

Приложение 7 Токарный патронно-центровой станок с чпу
Токарный станок с ЧПУ мод. 16К20ФЗС32 (см. рис.) используют для токарной обработки деталей типа тел вращения в патроне и в центрах. Станок оснащен регулируемыми двигателями главного движения и подач постоянного тока или синхронными двигателями с частотным регулированием. Программа перемещений инструмента, управление главным приводом и вспомогательные команды вводятся в память системы управления с клавиатуры пульта управления, магнитной ленты или перфоленты и могут корректироваться на экране с помощью клавиатуры.
Наибольший диаметр заготовки над суппортом, мм – 220;
Устройство ЧПУ – Н22-1М;
Габаритные размеры: 3700х1700х2145 мм.
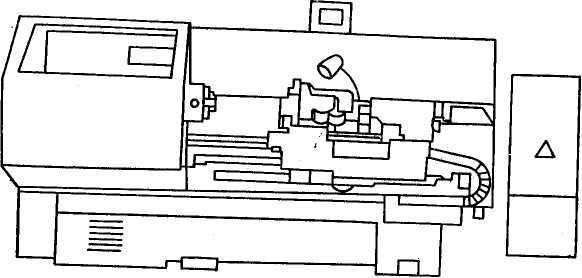
Рисунок – Станок мод. 16К20Ф3С32
Приложение 8 Вспомогательное оборудование
Промышленные роботы компонуются со вспомогательным оборудованием, в качестве которого используются тактовые столы, магазины-накопители и шаговые транспортеры.
Тактовые столы (рис. 7.1, табл. 7.1)предназначены для транспортирования деталей в зону захвата робота. Заготовки устанавливают непосредственно на пластины стола или на спутники.

Рисунок 7.1 – Тактовый стол
Таблица 7.1 Характеристики тактовых столов
Модель Габаритные размеры Размеры пластин
Стола стола, мм
L B H AxF lxb E C
С Т
150 2250
650 700—850 150х225 150х150 100 120
Т
150 2250
650 700—850 150х225 150х150 100 120
СТ 150.01 300—365
СТ 220 3260 700 700—850 220х252 220х220 110 190
СТ 220.01 300—365
СТ 350 3350 950 700—850 350х382 350х350 175 320
На рисунке 7.2 изображены схемы магазинов-накопителей для деталей типа тел вращения. Детали 2 устанавливаются на на щеках 1 с ложементами.

а б
Рисунок 7.2- Магазины-накопители для валов (а) и дисков (б)
Приложение 9
ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС «EV8031/AVR»
Для управления роботом ПР-5 применено управляющее устройство - микро процессорный комплекс на контроллере MKS-51. Питание пневматических золотников осуществляется от отдельного источника, подключаемого к сети переменного тока напряжением 220 В.
Стенд представляет собой микропроцессорный контроллер, оснащенный памятью программ и памятью данных. Он позволяет отлаживать программы, написанные на языках Си и Ассемблер. Загрузка программы производится с персонального компьютера по последовательному порту RS-232С.
Структурная схема стенда представлена на рисунке 4.1.
Расположение основных органов управления и микросхем на плате приведены на рисунках 4.2 и 4.3.

Рисунок 4.1 - Структурная схема стенда
ОЭВМ - однокристальная ЭВМ;
BIOS- базовая система ввода-вывода;
ПП - память программ;
ПД - память данных;
СОМ1 - последовательный порт для PC;
COM2 - последовательный порт для ПУ;
ППП - параллельный приемопередатчик;
ИПУ - интерфейс периферийных устройств (ПУ);
СУПП - схема управления последовательными портами;
ПП - последовательная память EEPROM

Рисунок 4.2 - Схема расположения элементов стенда
Х1 - системный интерфейс с полным адресным пространством;
Х4 - интерфейс расширения для подключения внешних устройств с использованием параллельного приемопередатчика;
Х2 - интерфейс последовательного порта СОМ1 для связи стенда с PC;
Х13 - интерфейс последовательного порта COM2 для связи стенда с другими устройствами, имеющими стандартный порт RS232C;
Х6 - интерфейс программирования AVR;
J4 - перемычка подключения сигнала синхронизации последовательной памяти;
J2, J3 - перемычка подключения линии передачи данных последовательной памяти;
J1 - перемычка разрешения автоматического запуска загруженной программы;
J5 - перемычка подключения сигнала выборки последовательной памяти

Рисунок 4.3 - Схема расположения элементов стенда