

1.2. Космический сегмент
Точность местоопределения и стабильность функционирования СНС в большой степени зависит от взаимного орбитального расположения спутников и от параметров их сигналов. Как правило, требуется, чтобы в зоне видимости потребителя находились не менее 3-5 НКА. На практике орбитальная структура строится таким образом, что для большинства потребителей постоянно видны более 6 НКА и потребитель имеет возможность выбирать оптимальное созвездие по определенному алгоритму, заложенному в вычислитель приемника. Кроме действующих НКА, завершенная СНС имеет в своем составе несколько резервных спутников, которые могут быть оперативно введены для замены вышедших из строя либо для увеличения степени покрытия определенного региона. Действующие НКА могут быть перегруппированы (в ограниченных пределах) по команде с наземной станции управления. Действующие в настоящее время средневысотные орбиты с высотой около 20 000 км позволяют принимать сигналы каждого НКА почти на половине поверхности Земли, что обеспечивает непрерывность радионавигационного поля и достаточную избыточность при выборе оптимального созвездия НКА. Системы GPS и ГЛОНАСС часто называют сетевыми СНС, поскольку принципиальное значение для их функционирования имеет взаимная синхронизация НКА по орбитальным координатам и параметрам излучаемых сигналов, т.е. объединение группы НКА в сеть.
Основное назначение НКА - формирование и излучение сигналов, необходимых для решения потребителем задачи позиционирования и контроля исправности самого НКА. Каждый НКА передает следующие данные:
-свой статус (сообщение об исправности или неисправности);
-текущую дату;
- текущее время;
- данные альманаха ( орбитальные данные всех НКА);
- точное время отправки всей совокупности сообщений;
- бортовые эфемериды (расчетные координаты своего положения в этот момент
времени).
В состав стандартного НКА входят: радиопередающее оборудование для передачи навигационного сигнала и телеметрической информации; радиоприемное оборудование для приема команд наземного комплекса управления; антенны;
бортовая ЭВМ; бортовой эталон времени и частоты: солнечные батареи; аккумуляторные батареи; системы ориентации на орбите и т.д.
Современные НКА могут нести сопутствующее оборудование, такое как детекторы для обнаружения наземных ядерных взрывов и элементы систем боевого управления.
Излучаемые НКА сигналы содержат дальномерную и служебную составляющие. Дальномерная составляющая используется потребителями непосредственно для определения навигационных параметров - дальности до НКА, вектора скорости потребителя, его пространственной ориентации и т.п. Служебная составляющая со-держит информацию о координатах спутников, шкале времени, векторах скоростей НКА, исправности и т.д. В основном служебная информация готовится командно-измерительным комплексом и закладывается в бортовую память НКА во время сеанса связи. И лишь незначительная ее часть формируется бортовой аппаратурой. Процедура переноса служебной информации из командного комплекса в память бортовой ЭВМ часто называется загрузкой данных.
В орбитальных структурах космических сегментов систем ГЛОНАСС и NAVSTAR имеются некоторые различия, которые для наглядности сведены в таблицу 2.1.и показаны на рис.2.2.
Таблица 3.1.
-
Показатель
ГЛОНАСС
NAVSTAR
Число НКА в полной системе
24
24
Число орбитальных плоскостей
3
6
Число НКА в каждой плоскости
8
4
Наклонение орбиты,0
64,8
55
Высота орбиты, км
19130
20180
Период обращения НКА
11 ч 15 мин 44 с
1 1 ч 58 мин 00 с
Система координат
ПЗ-90
WGS-84
Масса НКА, кг
1450
1055
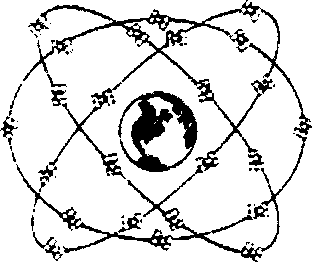
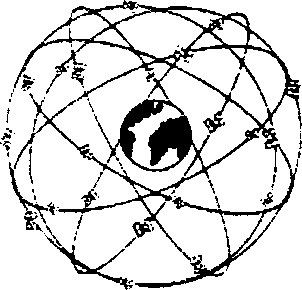
а) б)
Интервал повторяемости трасс движения НКА системы ГЛОНАСС и, соответственно, зон радиовидимости наземными потребителями составляет 17 витков или 7 суток 23 часа 27 минут 28 секунд. Следовательно, ГЛОНАСС не является резонансной (или синхронной), т.е. НКА в своем орбитальном движении не имеют резонанса (синхронизма) с вращением Земли. Начало каждого витка смещается относительно поверхности Земли приблизительно на 21˚ по долготе и орбита каждого НКА имеет многовитковый след. Благодаря этому возмущающее влияние нецентральности гравитационного поля Земли на орбиты НКА значительно снижается и является одинаковым для всех НКА. Как следствие, орбитальная группировка системы ГЛОНАСС более стабильна по сравнению с NAVSTAR. имеющей синхронные 12 – часовые орбиты. Орбитальная группировка ГЛОНАСС не требует дополнительных корректировок в течение всего срока активного существования НКА. Хотя срок функционирования НКА ГЛОНАСС на сегодняшний день меньше, чем в NAVSTAR.( Для справки: расчетный срок существования последних выведенных на орбиту НКА ГЛОНАСС составляет 7 лет; расчетный срок существования НКА MAVSTAR составляет в зависимости от их модификации составляет 12..15 лет).
Как видно из таблицы, период обращения НКА NAVSTAR составляет 11 ч 58 мин среднего солнечного времени, что соответствует 12 часам звездного времени. В своем орбитальном движении НКА NAVSTAR вращаются синхронно с Землей, т.е. не меняют своего положения относительно Земли, следовательно, на них оказывается большее воздействие гравитационного поля Земли, поэтому периодически необходима корректировка параметров орбит НКА посредством включения бортовых двигателей по команде с Земли (двигатели в этом случае расходуют очень дорогостоящее топливо). Например, автономное время функционирования космических аппаратов системы NAVSTAR, выведенных на орбиту до 1997 года составляло всего 14 дней. Через 14 дней погрешность местоопределения на поверхности Земли могла достигать 425 метров, если бы не выполнялась корректировка орбиты. НКА нового поколения могут сохранять устойчивое функционирование системы в течение 180 дней с постепенным снижением точности . Это стало итогом многолетнего накопления статистических данных по результатам эксплуатации системы, их обработки и ввода в вычислительный комплекс и взаимного обмена данными данными между НКА. С другой стороны, построение орбитальной структуры системы NAVSTAR обеспечивает постоянство прохождения НКА над одними и теми же точками поверхности Земли в одно и то же время ровно 2 раза в сутки.
В СНС ГЛОНАСС и NAVSTAR применяются круговые орбиты. При использовании круговых орбит спутники движутся с постоянной угловой скоростью, что значительно упрощает расчеты и прогнозирование их координат в приемниках потребителей и наземных контрольных станций. Для движения спутника по круговой орбите необходимо, чтобы возникающая центробежная сила была равна силе тяготения, или, иначе чтобы начальная скорость соответствовала круговой скорости Vкр на заданной высоте HА и была направлена перпендикулярно радиус-вектору r =RЗ+ HА, где : RЗ – радиус Земли. Для СНС ГЛОНАСС и NAVSTAR Vкр ≈3,95 км/c.(Как известно, первая космическая скорость равна 7,91 км/с, а для вывода спутника на эллиптическую орбиту необходимо ускорить его до второй космической скорости, равной 11,2 км/с).
Почему угол наклона плоскости орбит НКА по отношению к плоскости экватора выбран близким к 60˚ ( 64,8˚ у ГЛОНАСС и 55˚ у NAVSTAR)? Дело в том, что в реальных условиях при движении спутника по околоземной орбите на него кроме притяжения Земли, воздействуют разнообразные дополнительные силы, называемые возмущающими:
- притяжение Луны и Солнца;
- давление светового излучения Солнца (‘солнечный ветер”);
- неравномерность гравитационного поля Земли;
- сопротивление среды при движении спутника.
Они малы по сравнению с центральной силой притяжения, но их длительное воздействие приводит к отклонению орбиты спутника. Поскольку точность определения местоположения НКА на орбите чрезвычайно важна для определения навигационных параметров, то возмущениями орбиты пренебрегать нельзя. Практические исследования показали, что суммарное воздействие вышеуказанных возмущений минимально при наклонении плоскости орбиты под углом 63˚ 29́ 06˝ или 116˚ 35΄54˝ к плоскости экватора. Наклонные орбиты под углом ≈60˚ имеют компромиссную стабильность параметров, особенно высока стабильность перигея, характеризующего положение орбиты в орбитальной плоскости и период обращения.
В заключение следует отметить, что выводимые Россией с начала 2007 года на орбиту НКА новой модификации ГЛОНАСС-К имеют срок службы 10…12.лет, масса НКА – 750 кг.
Эти аппараты в обычном режиме обеспечивают точность определения координат с погрешностью не более 6…8 м при вероятности 0,95.

Рис. 2.3. Расположение наземных станций сегмента управления СНС ГЛОНАСС.