станции стараются размещать как можно равномернее по поверхности Земли, сообразуясь с геополитическими факторами и экономической целесообразностью. Координаты КИС (фазового центра антенны) определены в трех измерениях с максимально доступной точностью. При пролете НКА в зоне видимости КИС, она осуществляет наблюдение за спутником, принимает навигационные сигналы, осуществляет первичную обработку информации и производит обмен данными с главной станцией. На главной, станции происходит сбор информации от всех КИС, ее математическая обработка и вычисление различных координатных и корректирующих данных, подлежащих загрузке в бортовую ЭВМ НКА.
Данные, подлежащие загрузке, подразделяются на оперативные, обновляемые при каждом сеансе связи, и долговременные. В случае возникновения нештатной ситуации возможно проведение внеплановых сеансов связи и загрузки данных при условии нахождения НКА в зоне видимости одной из КИС.
Наземный эталон времени и частоты имеет более высокую точность, чем бортовые эталоны и предназначен для синхронизации всех процессов, происходящих в СНС и коррекции бортовых эталонов.
Сочетание независимости и беззапросности придает СНС неограниченную пропускную способность - произвольное число потребителей может использовать сигналы СНС в любой момент времени. Расположение станций сегментов управления систем ГЛОНАСС и NAVSTAR приведены, соответственно, на рис. 2.3 и 2.4.
Как видно из рисунков, сеть станций слежения СНС ГЛОНАСС выгодно отличается от аналогичной сети NAVSTAR тем, что расположена только на территории своей страны. В состав сегмента управления ГЛОНАСС кроме станций слежения и центра управления системой входят кванто - оптические станции (одна из них расположена на территории Узбекистана), предназначенные для периодического высокоточного измерения дальности до НКА при помощи лазерного дальномера. Такая станция позволяет измерять дальность до объектов на высотах до 40 000 км. Дальномерная ошибка станции не превышает 1,5…1,8 см, а угломерная от 0,5” до 2”. Естественно, для эффективной работы кванто-оптических станций требуется хорошая оптическая видимость в ночное время, поэтому они, как правило, применяются не при систематическом наблюдении за НКА, а для юстировки радиодальномерных каналов.
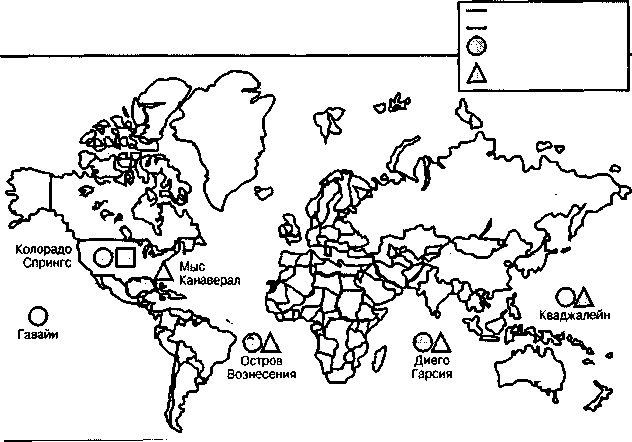
□- Главная станция ○ - Станция наблюдения Δ -Наземная антенна
Рис. 2.4.Расположение наземных станций сегмента управления СНС NAVSTAR
1.4 Сегмент потребителей
Сегмент потребителей можно условно разбить на три части: военные организации, гражданские организации, частные лица. Поскольку СНС являются беззапросными системами, то количество потребителей системы не имеет значения. Независимо от назначения потребительского оборудования, в нем присутствуют радиочастотный тракт, в котором происходит прием радиосигналов НКА и их первичная обработка, и вычислитель, предназначенный для вторичной обработки сигнала, выделения навигационной информации, реализации алгоритма выбора оптимального созвездия и вычисления пространственных координат и вектора скорости потребителя. Обычно сначала определяются текущие координаты НКА и дальности до них, затем вычисляются географические координаты потребителя. Вектор скорости потребителя вычисляется путем измерения доплеровских сдвигов частоты НКА при известных векторах скорости спутников. Для некритичных транспортных применений вектор скорости может рассчитываться по разности координат в два фиксированных момента времени. Далее, в зависимости от назначения приемника, информация может поступать на устройство отображения, в канал передачи, либо на блок управления внешними исполнительными механизмами.
В соответствии с областью применения конструкции и возможности приемников СНС могут значительно отличаться. Например, во многих приемниках для частного применения не предусмотрено измерение высоты и вычисление составляющих вектора скорости в режиме реального времени, тогда как в специализированных приемниках, используемых в авиации и судовождении, эти измерения обязательны. В системах мобильных коммуникаций, а также для проведения различных технических измерений и научных экспериментов часто требуются СНС приемники, единственной задачей которых является получение сигналов точного времени и образцовой частоты.
В настоящее время в силу ряда причин наибольшее применение в мире имеет система NAVSTAR, чаще именуемая как GPS. Поэтому все приемники системы ГЛОНАСС принимают также сигналы GPS, но не все приемники GPS принимают сигналы ГЛОНАСС.
Контрольные вопросы по главе 1:
1.Что означают термины «доступность», «целостность» и «непрерывность обслуживания»?
2. Какие три сегмента формируют структуру СНС?
3.Каие функциональные дополнения входят в состав СНС?
4. Какую главную роль выполняют НКА? Какое должно быть количество НКА, чтобы обеспечить полное функционирование СНС?
5. Почему высота обит НКА выбрана примерно 20000 км?
6. Почему угол наклона плоскости орбит НКА по отношению к экватору составляет примерно 60˚?
7. Какую главную задачу выполняет сегмент управления СНС? Что входит в состав сегмента управления?
8.Что собой представляет сегмент потребителя?