

5.2.2. Использование сарп при расхождении судов
Полная оценка ситуации возможна только с помощью анализа как первичной (необработанные эхосигналы целей), так и вторичной (векторы и цифровые данные) информации.
Анализ первичной информации для выбора целей для захвата производится глазомерной оценкой следов послесвечения целей так же, как и при ручной радиолокационной прокладке. В первую очередь, для автосопровождения выбираются опасные и потенциально опасные цели.
По вторичной информации оценивается степень опасности ситуации. При радиолокационном наблюдении с применением САРП судоводитель использует следующие данные для оценки степени опасности ситуации сближения:
- расположение вектора ОД относительно собственного судна;
- значения Dкр и tкр;
- курсовой угол (в режиме истинного движения) и дистанция до цели;
- характер изменения пеленга на цель.
Дополнительную полезную информацию для оценки ситуации и выбора маневра может дать прогнозирование развития ситуации путем изменения длины векторов цели. При оценке степени опасности ситуации необходимо также учитывать положения правила 7 МППСС-72.
Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и решительно в строгом соответствии с МППСС-72, сообразуясь с конкретными обстоятельствами ситуации сближения и условиями плавания и согласно рекомендациям хорошей морской практики. Следует помнить, что даже решительный маневр сможет быть обнаружен другим судном при использовании САПР только через 3…4 минуты после его начала.
После выбора маневра расхождения проводится его проигрывание (имитация) в заданное судоводителем время начала маневра (время упреждения). При имитации маневра во всех САРП ситуация рассчитывается только для целей, находящихся на автосопровождении, и предполагается, что все они сохраняют неизменными свой курс и скорость.
При выполнении маневра необходимо внимательно следить за векторами встречных судов, включая индикацию их прошлых положений, с целью как можно более раннего обнаружения их возможного маневра. Необходимо также тщательно контролировать эффективность маневра и в случае необходимости своевременно принимать дополнительные меры обеспечения безопасности. Непрерывный и тщательный контроль взаимного перемещения судов необходимо осуществлять до момента возвращения на прежний курс.
Вывод: для безопасности судна и экипажа не следует полагаться ни на какое навигационное оборудование. Штурман несет ответственность за проверку всего имеющегося оборудования для подтверждения положения судна. Электронное оборудование не заменяет собой базовые принципы навигации и здравый смысл.
Обнаружение радиолокационного спасательного ответчика (рсо – sart) и радиолокационного буя racon.
Радиолокационный Спасательный Ответчик РСО – SART (Search And Rescue Radar Transponder) может быть запущен любой РЛС 3-см-диапазона в пределах удаления от него около 8 миль. Каждый импульс, излучаемый РЛС и принятый РСО, может вызывать передачу ответного сигнала со стороны РСО. Приемник РСО сканирует диапазон возможных частот (9,2…9,5 ГГц) работы РЛС Х-диапазона (3,2 см). При срабатывании, РСО сначала быстро (0.4 мксек) пробегает диапазон, после чего начинает относительно медленный (7.5 мксек) обратный переход к начальной частоте. Этот процесс повторяется двенадцать раз. В какой-то точке каждого цикла частота РСО будет точно совпадать с частотой РЛС, вызвавшей срабатывание РСО, и попадет в пределы полосы пропускания приемника РЛС. В этот момент передатчик РСО автоматически начнет излучать сигнал. Если РСО находится в пределах диапазона, совпадение частот в каждой из 12-ти «медленных» разверток дает отклик на дисплее РЛС, так что можно увидеть 12 точек, равномерно отстоящих друг от друга примерно на 0.64 нм (См. рис.2.17- Экран А)
Когда дистанция от РЛС до РСО сократится приблизительно до 1 нм, на дисплее РЛС можно, также, увидеть 12 откликов, которые из-за уменьшения времени ответа принимают вид арок (см. рис.2.17 – Экран В). По мере приближения РЛС к работающему РСО, отметки РСО будут увеличиваться в радиальном направлении, захватывая всё большую часть экрана.
Экран А: Когда РСО далеко Экран В: Когда РСО близко
Линии из 12 точек изображаются в виде концентрических дуг.
Эхосигнал
от РСО
Позиц
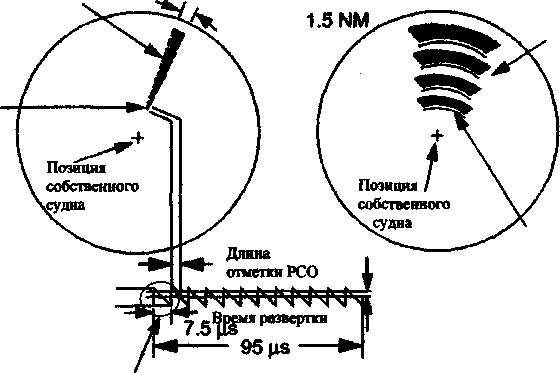
Рис.2.17 Отметки на экране ИКО от РСО.
При поиске РСО предпочтительно использовать шкалы дальности 6, 8 или 12 миль. Такой выбор обусловлен тем, чтобы увидеть, возможно, большее количество точек ответа, чтобы отличить сигнал РСО от других целей, а также помех.
Радиолокационный буй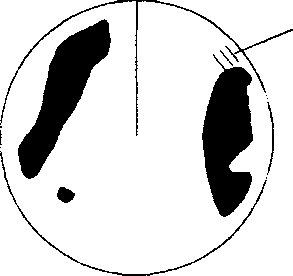 RACON
- это радиолокационный буй, который
излучает принимаемый РЛС сигнал в
спектре частот РЛС (Х- или S-
диапазона). Существует несколько форматов
сигналов; в общем случае,
сигнал радиолокационного буя, работающего
на той же частоте, которую имеет
запускающая его РЛС появляется на экране
РЛС в виде прямоугольного эха, исходящего
из точки непосредственно за позицией
буя, или в виде кодированной азбукой
Морзе последовательности (см. рис. 2.18).
RACON
может устанавливаться также на суше и
выполнять функции маяка.
RACON
- это радиолокационный буй, который
излучает принимаемый РЛС сигнал в
спектре частот РЛС (Х- или S-
диапазона). Существует несколько форматов
сигналов; в общем случае,
сигнал радиолокационного буя, работающего
на той же частоте, которую имеет
запускающая его РЛС появляется на экране
РЛС в виде прямоугольного эха, исходящего
из точки непосредственно за позицией
буя, или в виде кодированной азбукой
Морзе последовательности (см. рис. 2.18).
RACON
может устанавливаться также на суше и
выполнять функции маяка.
Рис. 2.18. Отметка на экране радиолокационного буя.