

2.8 Понятие установившихся и переходных режимов работы элементов и систем автоматики
При
приложении воздействий, к какому либо
объекту (элементу или системе автоматики)
из-за инерционности объекта возникает
переходный процесс, который через
некоторое время заканчивается. После
окончания переходного процесса объект
работает в режиме, который называется
установившимся. Например, если на
электродвигатель подать напряжение
питания, то после его разгона (переходного
процесса) установится определенная
частота
 вращения
его вала (установившийся режим) (рисунок
2.7).
вращения
его вала (установившийся режим) (рисунок
2.7).
Установившиеся режимы бывают 2-х типов: статические и динамические.
Если после окончания переходного процесса выходная величина объекта остается постоянной при постоянном воздействии, то такой установившийся режим является статическим.
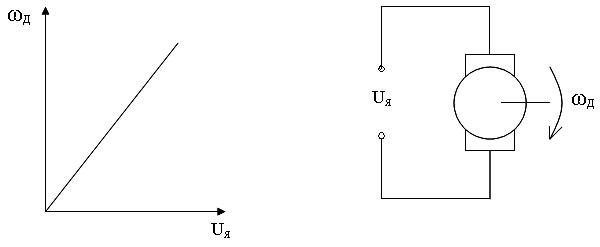
Статической характеристикой называется зависимость между постоянным входным воздействием и постоянной выходной величиной объекта в установившемся режиме (после окончания переходного процесса). Например, для электродвигателя постоянного тока статическая характеристика – зависимость между напряжением Uя, подаваемым на якорь, и выходной величиной – частотой ωд вращения ротора, изображена на рисунок 2.8.
Статический режим отражает статическая характеристика объекта.
Динамические установившиеся режимы могут возникать при постоянном воздействии, на объект и воздействии, изменение которого носит установившийся характер.
Примерами установившихся динамических режимов при постоянных воздействиях являются автоколебания, возникающие в нелинейных системах. Примером установившихся динамических режимов при установившемся воздействии является реакция линейного звена или линейной системы на гармоническое входное воздействие




Установившийся
режим
ωД
Переходный
процесс
0
t
Р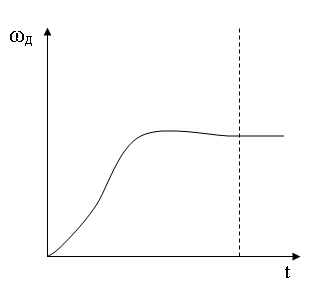 исунок
2.7 – Переходный
процесс и установившийся режим работы
электродвигателя после подачи на него
напряжения питания
исунок
2.7 – Переходный
процесс и установившийся режим работы
электродвигателя после подачи на него
напряжения питания

ωД
Uя
ωД

Uя
0
Рисунок 2.8 – Статическая характеристика электродвигателя
и поясняющая схема
2.9 Типовые воздействия. Временные и частотные характеристики линейных систем и звеньев
При эксплуатации на системы и их отдельные элементы (звенья) действуют различные внешние воздействия. Наиболее часто изучают реакцию систем и звеньев на типовые воздействия, являющиеся математическими моделями наиболее часто встречающихся реальных воздействий.
В качестве типовых используют следующие воздействия.
1. Ступенчатое воздействие (единичная ступенчатая функция):

где  – единичное ступенчатое воздействие;
– единичное ступенчатое воздействие;
 –
величина ступенчатого воздействия.
–
величина ступенчатого воздействия.
2. Импульсное воздействие (дельта-функция):
