

Механизм поворота кисти
Механизм поворота кисти (рис. 3.6) состоит из корпуса 1, крышек 2 и 3, неподвижного сектора 4, лопасти 5. Лопасть проворачивается в подшипниках 6 и 7. На вал лопасти насажен фланец 8, к которому крепится привод захвата кисти. На фланце 8 установлен упор 9, а на крышке 3 - упоры 10, ограничивающие поворот лопасти. По каналу 11 воздух подводится к приводу захвата кисти. В моментный цилиндр воздух подводится через дроссели 12, служащие для регулирования скорости поворота вала. Выхлоп сжатого воздуха осуществляется через канал, поперечное сечение которого изменяется при помощи иглы 13, регулирующей скорость движения лопасти.
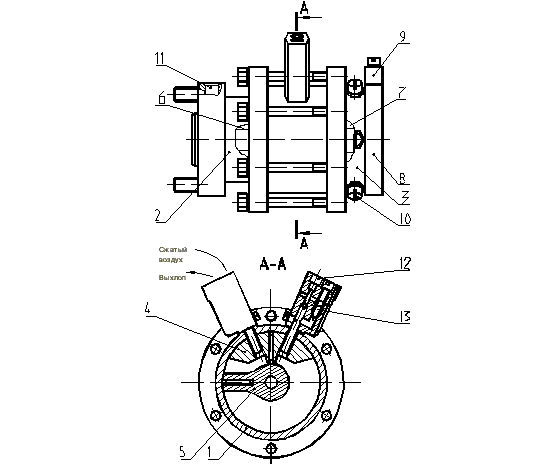
Рисунок 3.6– Механизм поворота кисти
Привод cхвата
Привод схвата представляет собой реечный механизм с косозубым зацеплением, имеющим привод от пневмоцилиндра одностороннего действия, и состоит из плиты, реек, штока, корпуса, поршня, пружины, планок.
При подаче сжатого воздуха в пневмоцилиндр поршень двигает шток, который находится в зацеплении с рейками, и раздвигает их, обеспечивая тем самым параллельное движение захватных элементов (губок и т.п.) cхвата. При отсутствии давления сжатого воздуха в пневмоцилиндре пружина возвращает поршень, а значит, и рейки, в исходное положение. Захватные элементы крепятся к рейкам с помощью Г-образных болтов, которые можно устанавливать в любом месте по всей длине рейки. Настройка на любой размер схватываемой детали осуществляется изменением места крепления захватных элементов на рейках, на которых для надежного закрепления захватных элементов выполнена насечка.
Cхват, т.е. захватное устройство (клещи, цанга и т.п.), разрабатывается в зависимости от конфигурации и размеров обрабатываемой детали.
Электрооборудование
Электрооборудование робота "Бриг-10Б-МК" включает следующие основные функциональные узлы и детали: устройство управления; кабели; реле давления; конечные выключатели; электромагниты пневмораспределителей.
Электрооборудование обеспечивает включение и выключение шести движений манипулятора в ручном и автоматическом режимах, семи единиц внешнего оборудования в автоматическом режиме, остановку считывания программы при пониженном давлении воздуха в пневмосистеме.
Для обеспечения питания бесконтактных конечных выключателей КДЦ-6М от источника постоянного тока 24В в электросхеме манипулятора имеется стабилизатор напряжения 12В.
Пневмооборудование
Пневмооборудование включает узел подготовки воздуха и блок воздухораспределителей (БВР). Узел подготовки воздуха состоит из фильтра - влагоотделителя БД обратного пневмоклапана, исключающего утечку воздуха из пневмосистемы робота, клапана редукционного КР, маслораспылителя МР и манометра МН. В этот узел включены также реле давления РД, которое подает сигнал на остановку считывания программы при падении давления воздуха в пневмосети робота ниже минимального значения, воздухораспределитель Р1, отключающий воздух в случае прекращения подачи электроэнергии.
Блок воздухораспределителей состоит из панели, на которой укреплены семь распределителей Р2-Р8, глушитель Г и дроссели ДР1, ДР2, служащие для регулировки скорости перемещения ползуна ПЛЗН и скорости опускания колонны механизма подъема МП.: Воздухораспределители соединены с исполнительными пневмоцилиндрами робота полиэтиленовыми трубками со следующими условными проходами: руки и механизма поворота dу = 8 мм, механизма подъема - dу = 6 мм, остальные механизмы – dу = 4 мм.
Для регулирования скоростей перемещения руки, поворотов кисти и руки предусмотрены дроссели ДР1-ДР6, перемещения колонны механизма подъема - ДР4. Дроссель ДРЗ служит для регулирования величины демпфирования руки.
Для подпитки воздухом исполнительных цилиндров служит ресивер РС.
ПРИЛОЖЕНИЕ 4