

Немного об истории развития радионавигации
После изобретения радио и разработки конструкций направленных антенн были предприняты вполне очевидные попытки по использованию радиоволн для целей навигации, поскольку тогда же были установлены два совершенно очевидных свойства радиоволн:
- их распространение от источника к потребителю по кратчайшему пути;
- их скорость распространения в свободном пространстве всегда постоянна и равна скорости света (~300000 км/сек.).
Идея использования указанных свойств радиоволн, по сути «лежит» на поверхности.
 Допустим,
имеются два береговых объекта (см.
рис.1), на которых установлены с заранее
известными координатами радиопередатчики
А и В. На судне установлен радиоприемник
О, подключённый к антенне с направленным
действием.
Допустим,
имеются два береговых объекта (см.
рис.1), на которых установлены с заранее
известными координатами радиопередатчики
А и В. На судне установлен радиоприемник
О, подключённый к антенне с направленным
действием.
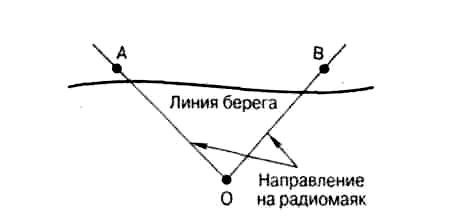
Рис.1. Определение местоположения по двум радиомаякам.
В данном случае теоретически возможны три варианта определения местоположения судна:
1. По направлениям на передатчики A и B, точка пересечения этих направлений О определит местоположение судна;
2. По измеренным расстояниям от приёмника О до передатчиков Аи В.
3. По направлению на один из передатчиков и измеренному расстоянию от приёмника до выбранного передатчика.
Рассмотрим возможность определения координат судна с помощью передачи и приема радиоволн по первому варианту. Передатчики Аи В излучают сигнал равномерно во все стороны. Антенна судового приемника имеет направленное действие, т.е. когда она определенным образом повернута в сторону передатчика, амплитуда принимаемого сигнала многократно возрастает. Теоретически, если идеально точно будут определены направления на передатчики, имеющие заранее известные координаты, то соответственно будет определено и местоположение судна на единственно возможном пересечении азимутов в точке О. К сожалению, есть одна проблема. Не существует антенн с идеальной диаграммой направленности, к тому же, чем острее направленность антенны, тем сложнее её конструкция. Кроме того, чтобы система позиционирования действовала за пределами оптической видимости, необходимо использовать достаточно длинные радиоволны, способные огибать горизонт. Но чем больше длина волны, тем больше по размерам должна быть конструкция антенны. Поэтому точность действия антенны ограничена её разумными конструктивными размерами. Погрешность определения азимута на радиомаяк (радиопередатчик), представленную в виде угла (рис.1.2,а), можно условно спроецировать во встречный угол с вершиной в позиции радиомаяка (рис.1.2,б).
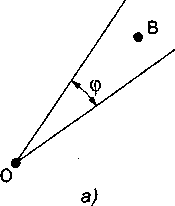
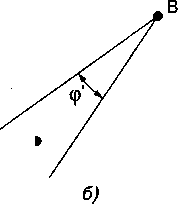
Рис.2. Погрешность определения направления на радиомаяк (а) и обратный угол погрешности определения направления (б)
Очевидно, что с учётом определения погрешностей азимутов, вместо точных координат мы получаем область вероятного местонахождения судна, как показано на рис.3.
Область вероятного местоположения объекта
Рис.3. Влияние угловых погрешностей ориентации антенны
На расстояниях до радиомаяков, исчисляемых сотнями километров, погрешности измерения азимута всего в доли градуса проецируются в погрешности измерения местоположения, исчисляемые сотнями метров. Для современных условий судовождения такие погрешности неприемлемы.
По второму методу определения координат при измерении расстояний направленность действия приёмной антенны не влияет на точность позиционирования. В этом случае решающее значение приобретает точность синхронизации шкал времени передатчиков и приёмника, а также величина погрешности, возникающей при измерении времени прохождения радиоволной расстояния от передатчиков к приёмнику. Следовательно, применение в радионавигации дальномерного метода связано полностью с чрезвычайно высокой точностью определения временных параметров. Поэтому его практическая реализация началась в 1960-х годах после появления атомных часов. Практическим воплощением дальномерного метода стала морская навигационная система LORAN (Long Range Aid to Navigation – навигационное оборудование дальнего радиуса действия).
До этого успешное применение дальномерного метода было реализовано в радиолокационных станциях (РЛС). По сути РЛС является навигационной системой, в которой и излучатель и приёмник сосредоточены в одном пункте, например на судне. В морском флоте РЛС появились в 1950-х годах и стали играть важнейшую роль в совремённом мореплавании, так как могли определять не только место судна относительно береговых ориентиров, но и обнаруживать различные надводные объекты в условиях отсутствия видимости. Как известно, принцип действия РЛС основан на излучении радиоволн и их приёме после отражения от обнаруженного объекта. Морские навигационные РЛС измеряют два параметра в полярной системе координат; расстояние до объекта и направление на объект (курсовой угол или пеленг). Это как раз третий вариант определения местоположения из указанных выше. Поскольку РЛС как радионавигационная система является одноточечным объектом, в которой передатчик и приёмник используют общую антенну, то в этом случае исключается основная проблема дальномерного метода: синхронизация шкал времени излучателя и приёмника, разнесённых в пространстве. Постоянство скорости и прямолинейность распространения радиоволн позволяют вычислить расстояние от РЛС до объекта по измеренному времени t прохождения сигнала от РЛС до объекта и обратно, т.е. от момента излучения «зондирующего» радиоимпульса до приёма отраженного импульса (эхо-сигнала).
t=2D∕c, где:
D-расстояние до объекта;
c- скорость распространения радиоволн.
Следовательно, расстояние до объекта будет равно: D=c.t/2
Антенны судовых РЛС имеют острую диаграмму направленности, формирование которой в сантиметровом диапазоне волн, когда размеры антенны во много раз превышают длину волны, значительно упрощается. Направление определяется по методу максимума сигнала: антенна плавно поворачивается, и отсчет угла цели производится в тот момент, когда амплитуда сигнала на входе приёмника достигает максимума.
К сожалению, использование РЛС в навигационных целях для определения местоположения судна по береговым объектам или иным ориентирам ограничивается её дальностью действия.
При нормальных атмосферных условиях максимальная дальность равна радиолокационному горизонту или немного меньше. Радиолокационный горизонт дальше оптического (визуального) примерно на 6% из-за явления дифракции радиолокационного сигнала.
Проблема увеличения дальности действия радионавигационных устройств, равно как и проблема повышения точности определения координат с увеличением радиуса действия всегда стояла на первом плане, начиная с самого начала применения радиосредств в навигационных целях.
При этом первый вариант (и самый очевидный) повышения дальности действия создаваемых наземных навигационных радиомаяков за счёт применения диапазона длинных волн, естественно, приводил к увеличению погрешности определения местоположения судна вдали от береговой черты.
Поэтому вместо отдельных радиомаяков в 40-х годах прошлого столетия стали создаваться радионавигационные системы (РНС). Наземные РНС по сути представляли совокупность разнесённых радиостанций, которые работали совместно и согласованно друг с другом, создавая на земном пространстве сетку взаимопересекающихся линий положения. Линия положения - это совокупность множества точек с одним и тем же значением навигационного параметра. Как известно, например, для дальномерного метода линией положения будет окружность, для угломерного - линия пеленга на опорную точку, в системах с использованием разностно-дальномерного метода – гипербола. Изображение этих линий на навигационной карте (или запись координат их точек в таблице) даёт возможность получить радионавигационные параметры для определения местоположения судна при наличии на нём приемоиндикаторного устройства. Наиболее широкое распространение получили разностно-дальномерные системы или гиперболические, в которых при больших дальностях действия достигалась достаточно высокая точность местоположения. Например, созданные в 1960…1970 годах сверхдлинноволновые ( длина волны 30000м.,f=10кГц) радионавигационные системы дальней навигации «Омега» (американская) и РСДН-20 (советская) являлись практически системами глобального действия. Сеть станций этих систем обеспечивали дальность действия порядка 10000морских миль с погрешностью определения 1…5 миль. Длинноволновая система Loran – C, в которой был применён импульсно-фазовый способ определения дальности, получившая наибольшее применение в морской навигации, обеспечивала дальность действия порядка 1500 миль с погрешностью определения местоположения судна 0,1…0,5 мили. Это был наилучший результат точности определения для наземных радионавигационных систем, в которой был применён дальномерный метод определения координат. Следовательно, дальнейшее повышение точности радионавигационных систем связывалось исключительно с применением дальномерного метода и его усовершенствованием, которое получило своё развитие в системах спутниковой радионавигации.
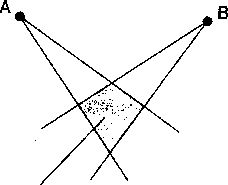
Возвращаясь к анализу применения радиосредств в навигации, следует отметить, что во многих случаях для исключения неоднозначности в определении координат необходим третий передатчик (см. рис.1.4.).
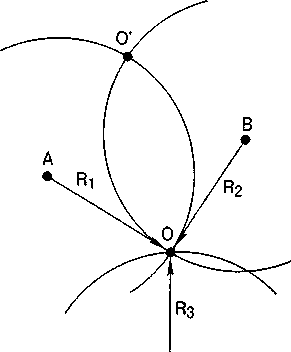
Рис.4. Определение параметров объекта по трем дальностям.
Истинные координаты приёмника (точка О) являются координатами точки пересечения воображаемых окружностей с радиусами R1, R2 и R3, равными дальностям до передатчиков A, B и C.