

Министерство образования и науки украины
Одесский национальный политехнический
университет
микропроцессорные системы управления
методические указания
к лабораторным работам
для студентов специальности 7.092203, 7092205
одесса
наука и техника
2011
Методические указания к лабораторным работам по курсу «Микропроцессорные системы управления» для студентов специальностей 7.092203, 7092205 / Составители В.В.Бушер, Е.В.Найденко – Одесса: Наука и Техника, 2011, 43 с.
Цель лабораторных работ по курсу «Микропроцессоры в электротехнике» - изучение основ программирования на языке Ассемблер микропроцессоров PIC16 и приобретение навыков разработки и отладки программ с помощью типовых средств компиляции и отладки.
Для достижения цели лабораторных работ студенты должны изучить соответствующие разделы и решить следующие задачи:
1. Изучить программное обеспечение для компиляции и симулирования программ для процессоров серии PIC16
Изучить подгруппу арифметических команд, составить и отладить программу расчета арифметического выражения.
3. Изучить подгруппу логических команд, составить и отладить программу расчета логической функции.
Изучить методы создания циклов и обработки массивов данных, составить и отладить программу обработки одномерного массива.
Изучить методы использ ования команд сдвига для реализации сложных арифметических процедур.
Изучить методы создания программ, составить и отладить программу табличной обработки массива потока данных.
Изучить методы управления периферийными устройствами, составить и отладить программу управления технологическим объектом через параллельный порт.
СведенИя о процессоре pic16. Система команд Архитектура процессоров семейства pic16
Высокая производительность семейства PIC16 обусловлена большим числом архитектурных особенностей, характерных для RISC микроконтроллеров. Процессоры PIC используют Гарвардскую архитектуру, основанную на концепции раздельных шин и областей памяти для данных и команд. Это усложняет внутреннюю структуру, но при равных тактовых частотах увеличивает производительность по сравнению с процессорами, используемыми в вычислительных системах, в которой команды и данные передаются по одной и той же шине. Разделение шин команд и данных позволяет устанавливать различную разрядность команд и данных, оптимизируя таким образом структуру процессора. Шина данных и память данных (ОЗУ) PIC16 являются 8-разрядными, а программная шина данных и программная память (ППЗУ или ПЗУ) являются 14-разрядными.
Такая концепция позволяет использовать простую, но мощную систему однословных команд, разработанную так, что битовые, байтовые и регистровые операции выполняются с высокой скоростью благодаря перекрытию по времени выборок команд и циклов их выполнения (конвейерная обработка команд). Каждая команда выполняется в течение 16-ти периодов тактовой частоты. Эти периоды разделены на 4 равных группы. Такую группу называют тактом процессора. Таким образом, один такт равен длительности 4-х периодов тактовой частоты. В течение первого такта происходит чтение команды и ее дешифрация, во втором такте осуществляется чтение и передача данных, в третьем такте выполняется обработка данных, в четвёртом – запись результатов. Так как в каждом такте используются различные устройства процессора и данные перемещаются по различным шинам, то возможно совмещение операций различных команд во времени. Четырехуровневый конвейер обеспечивает одновременную выборку и последовательное исполнение 4-х команд. В итоге все команды, кроме изменяющих состояние счетчика команд, выполняются за один такт. При тактовой частоте 20 МГц это соответствует выполнению команды за 200нс или производительности процессора в 5млн операций в секунду.
Регистры разделяются на две функциональные группы: специальные регистры и регистры общего назначения (USER FILES).
Специальные регистры включают в себя образ счётчика команд в двух регистрах (РСL и PCLATH), регистр состояния (STATUS), регистры, обеспечивающие косвенную адресацию (INDF, FSR), а также регистры портов ввода-вывода, аналого-цифрового преобразователя, таймеров, контроллера прерываний и предварительного делителя тактовой частоты и т.д. и регистры, определяющие конфигурацию этих устройств.
Регистры общего назначения используются для хранения переменных по усмотрению пользователя. В микроконтроллерах семейства PIC16 реализуется непосредственная, прямая и косвенная адресация к данным, абсолютная, относительная и индексная адресация к командам.
Микроконтроллеры PIC16 имеют ортогональную (симметричную) систему команд, позволяющую выполнять любую операцию с любым регистром, используя любой метод адресации. Это облегчает программирование для них и значительно уменьшает время, необходимое на обучение работе с ним.
В микроконтроллерах PIC16 имеется 8-разрядное арифметико-логическое устройство (АЛУ) и рабочий регистр W (Word). АЛУ выполняет сложение, вычитание, сдвиг, битовые и логические операции. В командах, имеющих два операнда, одним из операндов является рабочий регистр W. Второй операнд может быть константой или содержимым любого регистра ОЗУ. В командах с одним операндом, операнд может быть содержимым регистра или содержимым любого регистра ОЗУ. В регистре состояния STATUS в зависимости от результата выполнения операции могут изменяться значения битов (признаков) переполнения С, полупереноса (переноса между тетрадами) DC и нуля Z. Правила установки этих признаков описаны для каждой команды и соответствуют условиям выполнения этих команд в АЛУ.
Структурная схема микроконтроллеров семейства PIC16 приведена на рис.1.
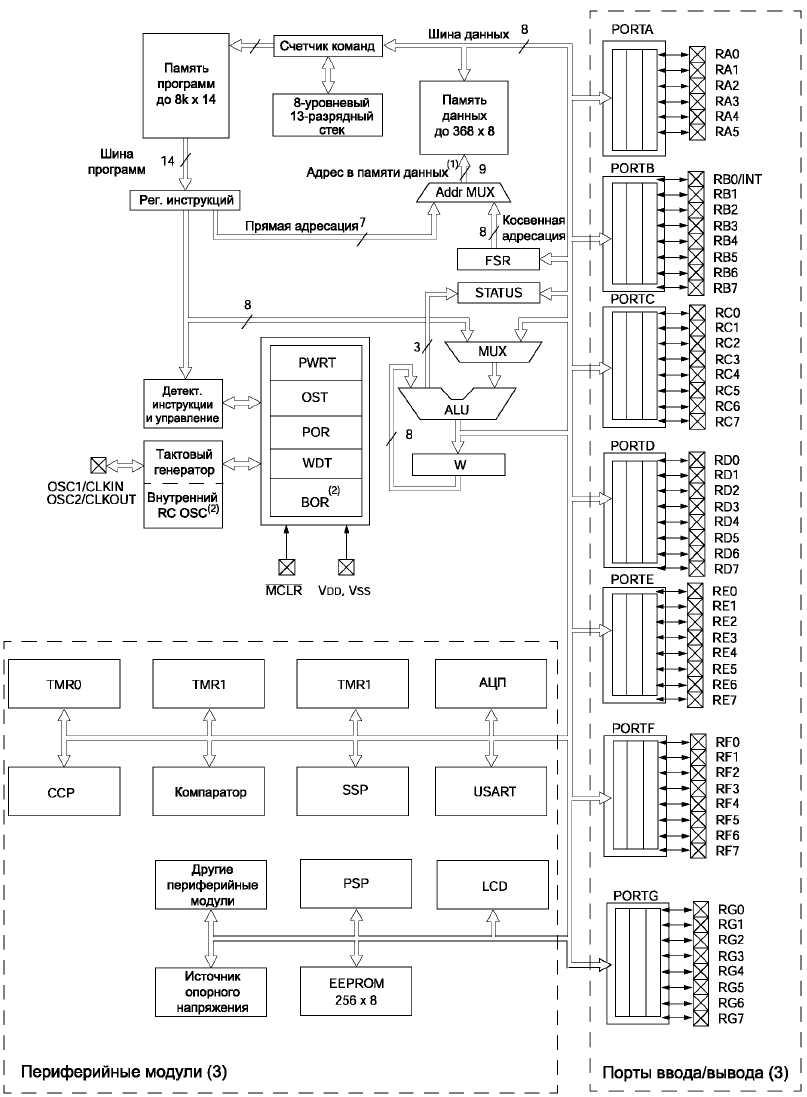
Рис.1 – Функциональная схема микроконтроллеров семейства PIC16