

Мотс. Задание № 3. Вариант № 10.
2
Дан функционал I(x)=t2x2dtэкстр
1
2
Ограничения txdt =7/3 ,x(1)=1,x(2)=2
1
Найти х(t)
Решение:
1.Составляем функцию Лагранжа:
f = t2x2 -подинтегральное выражение функционала,
k= tx- подинтегральная функция ограничения
L= f+k = t2x2 +tx
2 Подставляем L в формулу Эйлера:
Lx – d/dt(Lx)=0 , где Lх =t, Lx=2xt2
Следовательно получим уравнение :
t– d/dt(2xt2)=0
3. Рещаем диффернциальное уравнение
d(2xt2)= tdt
2xt2 =t2/2+C1
x= /4+C1/( 2t2)
x = t/4 - C1/( 2t) +C2
Для нахождения С1,С2 и воспользуемся ограничениями :
2
txdt=7/3 ,x(1)=1,x(2)=2
Тогда : 1= /4- C1/2+С2
2= /2- C1/4+С2
Откуда : С1= 4-, С2=3-3/4
Выразим х через : х =t/4 + /(2t) –2/t +(3-3/4)
Подставим х в ограничение вида :
2
txdt=7/3
1
Тогда :
2
t2/4+ /2 –2 + t(3-3/4) dt=7/3 , вычисляем интеграл:
1
2 2 2
t3/12 + (3-3/4)t2/2 + (/2 –2)t =2,5-/24=7/3
1 1 1
След-но =4
Подставив =4 в выражение для С1 иС2 получим С1=С2=0
Тогда х = t/4 = t
Ответ : x = t
Мотс. Задание № 4. Вариант № 10.
Дан объект второго порядка, имеющий два нулевых корня. Найти оптимальное по быстродействию управление, при котором объект из любой точки фазовой плоскости переходил бы в начало координат за минимальное время.
u = d2y/dt2 , u 1, y10(0)= -1.7 , y20(0)= -1.2 , y1к(T)= 0 , y2к(T)= 0 .
Решение
1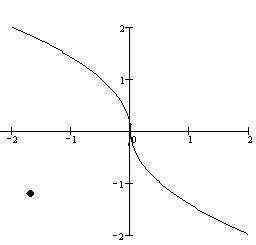 .Определим
первоначальное управление.
.Определим
первоначальное управление.
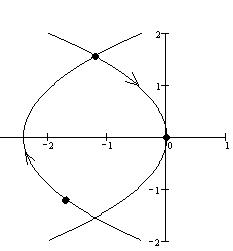
Построим начальную точку на фазовой плоскости
начальная точка находиться ниже кривой переключения, следовательно, первоначальное управление u=1, после переключения u=-1.
2 .Находим начальную и конечную траекторию движения.
Для рассматриваемого случая начальная траектория y1 = 0,5 y22 + S1 ,
конечная траектория y1 = -0,5 y22.
3.Подставляем координаты начальной точки y1(0)= y10 , y2(0)= y20 , в уравнения для фазовых координат при управлении и = 1 , находим постоянные К1 , К2 , S1 :
 y2
= t + К1
,
y2
= t + К1
,
y1 = t2/2 + К1 t + К2 = 0,5 y22 + S1 ,
y20 = 0 + К1 ,
y10 = 0 + 0 + К2 ,
y10 = 0,5 y202 + S1 , S1= y10 + 0,5 y202
y10 =-1.7 y20 = -1.2 К 1=-1.2 К2 = -1.7 S1 =-2.425
4. Нахождение времени переключения. Для этого используем равенство y1 = -0,5 y22 (уравнение линии переключения) :
tп2/2 + К1tп + К2 = -0,5 (tп + К1 )2
tп = 2.756
5. Находим координаты точки переключения:
y1п = tп2/2 + К1 tп + К2 ,
y2п = tп + К1
y1п = -1.21 y2п = 1.556
6. Находим коэффициенты А1 и А2 , решив систему уравнений:
y1п = - tп2/2 + А1tп + А2 ,
y2п = - tп + А1
А1 = 4.311
А2 = -9.294
7. Находим время прихода в конечную точку из уравнения:
y2к = 0 = -tк + А1 , tк = А1
 tк
= 4.311
tк
= 4.311
Оптимальная траектория движения изображена