

Глава 6. Особенности конструктивного и схемотехнического построения рлс
6.1. Состав аппаратуры.
Из Правила 19 Главы 5 «Навигационная безопасность» Конвенции СОЛАС -74.
Пункт 2.3. Все суда валовой вместимостью 300 и более рег.т. и пассажирские суда независимо от размера должны иметь:
1.радиолокатор в полосе частот 9ГГц;
2. средство электронной прокладки (Electronic Plotting Aid – EPA).
Пункт 2.5.Все суда валовой вместимостью 500 и более рег.т. дополнительно к требованию пункта 2.3 за исключением подпункта 2.3.2 должны иметь средство автоматического сопровождения целей (Automatic Tracking Aid – ATA).
Пункт 2.7. Все суда валовой вместимостью 3000 и более рег.т. дополнительно к требованию пункта 2.5. должны иметь:
радиолокатор в полосе частот 3 ГГц или, если Администрация сочтет необходимым – второй радиолокатор в полосе частот 9 ГГц;
второе средство автосопровождения ( АТА).
Пункт 2.8. Все суда валовой вместимостью 10000 рег.т. и более дополнительно к требованиям пункта 2.7 за исключением подпункта 2.7.2 должны иметь
средство автоматической радиолокационной прокладки САРП (Automatic Radar Plotting Aid – ARPA).
Из Резолюции ИМО RSC.192(79).
Все РЛС, устанавливаемые на судах с 1 июля 2008 года и после этой даты должны иметь встроенные устройства автоматического сопровождения целей (АТА) для оценки навигационной обстановки. На судах валовой вместимостью до 500 рег.т. должно быть одновременное отображение и непрерывное обновление информации не менее, чем по 20 целям, а на судах валовой вместимостью более 500 и до 10000 рег.т. – до 30 целей. При этом должна быть предусмотрена возможность ручного захвата и сброса целей с относительными скоростями до 100 узлов с использованием шкал дальности 3,6 и 12 м. миль. Для судов валовой вместимостью свыше 10000 рег.т. должно быть предусмотрено средство автоматической радиолокационной прокладки САРП (ARPA) для автоматического сопровождения и обработки и непрерывного обновления информации не менее, чем по 40 целям при автоматическом и ручном захвате с использованием шкал 3, 6 и 12 м .миль.
Комментируя вышеизложенные требования, можно с полной уверенностью утверждать, что большинство требований ИМО ведущие фирмы – изготовители радиолокационного оборудования реализуют в конструктивных и схемотехнических разработках ранее сроков внедрения тех или иных требований, предусмотренных в Резолюциях. Как правило, основные технические характеристики РЛС во многих новых изделиях выше тех, что предусматриваются требованиями Резолюций ИМО. В частности, это в первую очередь относится к конструктивным и схемотехническим решениям, позволяющим уменьшить опасность столкновения судов. Так например, большинство РЛС имеют встроенные в ИКО блоки, позволяющие в зависимости от того на каком судне по водоизмещению или назначению будет установлена РЛС загружать в блок либо модуль ATA, либо модуль ARPA. Причем, эти модули, как правило, рассчитаны на обработку значительно большего количества целей, чем это предусмотрено Резолюцией ИМО RSC.192(79).
За несколько десятилетий архитектура судовых РЛС была отработана и стала практически классической. Она содержит три основных устройства: антенное (Scanner Unit), приемопередающее (Transmitter- Receiver Unit) и индикаторное (Display Unit). Эти устройства, как правило, выполнены в виде отдельных завершенных конструкций, называемых обычно приборами или блоками, соединения между которыми обеспечивается с помощью многожильных электрических кабелей, коаксиальных кабелей. Также для канализации СВЧ-энергии от передатчика к антенне могут использоваться волноводы (чаще всего в диапазоне 3.2 см).
В настоящее время всё большее применение имеет конфигурация РЛС, состоящая из двух устройств: конструктивно объединенных в один прибор антенны и приемопередатчика и отдельного индикатора кругового обзора (дисплейного устройства). Это стало возможным благодаря внедрению твердотельных СВЧ приборов, малогабаритной элементной базы, совершенствованию технологии изготовления электронных устройств на базе микропроцессоров и интегральных схем, а также значительному повышению их возможностей и качественных показателей. Совмещение антенны и приемопередатчика позволило за счет исключения антенно-фидерного тракта, а следовательно, и больших потерь СВЧ энергии при её канализации по фидеру, уменьшить импульсную мощность передатчика и повысить чувствительность приемного тракта при сохранении требуемых эксплуатационных характеристик РЛС. Совмещенный вариант комплектации РЛС, состоящей из двух устройств с уменьшенными весогабаритными показателями, особенно удобен для малотоннажных судов, катеров и яхт.
Основной вариант комплектации – антенна – приемопередатчик - индикатор используется в РЛС для судов различного тоннажа и назначения. Причем, в одной и той же серии РЛС могут использоваться различные приборы. Например, для более крупных судов согласно требованиям Резолюции ИМО RSC.192(79) должны быть ИКО с большим диаметром экрана, для повышения избирательности по направлению – антенны с большим размером излучателя и т.д.
Кроме двух вышеуказанных вариантов конфигурации могут быть и другие, что связано, например, с двухдиапазонностью РЛС или с комплектацией отдельным индикатором САРП, но это не определено обязательными требованиями ИМО.
Кроме приборов, указанных в рассмотренных выше вариантах комплектаций, в РЛС применяются дополнительные устройства для контроля работоспособности. Простейшие из них включены в состав основных приборов. Контроль по сверхвысокой частоте (СВЧ) осуществляется с помощью дополнительных небольших антенн, размещаемых на основных антеннах и связанных с приборами контроля через коаксиальный кабель или с помощью специальных устройств, в которые вводятся-выводятся .СВЧ колебания непосредственно через коаксиальный фидер.
Индивидуальность комплектации заключается также и в составе приборов электропитания. Как правило, РЛС изготавливаются на электропитание от судовой сети обычно переменного тока частотой 50…60 Гц, напряжением 220 или 380 В. Однако, бортовая сеть может быть другой. В этом случае могут потребоваться, например, трансформаторы, преобразователи, пускорегулирующие приборы и т.д. По условиям эксплуатации судна, его назначению может потребоваться дополнительный индикатор, отдельный блок управления, дополнительный блок питания к антенне и т.д. В любом случае, все, что не относится к основному варианту конфигурации системы РЛС, должно оговариваться судовладельцем при заключении контракта на поставку изделия.
На рис.2.28. показан вариант комплектации РЛС, состоящей из двух основных устройств – антенного блока с встроенным приемопередатчиком и дисплейного блока. Приведем некоторые пояснения к чтению конфигурации, указанной на рисунке.
В состав стандартной поставки входят антенный блок и блок дисплея RDP -124.
Антенный блок в данном случае имеет 12 модификаций (вариантов исполнения). Эти варианты учитывают:
- различие в импульсной мощности передатчика (15 кВт для FR-2115 и 25 кВт для FR -2125);
- различная скорость вращения антенны (24 об/мин для обычных судов и 42 об/мин для высокоскоростных судов);
- три размера длины щелевого излучателя: 1200 мм, 2000 мм и 2400 мм (длина щелевого излучателя определяет ширину диаграммы направленности в горизонтальной плоскости – чем больше длина, тем уже диаграмма направленности, а следовательно, лучше избирательность по направлению).
3. Блок дисплея RDP – 124.
Все, что помечено в нем и вокруг него пунктиром в комплект основной поставки не входит, т.е. в контракте Заказчик РЛС должен указать: а) какими модулями должен быть доукомплектован блок дисплея, б) требуется – ли стандартный интерфейс IEC-61162 для подключения навигационных датчиков (GPS, лаг, гирокомпас), в) к какой бортовой сети будет подключена РЛС, г) необходимость дополнительного дисплея или монитора.
Уточнение: средство электронной прокладки EPA, как правило, включается в основной комплект, поэтому модуль EPA в блоке дисплея не показан.
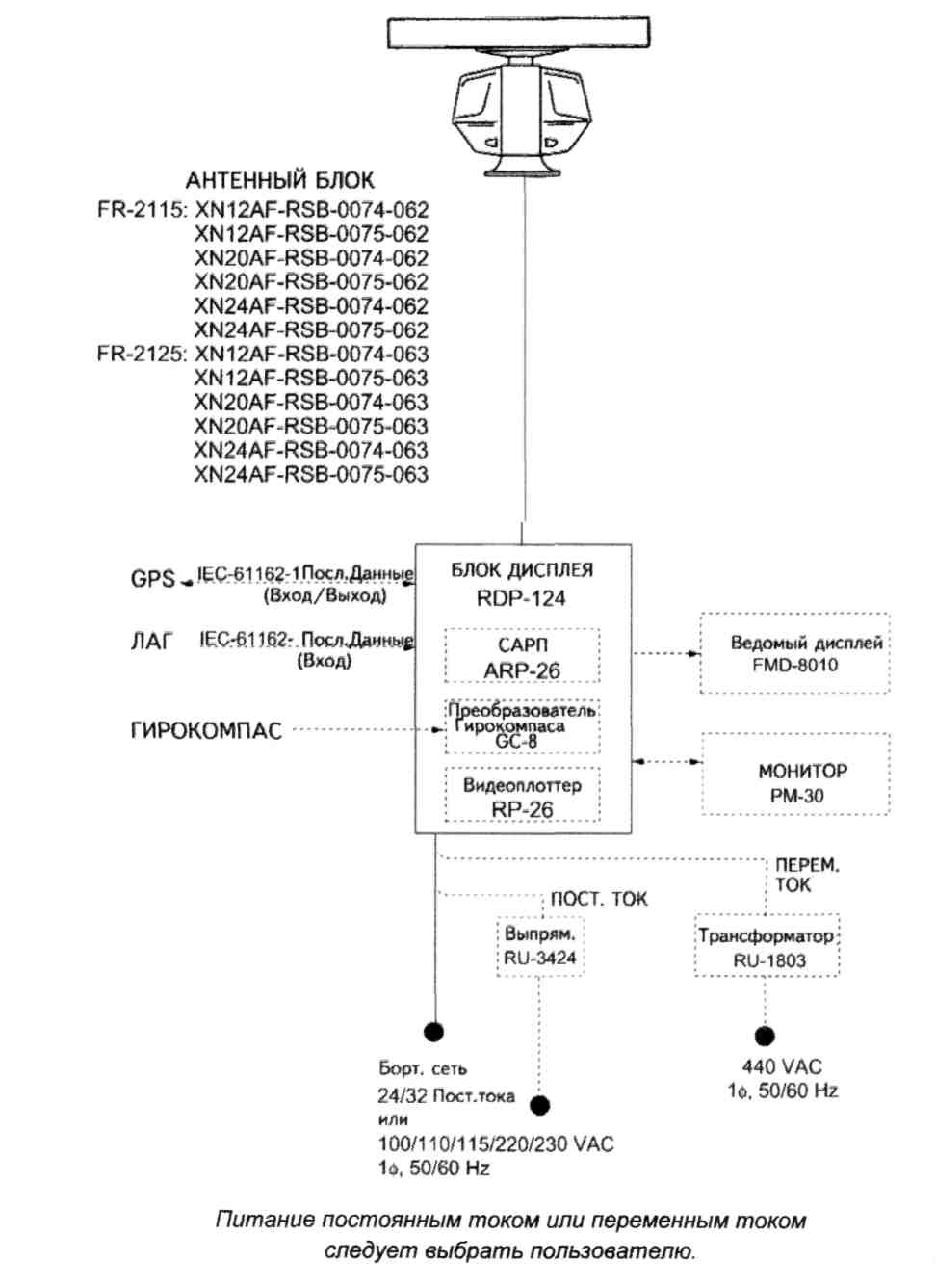
Рис.2.28. Конфигурация РЛС, состоящей из двух основных блоков.