

2.4. Интерференционные помехи от соседних и ближайших каналов
В системах подвижной связи используются понятия «частотный план» (ЧП) и «частотно-территориальное планирование» (ЧТП). Частотный план присваивается стандарту и определяет распределение частот приема и передачи между каналами. Частотные планы для ряда стандартов были рассмотрены ранее (см. лекцию №2, рис.2-4). Частотные каналы, расположенные в таком плане рядом, называются ближайшими.
ЧТП разрабатывают для конкретной территории, на которой развернута система. В нем указывается размерность кластера; распределение частотных групп между сотами; расположение сот на территории; число каналов в каждой частотной группе, присвоенной соте; номинальные значения частот каналов в такой группе. На БС к одной антенне может быть подключено до 16 канальных приемопередатчиков. Во избежание взаимных помех не допускается работа передатчиков ближайших каналов через общую антенну БС.
Каналы,
работающие на общую антенну, называются
соседними. Как правило, для каждого
стандарта рекомендуется наименьший
частотный разнос между соседними
каналами
 ,
где М
- целое число;
,
где М
- целое число;
 - ширина полосы частот одного канала.
Например, для NMT-450
- ширина полосы частот одного канала.
Например, для NMT-450
 7
=175
кГц, для GSM
3
= 600
кГц; для DAMPS
21
= 630 кГц, при
необходимости может быть уменьшена до
150 кГц (до 90 кГц при тщательном планировании
ЧТП). При таких значениях
7
=175
кГц, для GSM
3
= 600
кГц; для DAMPS
21
= 630 кГц, при
необходимости может быть уменьшена до
150 кГц (до 90 кГц при тщательном планировании
ЧТП). При таких значениях
 в общих устройствах сложения (разделения)
сигналов передатчиков (приемников)
обеспечивается необходимая развязка
по соседнему каналу.
в общих устройствах сложения (разделения)
сигналов передатчиков (приемников)
обеспечивается необходимая развязка
по соседнему каналу.
На
МС
интерференционную помеху от ближайшего
канала создают передатчики соседних
сот. Избирательность по этим каналам
обеспечивает полосовой фильтр приемника
МС.
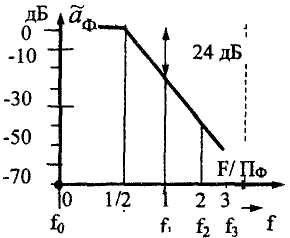
На рис.22. показано типовая (односторонняя)
АЧХ этого фильтра. Здесь обозначено f0
– центральная частота канал; f1,
f2,
f3
– несущие соседних каналов; F
– расстройка; ПФ
– ширина полосы пропускания фильтра
по уровню минус 3дБ;
 - ослабление фильтра относительно уровня
на краю полосы. Типовой фильтр за
пределами полосы пропускания вносит
затухание
- ослабление фильтра относительно уровня
на краю полосы. Типовой фильтр за
пределами полосы пропускания вносит
затухание
 =24дБ
на октаву (т.е. при увеличении расстройки
в 2 раза).
=24дБ
на октаву (т.е. при увеличении расстройки
в 2 раза).
Рис.22. Типовая АЧХ полосового фильтра приемника МС.
Интерференционная помеха по соседнему каналу может возникать на БС в ситуации, когда МС1 находится на границе соты, а МС2 около БС (внутри соты) (см рис.23.).
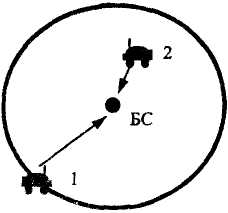
Рис.23. К объяснению помехи по соседнему каналу.
Положим,
что передатчики на обеих МС излучают
одинаковые мощности. Тогда, при приеме
сигнала от МС1 согласно (2.19) отношение
сигнал-помеха
 ,
где Ri
– расстояние от i-ой
МС при i=1
или 2. Если эти расстояния отличаются
в 10 раз, то
,
где Ri
– расстояние от i-ой
МС при i=1
или 2. Если эти расстояния отличаются
в 10 раз, то
 дБ, и если допустимое значение отношения
сигнал-помеха составляет 20 дБ, то фильтр
приемника БС
должен обеспечивать ослабление
помехи
дБ, и если допустимое значение отношения
сигнал-помеха составляет 20 дБ, то фильтр
приемника БС
должен обеспечивать ослабление
помехи
 дБ. Это соответствует параметру расстройки
фильтра
дБ. Это соответствует параметру расстройки
фильтра
 =
60/24=2,5
=
60/24=2,5
Минимальный
частотный разнос между соседними
каналами
 .
Эту проблему обычно разрешают двумя
путями: выбирают приемник с высокой
избирательностью и обеспечивают
регулировку мощности излучения МС.
.
Эту проблему обычно разрешают двумя
путями: выбирают приемник с высокой
избирательностью и обеспечивают
регулировку мощности излучения МС.
МС, находящаяся около БС, может создавать помехи приему сигнала удаленной МС из-за перегрузки усилителя приемника. (уровень сигнала превышает максимальный входной уровень). Точка насыщения такого усилителя соответствует максимальному входному уровню сигнала рС НАС 55 дБм. Если уровень сигнала превышает это значение, то возникают нелинейные продукты. Когда их частоты попадают в полосу пропускания соседнего канала, они создают помехи. При приеме в соседнем канале сигнала от удаленной МС значение отношения сигнал-помеха может оказаться ниже допустимого.
Примеры показывают, что при составлении ЧТП необходимо учитывать изменение положения МС. Оптимальный ЧТП должен адаптироваться к таким изменения. Однако, в существующих реальных системах, как правило, этого нет.