

5.3. Регулирование частоты вращения по отклонению
Торпеды последнего поколения Мк 48 Mod 5, Мк 50, Spearfish, Тр 62, МТТ, в отличие от предыдущих, стали оснащаться системами регулирования по отклонению частоты вращения вала двигателями движительного комплекса (ДДК) от задаваемого значения. Типов таких систем много, но принцип их действия у всех одинаков: датчик создает информационный сигнал Uи, пропорциональный частоте вращения вала, который одновременно с командным сигналом Uк – задаваемой частотой вращения – поступают в устройство, оценивающее отклонение частоты вращения вала от требуемого значения ΔU=Uk - Uи. После усиления, если это необходимо, отклонение как управляющий сигнал Uу подается в исполнительный орган, который под его воздействием изменяет расход рабочего тела двигателя, приводя обороты двигателя к заданному значению.
На ранних стадиях (учебного) использования торпеды командный сигнал формируется различными системами. Во время предстартовой подготовки боевая информационно-управляющая система (БИУС) носителя по информации от собственной гидроакустической станции непрерывно рассчитывает и вводит в систему управления торпедой (СУТ) параметры, определяющие поведение торпеды от старта до начала поиска цели, в том числе и командный сигнал. Последний вариант этих параметров после отрыва кабеля ввода данных сохраняется в памяти бортовой цифровой вычислительной машины (БЦВМ) торпеды. Для телеуправляемых торпед и при их движении БИУС носителя продолжает вводить в торпеду алгоритм ее поведения, но рассчитываемый уже и по информации о параметрах движения торпеды, а после включения ССН и о параметрах движения цели. С момента отрыва провода управления или при отсутствии такового, командный сигнал формирует БЦВМ торпеды по информации от систем самонаведения, управления энергетической установкой и ходом торпеды.
Многообразие систем регулирования по отклонению обусловлено, прежде всего, большим числом типов датчика частоты вращения, который в свою очередь диктует и аппаратурный состав преобразователя информационного сигнала в управляющий. Имеются датчики механические, гидравлические, электрические, электромагнитные и много других, создающие соответственно информационный сигнал в виде линейного перемещения, напора потока жидкости, напряжения электрического тока, частоты электрических импульсов… Датчики с электрическими методами измерения частоты вращения делят на тахогенераторы и тахометры [3.2]. Тахогенераторы постоянного тока, асинхронные и др. – контактные датчики имеют механическую связь с валом, выходное напряжение которых линейно зависит от частоты вращения вала. Тахометры – бесконтактные датчики индукционные, индуктивные, гальваномагнитные и др., создающие электрические импульсы, частота которых пропорциональна частоте вращения вала. ИЗ этого множества наиболее целесообразны торпеды ЭУ индукционные тахометры. В качестве примера приводятся паспортные данные серийного индукционно двухканального датчика ИС 445:
назначение – бесконтактное измерение частоты вращения подвижных объектов;
подвод питания не требуется;
диапазон измерения 3000÷40000 об/мин;
габариты: диаметр датчика 23 мм, диаметр фланца 40 мм, длина 48 мм;
масса не более 0,06 кг;
величина выходного напряжения при 5000 об/мин 3 в;
сопротивление изоляции н менее 20 М Ом;
активное сопротивление обмотки 650÷150 Ом;
амплитуда высокочастотных сигналов при номинальной нагрузке (R=3,9 кДм, С=1000 пф) и оборотах вала от 5000 до 40000 об/мин не менее 1,5 в;
вал объекта или специальное кольцо на нем из магнитного материала должны иметь выступы высотой не менее 5 мм и протяженностью 10 мм.
В качестве датчика может использоваться торпедный электрогенератор с приводом от двигателя торпеды. В этом случае для получения информационного сигнала никаких дополнительных приборов не требуется.
Оценка отклонения реальной частоты вращения от заданной в ранних системах выполнялась сумматором электрических величин. В современных системах ЭТУ функцию выполняют БЦВМ.
Исполнительные органы систем регулирования частоты вращения, как уже отмечалось, предназначены для изменения расхода рабочего тела двигателя с целью ликвидации отклонения частоты вращения вала ДДК от задаваемого значения. Такую функцию могут осуществлять насосы переменной производительности регуляторы расхода и регуляторы давления.
В ЭУ отечественной торпеды МТТ исполнительным органом является аксиально-плунжерный насос, производительность которого – расход рабочего тела двигателя – изменяется поворотом плоского кольцевого золотника, изменяющего фазы впуска-выпуска топлива; его функционирование описано в параграфе 3.3., рис 3.5. Управляющий сигнал в этой системе подается на резистор, изменяющий параметр электрического тока, подводимого от электрогенератора торпеды к электродвигателю привода золотника насоса.
В ЭУ торпеды Spearfish, Великобритания, в качестве исполнительного органа также использован аксиально-плунжерный насос, но с воздействием на расход топливной смеси изменением угла наклона приводного диска (см. параграф 3.3., рис. 3.4). Управляющий сигнал в этой системе подается на регулятор давления командной среды, которая через систему поршень - рычаги изменяет наклон диска.
Исполнительным органом в ЭУ торпеды Мк 50, США, служит регулятор расхода конденсата - жидкой фазы рабочего тела турбины (водяного пара). Перемещение клапана регулятора производится электромагнитным устройством при воздействии на него управляющего сигнала.
Шведские проектанты в ЭУ своей торпеды Тр 62 в качестве исполнительного органа системы регулирования оборотов использовали регулятор давления забортной воды, подаваемой насосом на вытеснение из резервуаров всех трех компонентов рабочего тела двигателя. Регулятор воды дублирует давление командной среды, формируемое в регуляторе командного давления управляющим сигналом системы регулирования оборотов.
Внедрение систем регулирования по отклонению частоты вращения вала движительно-двигательного комплекса от задаваемого значения в современные многорежимные глубоководные торпеды объясняется многими причинами, основные и них следующие:
- частота вращения вала ДДК чувствительна ко всем возмущениям, действующим на торпеду;
- пропорциональность частоты вращения гребного вала и скорости торпеды означает, что такая система регулирует как частоту вращения вала ДДК, так и скорость торпеды;
- современные средства преобразования неэлектрических параметров в электрические делают такие системы компактными и надежными, а при информационном параметре в виде частотного сигнала упрощается перевод информации в цифровую форму и повышается помехоустойчивость системы;
- многофункциональность системы, помимо «классической» функции – стабилизации оборотов – может выполнять и выполняет «плавное» изменение скорости торпеды, перевод ДДК с одного режима на другой, переход со стартового топлива на главное, плановую и аварийную остановку двигателя и др.
В известных публикациях сравнительно полно описана система регулирования частоты вращения по отклонению вала ДДК торпеды Мк 50 [ ]. Энергетические установки этой торпеды и английской торпеды Spearfish разрабатывались американской фирмой Sundstrand, принимавшей участие и в создании энергетических установок торпед Мк 48 и Мк 46. Эти обстоятельства и информация о системах регулирования в перечисленных торпедах позволяют предположить, что системы регулирования в них однотипны. На рис. 5.2. представлена структурная схема регулирования частоты вращения вала ДДК торпеды Мк 50, запатентованная в 1986 г. в Европейском патентном бюро. Структура системы «классическая», аппаратный состав в конце прошлого века является типовым, в последующие годы он естественно мог быть модернизирован.
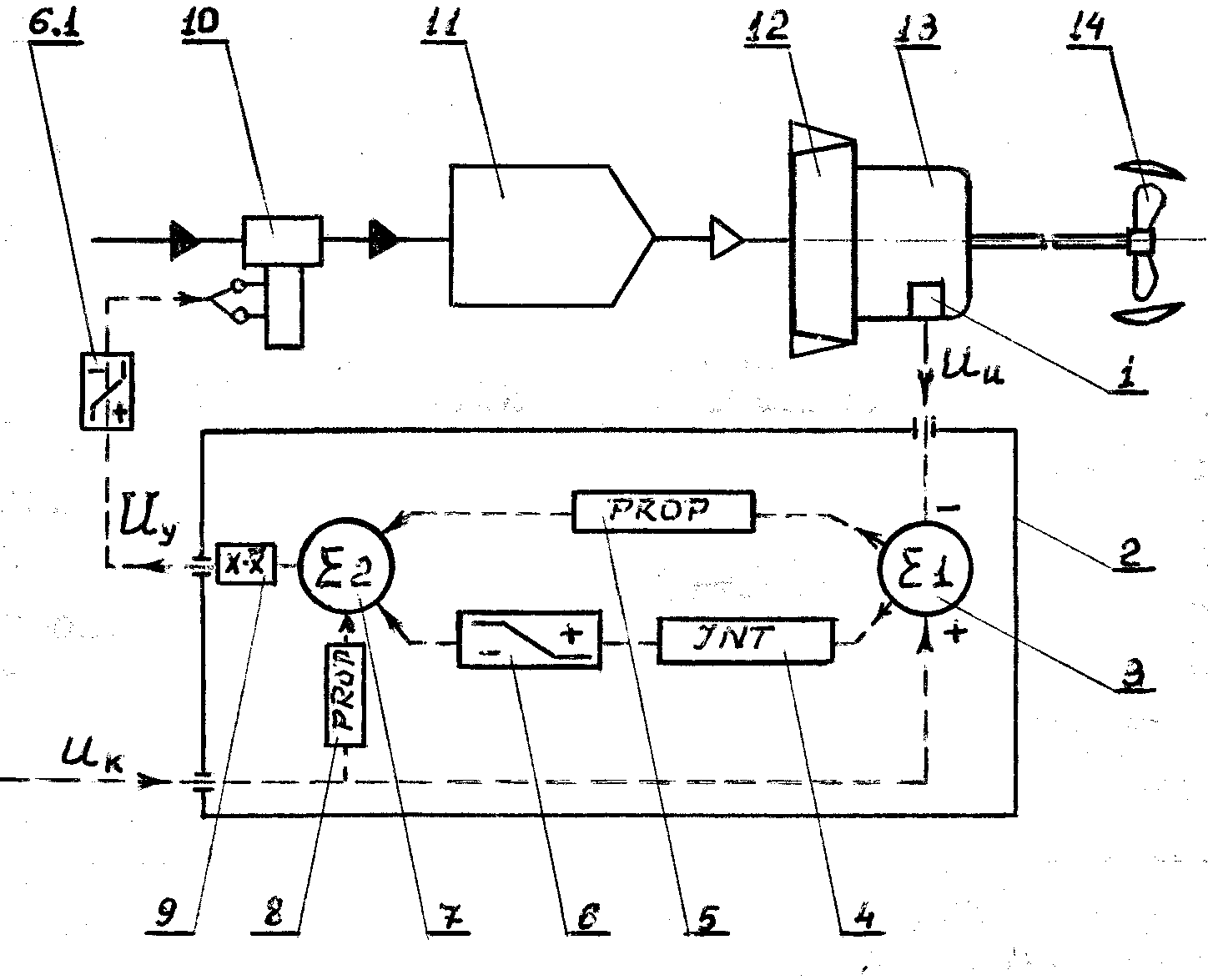
Рис. 5.2. Структурная схема системы регулирования частоты вращения вала двигателя по ее отклонению от задаваемого значения
1 – датчик частоты вращения, 2- блок формирования управляющего сигнала, 3,7 – сумматор, 4 – интегральный усилитель, 5, 8 – пропорциональный усилитель, 6, 6.1 – предельный ограничитель, 9 – умножитель x-x, 10 – исполнительный орган, 11 – камера сгорания, 12 – двигатель, 13 – редуктор частоты вращения, 14 – движитель
Датчик частоты вращения 1 создает электрический информационный сигнал Uи, пропорциональный частоте вращения движителя 14, а, следовательно, и скорости движения торпеды.
![]()
где
n - частота вращения движителя,
λ - поступь винта движителя,
V - скорость торпеды.
Датчик, как правило, размещают на одном из валов редуктора привода вспомогательных механизмов. Сигнал Uи поступает в сумматор 3 блока формирования управляющего сигнала 2. На сумматор 3 поступает также командный сигнал Uк, пропорциональный требуемой в данный момент частоте вращения движителя (скорости торпеды). Назначение сумматора 3 – определить величину отклонения реальной частоты вращения от заданной
![]() .
.
Величина сигнала ΔU, как правило, недостаточна для создания перестановочных усилий в исполнительном органе 10, поэтому блок 2 должен содержать элементы, увеличивающие величину рассогласования. Так в системе регулирования двигателя торпеды Мк 50 с этой целью используется пропорциональный усилитель 5. Для улучшения динамических характеристик системы – перерегулирования, устойчивости, быстродействия – сигнал ΔU параллельно подается и в интегральный усилитель 4. Усиление в элементах 5 и 4 значения отклонения ΔU поступают в сумматор 7. Если двигатель должен работать на нескольких фиксированных режимах, то величина отклонения должна быть привязана к величине командного сигнала. В таких случаях в сумматор 7 подается и командный сигнал, увеличенный в усилителе 8 до величины Uк. Предельные значения параметров за усилителем 4 контролирует ограничитель 6, а на входе в исполнительный орган 10 ограничитель 6.1. Элементы 4, 5, 6, 7 являются «классическим» пропорционально-интегральным регулятором. Сумматор 7 преобразует полученную информацию в управляющий сигнал, дополнительное усиление которого может производиться в умножителе 9, производящего умножение величины на ее модуль, т.е. возводящего в квадрат без изменения знака. В результате на выходе из блока 2 формируется управляющий сигнал Uу=ΔU+Uk.
Сигнал Uу поступает в исполнительный орган 10, и, перемещая его элементы, изменяет расход топлива (топливный смеси, энергокомпонентов) до положения, при котором величина отклонения ΔU не станет равной нулю, т.е. реальная и заданная частоты вращения станут равными.
В торпедах, оснащенных цифровой вычислительной машиной (ЦВМ) оказалось целесообразным, как уже отмечалось выше, формирование управляющего сигнала. Принцип работы системы сохранился, но ее элементный состав естественно стал иным. В качестве примера можно привести последовательность операций и основные элементы одного из возможных вариантов системы с использованием компьютера: датчик частоты вращения создает информационный частотный сигнал Uи, который после усиления поступает в аналого-цифровой преобразователь, где переводится в цифровую форму и подается в компьютер; компьютер по информации, получаемой по проводу телеуправления, или от ССН торпеды, или по программе, заложенной в его памяти, вырабатывает командный сигнал Uk, и, сравнивая его с информационным сигналом формирует управляющий сигнал Uу=Uк+Uи; сигнал Uу после преобразования в аналоговую форму поступает в резистор, который управляет параметрами электрического тока, подаваемого на приводной механизм исполнительного органа от бортового источник питания; последующие операции приведения реальной частоты вращения к заданной аналогичны описанным выше.
Помимо стабилизации частоты вращения (скорости торпеды) системы регулирования с описанной структурой могут выполнять следующие функции:
- дискретно изменять режим работы двигателя, а, следовательно, и скорость торпеды;
- изменять скорость торпеды по «плавному» закону;
- формировать сигнал на переход со стартового топлива на основное;
- осуществлять плановую и аварийные остановки двигателя и др.