

Примеры выполнения курсовой работы
Пример 1. Несвободная система с двумя степенями свободы. Дано: Полый цилиндр 2 массой m2 (рис. 6.4) скользит по основанию 1 массой m1, способному вращаться вокруг неподвижного цилиндрического шарнира О. Основание удерживается спиральной пружиной с крутильной жесткостью C. В начальном положении механизм находится в состоянии статического равновесия и пружина деформирована. Введем неподвижную систему координат OXYZ так, чтобы ось OX была горизонтальна, и связанную с основанием систему координат OX1Y1Z1, ее ось OX1 параллельна оси цилиндра и направляющим основания, по которым скользит цилиндр. Центр масс основания O1 в системе координат OX1Y1Z1 имеет координаты x1O и y1O. Начальное положение Oн центра масс цилиндра O2 определяется координатами x2O и y2O точки Oн в системе координат OX1Y1Z1.
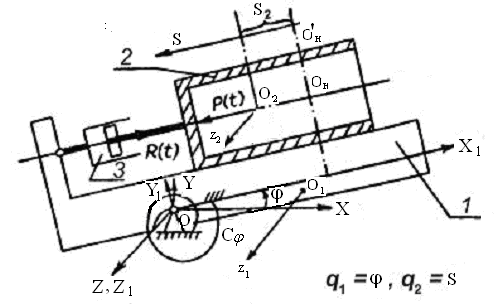
Рис. 6.4
В
начальный момент времени к внутренней
поверхности дна цилиндра прикладывается
нагрузка
![]() ,
определяемая по формуле (6.1). При этом
цилиндр начинает двигаться по основанию,
вызывая вращение последнего вокруг оси
шарнира
OZ.
Движение цилиндра тормозится реакцией
тормозного устройства 3,
приложенной к внешней поверхности дна
цилиндра
,
определяемая по формуле (6.1). При этом
цилиндр начинает двигаться по основанию,
вызывая вращение последнего вокруг оси
шарнира
OZ.
Движение цилиндра тормозится реакцией
тормозного устройства 3,
приложенной к внешней поверхности дна
цилиндра
![]() ,
определяемой по формуле (6.2).
,
определяемой по формуле (6.2).
Коэффициент трения скольжения при движении цилиндра по основанию f = 0,12. Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2 равны J1 и J2 соответственно. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ.
Указание. В качестве обобщенных координат выбрать угол поворота основания, отсчитанный от горизонтали (в начальный момент = 0), и координату S центра масс цилиндра на направляющей основания, отсчитанную от его начального положения. Исходные данные:
![]() кг,
кг,
![]() кг,
кг,
![]() кг∙м2,
кг∙м2,
![]() кг∙м2,
кг∙м2,
![]() м,
м,
![]() м,
м,
![]() м,
м,
![]() м,
м,
![]() Н∙м/рад
,
Н∙м/рад
,
![]() .
.![]()
Решение. Система имеет две степени свободы k = s , в качестве обобщенных координат выбираем:
1) угол поворота основания вместе с цилиндром , отсчитанный от горизонтали (в начальный момент = 0), q1=j;
2) координату S движения центра масс цилиндра 2 на направляющей основания 1, отсчитанную от его начального положения, q2=S.
Таким
образом, обобщенные координаты:
q1=j,
q2=S,
обобщенные скорости:
![]() .
.
Запишем уравнения Лагранжа второго рода
![]() .
.
Кинетическая энергия рассматриваемой механической системы относительно неподвижной системы отсчета: Т=Т1+Т2. Представим ее как функцию времени t, обобщенных координат q1=j, q2=S и обобщенных скоростей , а именно:
T = T (q1=j, q2=S, , t).
Кинетическая энергия основания, совершающего вращательное движение относительно оси OZ,

Кинетическая энергия цилиндра, совершающего плоско-параллельное движение относительно неподвижной системы отсчета,
![]()
Формулы
преобразования координат и поворотная
матрица
![]() относительно оси OZ
в соответствии с формулами (3.18) и (3.19)
имеют
следующий вид:
относительно оси OZ
в соответствии с формулами (3.18) и (3.19)
имеют
следующий вид:
– для центра масс основания

– для центра масс цилиндра

Матрица скоростей:
![]()
![]()


![]()
После приведения подобных членов относительно обобщенных скоростей, получаем T= T1+T2,

Уравнения Лагранжа второго рода для данной системы имеют следующий вид:
– для
q1
![]()
– для
q2
![]()
Вычислим производные от кинетической энергии системы:
– для
q1
=φ
![]() ,
,
![]()
![]()

окончательно
 где
где
![]()
Для
q2
=S
![]() ,
,
![]()
![]()
![]()
![]() .
.
В
левой части уравнений Лагранжа, как
правило, оставляют слагаемые со вторыми
производными от обобщенных координат.
Все остальные переносятся в правую
часть. Таким образом, обозначив слагаемое
в последнем выражении как -![]() окончательно получаем уравнение Лагранжа
второго рода
окончательно получаем уравнение Лагранжа
второго рода
![]() .
.
Обобщенные
силы для механических систем с числом
степеней свободы
i
= s = 2
![]() ,
,
![]() ,
отвечающие выбранным обобщенным
координатам, целесообразно вычислять
последовательно, учитывая, что обобщенные
координаты, а значит, и их вариации
не
зависят
друг от друга.
Системе всегда можно сообщить такое
виртуальное перемещение, при котором
изменяется только одна обобщенная
координата, а другие при этом не
варьируются. В этом случае из (2.15)
получаем:
,
отвечающие выбранным обобщенным
координатам, целесообразно вычислять
последовательно, учитывая, что обобщенные
координаты, а значит, и их вариации
не
зависят
друг от друга.
Системе всегда можно сообщить такое
виртуальное перемещение, при котором
изменяется только одна обобщенная
координата, а другие при этом не
варьируются. В этом случае из (2.15)
получаем:
![]() . (6.6)
. (6.6)
Для
определения обобщенной силы
дадим системе такое приращение, что
1)![]() ,
и найдем виртуальную работу от всех
заданных активных сил:
,
и найдем виртуальную работу от всех
заданных активных сил:
![]() ,
,
![]() ,
,
![]() ,
,
![]()

Сравнивая множитель (в квадратных скобках) в выражении виртуальной работы перед вариацией с формулой (6.6), получаем выражение для первой обобщенной силы
![]() Определяя
,
будем полагать, что S
0,
а
для угла
поворота цилиндра 2,
будем считать
=0 (
=const),
т.е.
Определяя
,
будем полагать, что S
0,
а
для угла
поворота цилиндра 2,
будем считать
=0 (
=const),
т.е.
2)
S
0, =0 ( = const);
![]()
![]() .
.
Сравнивая множитель (в квадратных скобках) в выражении полученной виртуальной работы перед вариацией S с формулой (6.6), получаем выражение для второй обобщенной силы
![]() .
.
Составим дифференциальные уравнения в виде матриц
![]() .
.
Для
![]()

Для
![]()
![]()
окончательно
1)
![]()
2)
![]() ,
,
где
![]() ,
если
,
если
![]() ,
,
![]() ,
если
,
если
![]() ,
,
т.е.
![]() ;
;
![]() ;
;
![]() .
.
Пример
2. Несвободная система с тремя степенями
свободы. Дано.
Рекомендуемые
значения физических величин (рис. 6.5):
m1
= 3 700 кг – масса тела;
![]() =
10 300 кг·м2
– момент инерции относительно оси О1z1;
l1
= 3,8 м – расстояние от точки С
до точки К;
координаты центра
масс тела О1
в
системе координат
СX1Y1Z1:
х10
= 3,8 м , y10
= 0,8 м, y20
= 1,0 м – расстояние от линии действия
силы
=
10 300 кг·м2
– момент инерции относительно оси О1z1;
l1
= 3,8 м – расстояние от точки С
до точки К;
координаты центра
масс тела О1
в
системе координат
СX1Y1Z1:
х10
= 3,8 м , y10
= 0,8 м, y20
= 1,0 м – расстояние от линии действия
силы
![]() до оси СХ1
; С1
= 2,0·106
Н/м – жесткость пружины КМ;
С2
= 2,0·107
Н/м – жесткость пружины CD
; С3
= 2,0·107
Н/м – жесткость пружины СЕ;
С
= 2,0·106
Нм/рад – жесткость спиральной пружины;
0
= 6°, 30° – начальный угол возвышения
основания.
до оси СХ1
; С1
= 2,0·106
Н/м – жесткость пружины КМ;
С2
= 2,0·107
Н/м – жесткость пружины CD
; С3
= 2,0·107
Н/м – жесткость пружины СЕ;
С
= 2,0·106
Нм/рад – жесткость спиральной пружины;
0
= 6°, 30° – начальный угол возвышения
основания.
Рис. 6.5
За обобщённые координаты приняты следующие параметры:
q1 = xC , q2 = yC , q3 = . q1 = xC – перемещение шарнира С по горизонтальной оси, отсчитанное от положения статического равновесия пружины CD; q2 = yC – перемещение шарнира С вдоль вертикальной оси, отсчитанное от положения статического равновесия пружины CЕ; q3 = – угол поворота тела, отсчитанный от горизонтали СХ1.
Кинетическая энергия рассматриваемого тела, совершающего плоскопараллельное движение относительно неподвижной системы отсчета и связанной с ней системой координат XOYZ:
![]() .
.
Формулы
преобразования координат от СX1Y1Z1
к XOYZ
и поворотная матрица
![]() относительно оси СZ
в соответствии с формулами (3.18) и (3.19)
для центра масс тела 1
имеют следующий вид:
относительно оси СZ
в соответствии с формулами (3.18) и (3.19)
для центра масс тела 1
имеют следующий вид:

Матрица скоростей:
![]() .
.
![]()


Квадрат абсолютной скорости центра масс тела в обобщённых координатах:
![]()
Кинетическую
энергию тела представим как функцию
времени t,
обобщенных координат q1
= xC
, q2
= yC
,
q3
=
и
обобщенных скоростей
![]() :
:
T
= T
(q1=xC,
q2
= yC
,
q3
= ,
![]() .
.

Уравнения Лагранжа второго рода для данной системы имеют вид:
– для
![]()
![]() ;
;
– для
![]()
![]() ;
;
– для
![]()
![]() .
.
Частные производные по обобщённым координатам:
![]() ;
;
![]()
Частные производные по обобщённым скоростям:


Полные производные по времени:


Запишем
окончательно левые части уравнений
Лагранжа второго рода, оставив только
слагаемые со вторыми производными от
обобщенных координат. Все остальные
слагаемые перенесем в правую часть
уравнения, обозначив их как
![]() :
:
–
![]()
где
![]()
–
![]()
где
![]()
–
![]()
![]() ,
где
,
где
![]() .
.
Для
нахождения обобщенных сил
![]() рассмотрим приложенные к системе силы.
Определим первоначальные сжатия пружин
КМ
и СЕ
в положении статического равновесия.
рассмотрим приложенные к системе силы.
Определим первоначальные сжатия пружин
КМ
и СЕ
в положении статического равновесия.
Уравнение равенства моментов при t=0 относительно оси CZ1
![]()
![]() ,
,
где
![]()
момент силы тяжести в момент времени
t=0;
момент силы тяжести в момент времени
t=0;
![]() – момент
силы упругости пружины КМ.
Отсюда
– момент
силы упругости пружины КМ.
Отсюда
![]() первоначальное
сжатие пружины КМ.
первоначальное
сжатие пружины КМ.
Уравнение равенства сил по оси OY
![]() ,
,
где
![]() – сила упругости пружины КМ;
– сила упругости пружины КМ;
![]() – сила упругости пружины СЕ,
отсюда
– сила упругости пружины СЕ,
отсюда
![]() первоначальное
сжатие пружины СЕ
первоначальное
сжатие пружины СЕ
Силы, действующие на тело в текущий момент времени t:
![]() – сила
тяжести;
– сила
тяжести;
![]() – переменная
нагрузка, прикладываемая к телу; где
Р1 = 2,37·106 Н
– максимальная нагрузка;
а1
= 6,68·1010
Н/с2
– коэффициент; t1
= 0,005 с – временной параметр;
– переменная
нагрузка, прикладываемая к телу; где
Р1 = 2,37·106 Н
– максимальная нагрузка;
а1
= 6,68·1010
Н/с2
– коэффициент; t1
= 0,005 с – временной параметр;
![]()
![]() – сила
упругости пружины КМ,
– сила
упругости пружины КМ,
где
![]() – координата
точки К
в момент времени t
;
– координата
точки К
в момент времени t
;
![]() – координата
точки К
в начальный момент времени;
– координата
точки К
в начальный момент времени;
![]() – константа;
– константа;
![]() – сила
упругости пружины CD
;
– сила
упругости пружины CD
;
![]() –
–
сила упругости пружины СЕ.
Моменты, действующие на тело, относительно оси CZ1 :
![]() – момент
силы тяжести;
– момент
силы тяжести;
![]() – момент
переменной нагрузки;
– момент
переменной нагрузки;
![]() – момент
силы упругости пружины КМ;
– момент
силы упругости пружины КМ;
![]() – момент
спиральной пружины.
– момент
спиральной пружины.
Виртуальная работа согласно (2.15)
![]() . (6.7)
. (6.7)
Так как обобщённые координаты – независимые друг от друга параметры, то и их вариации тоже независимы. Поэтому, используя принцип замораживания, находим виртуальные работы, соответствующие виртуальным перемещениям поочередно:
1)
![]() ,
,
![]() ;
;
2)
![]() , (6.8)
, (6.8)
![]() ;
;
3)
![]() ,
,
![]() .
.
Сравнивая множители в (6.7) перед вариациями обобщённых координат и в формуле (6.8), находим обобщённые силы, соответствующие обобщённым координатам:
![]() ;
;
![]() ;
;
![]()
Окончательный вид уравнений Лагранжа второго рода или дифференциальные уравнения движения рассматриваемой системы в обобщенных координатах:
–
![]() ,
,
где
–
![]()
где
–

где ,
или
в
матричной
форме
![]() ,
,
где
![]() – инерционная матрица,
,
если
,
,
если
,
– инерционная матрица,
,
если
,
,
если
,
![]() ,
,
![]() =
=
![]() –
матрица-столбец
обобщенных сил;
–
матрица-столбец
обобщенных сил;
![]() – матрица-стол-бец
слагаемых, перенесенных из левых частей
уравнений Лагранжа, не содержащих
обобщенных ускорений.
– матрица-стол-бец
слагаемых, перенесенных из левых частей
уравнений Лагранжа, не содержащих
обобщенных ускорений.
Решение системы уравнений Лагранжа второго рода, описывающих движение указанной механической системы (рис. 6.5), на интервале времени от t = 0 до t = 0,01 с выполнено в системе Mathcad 11. Распечатка результатов расчёта в системе Mathcad 11 для начального угла 0 = 30° приведена на рис. 6.6, а для начального угла 0 = 6° на рис. 6.7.
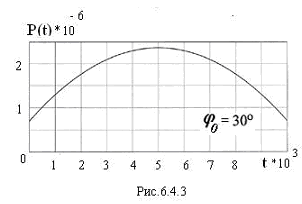
Рис. 6.6

Рис. 6.6. Окончание


Пример 3. Несвободная система с тремя степенями свободы. Дано. Полый цилиндр 2 массой m2 (рис. 6.8) скользит по основанию 1 массой m1, опирающемуся на цилиндрический шарнир О и поддерживаемому вертикальной пружиной КМ. Жесткость пружины C1, длина недеформированной пружины l2, расстояние от шарнира О до точки К опоры пружины l1. Коэффициент трения цилиндра об основание f = 0,12. K шарниру C прикреплена горизонтальная пружина CD жесткостью C2. В начальном положении пружина CD не деформирована, а пружина КМ поддерживает систему в положении статического равновесия.
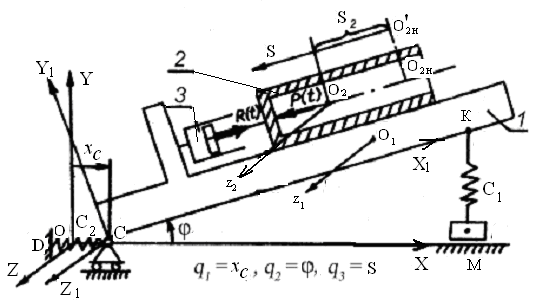
Рис.6.8
Введем неподвижную систему координат OXYZ, ось OX которой горизонтальна, и связанную с основанием систему координат OX1Y1Z1, ее ось OX1 параллельна направляющей основания, по которой скользит цилиндр. Положение центра масс O1 основания задается координатами x1O и y1O точки O1 в системе координат OX1Y1Z1, причем y1O = 0,6 м. Начальное положение цилиндра на основании определяется начальными значениями координат x2O и y2O точки O2 в системе координат OX1Y1Z1. Точка Oн совпадает с начальными положением центра масс цилиндра O2.
В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t), определяемая по зависимости (6.1). При этом цилиндр 2 начинает скользить по основанию 1, вызывая вращение последнего вокруг оси шарнира OZ. Движение цилиндра тормозится реакцией R(t) тормозного устройства 3, приложенной к внешней поверхности дна цилиндра. Величина реакции определяется по формуле (6.2). Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2 равны J1 и J2 соответственно.
Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ.
Указание.
В качестве обобщенных координат
выбрать:
1) перемещение точки C
по горизонтальной оси
,
отсчитанное от положения статического
равновесия пружины CD;
2) угол поворота
основания
![]() ,
отсчитанный от горизонтали,
и 3) перемещение S
центра масс цилиндра 2
по направляющей основания 1
,
отсчитанный от горизонтали,
и 3) перемещение S
центра масс цилиндра 2
по направляющей основания 1
![]() ,
отсчитанное
от его начального положения Oн.
Начальное значение = 0.
Длину недеформированной пружины l2
определить из условия статического
равновесия системы в начальный момент
времени. Рекомендуемые значения величин
приведены в табл. 6.3.
,
отсчитанное
от его начального положения Oн.
Начальное значение = 0.
Длину недеформированной пружины l2
определить из условия статического
равновесия системы в начальный момент
времени. Рекомендуемые значения величин
приведены в табл. 6.3.
Исходные
данные: m1
– масса основания; m2
– масса цилиндра. Число степеней свободы:
i
=s
= 3. За обобщенные координаты приняты
следующие параметры:
;
;
.
Обобщенные скорости:
![]() ;
;
![]() ;
;
![]() .
В рассматриваемую механическую систему
входят: основание 1
и цилиндр 2,
совершающие плоскопараллельное движение
относительно неподвижной системы
координат OXYZ,
.
В рассматриваемую механическую систему
входят: основание 1
и цилиндр 2,
совершающие плоскопараллельное движение
относительно неподвижной системы
координат OXYZ,
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
i=1,2,
,
i=1,2,
где
![]()
Координаты центра массы основания в матричной форме:
![]() (1),
или
(1),
или
![]() ,
где
,
где
![]() ,
т.е.
,
т.е.

Скорости центра массы основания в матричной форме:
![]()
![]() ,
или
,
или
![]() ;
;
![]() ;
;

![]()
![]()
Кинетическая энергия основания в функции обобщенных координат и обобщенных скоростей:

Координаты центра массы цилиндра в матричной форме:
![]()
![]() .
.
Скорости центра массы цилиндра 2 в матричной форме:
![]() , или
, или
![]() ;
;
![]() .
.
их квадраты:



Кинетическая энергия цилиндра в функции обобщенных координат и обобщенных скоростей:

Кинетическая энергия системы
![]()
![]()

Уравнения Лагранжа второго рода для данной системы:
![]()
![]()
Для :
![]() ;
;


окончательно
левая часть уравнения по
![]()
![]() ;
;

Для :



окончательно
левая часть уравнения по
![]()
![]() ;
;

Для
![]() :
:
![]()
![]()
![]()
окончательно
![]()
![]()
Перепишем уравнения Лагранжа второго рода, оставив в левой части только слагаемые со вторыми производными от обобщенных координат. Все остальные слагаемые перенесем в правую часть уравнения, обозначив их как

![]()
Уравнения Лагранжа второго рода в матричной форме:
![]() ,
,
где – инерционная матрица, , если , , если ,
или
![]() ,
,
инерционные коэффициенты:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Виртуальная работа сил, действующих на рассматриваемую систему:
![]() ;
;
![]() .
.
Так как обобщённые координаты независимые друг от друга параметры, то и их вариации тоже независимы. Поэтому, используя принцип замораживания, находим виртуальные работы, соответствующие виртуальным перемещениям поочередно:
1) ![]() ,
,
![]() ;
;
2)![]() ,
,

3) ![]() ,
,
![]() .
.
Сравнивая множители в выражениях виртуальных работ перед вариациями соответствующих обобщённых координат и в формуле (6.7), находим обобщённые силы, соответствующие обобщённым координатам:
![]() ;
;

![]() .
.