

Информационно-измерительные системы и асутп [21-24]
Назначение, цели и функции АСУТП. Классификация АСУТП. Состав АСУТП (ИВС)
Этапность (стадийность) разработки АСУТП. Каналы связи. Информационные характеристики канала Структурные схемы устройства связи с объектом для приема аналоговых сигналов. Структура УСО по выдаче управляющих сигналов
Аналого-цифровые и цифро-аналоговые преобразователи.
Помехи в системах связи ИВС. Схема проникновения помех. Способы борьбы с помехами. Экспериментальные исследования помехозащищенности
Системы базисных функций. Двоично-ортогональные системы базисных функций. Функции Уолша. Свойства функций Уолша. Система Уолша-Пэли. Масштабирование данных
Классификация информационных сигналов. Сигналы. Модели процессов, аналитически представляющих сигнал. Аналитическое описание сигналов
Методы решения математических зависимостей. Численные методы вычисления математических функций Погрешности в цифровой системе управления. Погрешности. Причины возникновения погрешностей
Идентификация систем управления. Идентификация в процессе управления. Классификация методов идентификации. Структура идентификации. Динамические методы идентификации
1. Назначение, цели и функции асутп. Классификация асутп. Состав асутп (ивс)
Назначение любой АСУ определяются тем объектом, для которого создается данная система. Для АСУТП управляемым объектом является технологический объект управления (ТОУ), представляющий собой совокупность технологического оборудования и реализованного на нем по соответствующим инструкциям или регламентам технологического процесса производства целевого продукта.
Управляя ТОУ, АСУТП воздействует непосредственно на те или иные элементы оборудования: дроссельные и отсечные клапаны, задвижки и т.п.
При разработке АСУТП важно правильно выделить объект управления из общей производственно-технологической структуры предприятия.
Назначение АСУТП обычно можно определить как целенаправленное ведение технологического процесса и обеспечение смежных и вышестоящих систем управления необходимой информацией. В ряде случаев, когда функционирование новых сверхмощных объектов без современной АСУ оказывается практически невозможным, назначением такой системы является достижение реализуемости и устойчивости технологического процесса при высокоинтенсивных и экономичных режимах использования оборудования.
После определения назначения АСУТП необходимо четко конкретизировать цели функционирования системы. Примерами таких целей для промышленных технологических объектов могут служить: обеспечение безопасности его функционирования; стабилизация параметров входных потоков; получение заданных параметров выходных продуктов; оптимизация режима работы объекта; согласование режимов работы оборудования.
Степень достижения поставленных целей принято характеризовать с помощью критерия управления, т.е. показателя, достаточно полно характеризующего качество ведения технологического процесса и принимающего числовые значения в зависимости от вырабатываемых системой управляющих воздействий.
Не меньшую роль, чем критерий, играют ограничения, которые должны соблюдаться при выборе управляющих воздействий. Ограничения бывают двух видов: физические, которые не могут быть нарушены даже при неправильном выборе управляющего воздействия, и условные, которые могут быть нарушены, но нарушение приводит к значительному ущербу, не учитываемому критерием.
Функция АСУТП - это совокупность действий системы, направленных на достижение частной цели управления.
Принято различать информационные и управляющие функции АСУТП.
К информационным относятся такие функции АСУТП, результатом выполнения которых являются представление оператору системы или какому-либо внешнему получателю информации о ходе управляемого процесса.
Характерными примерами информационных функций АСУТП являются:
контроль основных параметров, т.е. непрерывная проверка соответствия параметров процесса допустимым значениям и немедленное информирование персонала при возникновении несоответствий;
информирование оператора (по его запросу) о производственной ситуации на том или ином участке объекта управления в данный момент;
Управляющие функции АСУТП включают в себя действия по выработке и реализации управляющих воздействий на объект управления. Здесь под выработкой понимается определение (на основании полученной информации) рациональных воздействий, а под реализацией - действия, обеспечивающие осуществление принятых после выработки решений.
К основным управляющим функциям относятся:
стабилизация переменных технологического процесса на некоторых постоянных значениях, определяемых регламентом производства;
программное изменение режима процесса по заранее заданным законам;
защита оборудования от аварий;
Перечень всех функций, выполняемых конкретной АСУТП (т.е. ее функциональный состав), характеризует внешние, потребительские возможности данной системы.
Классификация АСУТП
Современные системы управления ТП можно классифицировать по категориям:
Область применения
АСУ производственного процесса изготовления продукции. Включает автоматизацию конвейеров и приборов, обеспечивающих изготовление составных элементов объекта.
АСУ зданий. Включает охранно-пожарную сигнализацию, учёт электрической и тепловой энергии, охрану периметра и другие подсистемы здания. АСУ ТП зданий можно разделить:
Автоматизация административных зданий
Автоматизация жилых зданий
Автоматизация промышленных сооружений. К этой группе относятся необслуживаемые объекты, в которых необходимо производить учёт внешнего состояния и учёт процессов, протекающих внутри объекта (например, АСУ Котельной)
По времени реакции. Все АСУТП могут быть разделены на:
критические по времени
режим мягкого реального времени
режим жесткого реального времени (любой отказ приводит к выходу из строя всей системы)
некритические по времени.
АСУТП классифицируются по типу применяемого оборудования
Цифровое
Аналоговое
Цифроаналоговое
По принципу управления
Централизованные
Децентрализованные
Распределённая
По протоколу связи объектов
Fieldbus (LonWorks, Modbus, P-NET, EIB, и т.д.)
Ethernet
Собственная разработка
По фактору обслуживания
Обслуживаемые
Необслуживаемые
Состав АСУТП (ИВС)
Под термином «управляемый технологический процесс» понимается такой процесс, для которого определены входные контролируемые воздействия (управляющие, управляемые), установлены детерминированные или вероятностные зависимости между входными воздействиями и выходными параметрами выпускаемого изделия, разработаны методы автоматического измерения входных воздействий и выходных параметров (всех или их части) и методы управления процессом. Таким образом, управляемый технологический процесс представляет собой процесс, в принципе подготовленный для внедрения АСУТП (рис). На рис. приняты обозначения: 1 - ЭВМ; 2 - устройство связи с оператором; 3 - оператор; 4 - устройство сопряжения с объектом; 5,9 - автономные устройства визуального контроля; 6,8 - датчики; 7 - исполнительные органы; 10 - технологический объект управления.

УВК


 1
2 3
1
2 3








 4
4





5 6 7 8 9









 10
10
2.Этапность (стадийность) разработки АСУТП. Каналы связи. Информационные характеристики канала Структурные схемы устройства связи с объектом для приема аналоговых сигналов. Структура УСО по выдаче управляющих сигналов
Основные этапы построения АСУТП
Стадия анализа предметной области.
Выявляется основное назначение и функции, которые будут решать АСУТП.
Выбор архитектуры системы с учетом промышленных протоколов коммутации и устройств связи с объектом.
Выбор измерительной и исполнительной аппаратуры (датчики и исполнительные элементы).
Выбор проектирования основных регуляторов, обеспечивающих функции стабилизации и слежения.
Проектирование ПО устройств вычисления и разработка алгоритмов для функционирования устройств вычисления.
Выбор оборудования для АСУ, а также выбор протокола связи с узлом мониторинга и управления.
Ориентировка на анализ подобных решений и выявления основных особенностей, связанных с передачей данных на узле. Это связано с тем, что на узле вычислений может возникнуть задержка по передаче данных, т.к. функцией узла вычисления является не только передача данных, но и взаимодействие с конечным оборудованием. В связи с этим протокол коммутации и узел мониторинга не должны ухудшать общие характеристики системы по функционированию в режиме РВ.
Разработка ПО верхнего уровня.
ПО верхнего уровня должно иметь возможность отображения всех измеряемых параметров, а также обеспечения регулирования тех параметров, которые связаны с исполнительными устройствами.
ПО верхнего уровня должно иметь возможность формирования уставов (требуемое желаемое значение параметра, формируемое оператором). Это некое модельное значение, рассчитанное не по функциям, а регулятором.
Построение комплексной системы АСУТП с учетом всех выявленных характеристик и особенностей.
После построения и реализации систем производиться ее испытание в течение заданного времени с целью выявления рассогласования с моделью и неточностью измерений.
Измерительный канал АСУТП.
АСУТП является информационной системой, содержащей в качестве измерительной подсистемы измерительные каналы (ИК).
Измерительные каналы – это распределенное средство измерения, рассматриваемое как единая неразрывная структура для получения, обработки и представления информации о значении физической величины на основании входного сигнала модели объекта, несущего измерительную информацию.
Фактически ИК – это совокупность датчика и ИК. При этом одни датчик может иметь несколько ИК и один ИК может иметь несколько датчиков.
Любой ИК должен соответствовать методам измерений, а методы измерений регламентируются ГОСТ Р8.563-96.
От качества ИК зависит качество регулирования в АС, качество полученных результатов.
Виды измерительных каналов.
Могут классифицироваться
По измеряемому параметру: По виду подключения:
измерение давления с одного датчика
измерение частоты с нескольких датчиков
измерение температуры с параллельно включенным измерением
измерение сдвига
Измерение потока
Для повышения надежности АСУТП на ОУ может быть установлено дополнительно от 1 до 3 ИК.
Достоверность ИК определяется путем различного контроля:
допускового
перекрестного
теплового
функционального
В конечном виде ИК объединяются в общий модуль ПТК (программно-технический комплекс).
К любому ИК имеется собственный алгоритм обработки входного значения.
Общая схема систем

На выходе ИК могут находиться «сырой код» либо обработанное значение.
«Сырой код» - это значение, представляющее физическую величину в условных единицах, т.е. это оцифрованное аналоговое значение без учета плавающей части и масштаба параметров.
Обработанное значение – это значение, полученное по результатам расчета и представленное в единицах напряжения.
Структурные схемы устройства связи с объектом для приема аналоговых сигналов
Операционные модули УСО можно разделить на шесть групп:
Преобразователь аналог-код и код-аналог.
Устройство обмена цифровой информации.
Дешифраторы адресов и коммутаторы линии связи.
Буферные запоминающие устройства с функциями счета и без.
Устройство локального управления и обмена информацией.
Устройство коммутации и преобразования аналоговых сигналов.
К устройствам первой группы относятся следующие типы преобразователей:
напряжение-код , ток-код
код-напряжение, код-ток
перемещение-код, код-перемещение
пневматический сигнал-код, код-пневматический сигнал
частота-код, код-частота
Устройство сопряжения с объектом (УСО), не является принадлежностью микроконтроллера (МК), но его конкретная техническая реализация определяет, какими видами сигналов МК может обмениваться с ОУ. Конструкция ОУ и цель управления им накладывают определенные требования на конструкцию УСО. Поэтому конструкции УСО не поддаются унификации и в каждом конкретном случае возможно то или иное техническое решение.
На рис. изображена структура УСО применительно к гипотетическому объекту управления, который характеризуется различными сигналами на выходе и входе.
УСО обеспечивает связь объекта управления с шиной данных МК с использованием интерфейсных схем интерфейс ввода (Ин.вв). Технологические параметры объекта (температура, давление, перемещение, влажность и пр.) в первичных преобразователях (ПП) - термопарах, термометрах сопротивления, индуктивных датчиках - преобразуются в электрические сигналы (постоянное напряжение или частоту). Пройдя через блок нормирующих преобразователей БНП, обеспечивающий стандартный уровень сигнала, контролируемые параметры поступают на мультиплексор (МС), который коммутирует один из входных сигналов на единственный выход. Коммутация обеспечивается подачей цифрового кода через интерфейс вывода (Ин.Выв.) посредством программы. Скоммутированный канал подается на схему выборки и хранения (УВХ) и далее на аналого-цифровой преобразователь (АЦП), на выходе которого формируется цифровой код, пропорциональный величине контролируемого параметра. Затем цифровой код может быть считан в МП через интерфейс ввода (Ин.Вв.) и шину данных системы. Считанный цифровой код подвергается дальнейшей цифровой обработке в МП по определенному алгоритму. Если необходима индикация результата измерений, то через Ин.Выв результирующая информация может быть подана на цифровой индикатор. Если по результатам измерения необходимо воздействовать на объект, то Ин.Выв может быть использован для передачи через схему управления (Сх.У) и исполнительное устройство (ИУ)управляющего воздействия на объект. Конструкция схемы управления существенно зависит от типа исполнительного устройства.
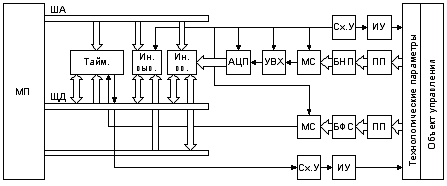
В случае, когда контролируемый параметр преобразуется в частоту, процедура его ввода в МП значительно упрощается и после формирования в блоке формирования сигнала (БФС) и коммутирования в МС сводится к подаче на вход таймера. Все остальные преобразования, связанные с расчетом величины контролируемого параметра, обеспечиваются за счет управляющей программы.
Следует заметить, что такие звенья УСО, как мультиплексор, схема выборки и хранения, АЦП и Сх.У, нуждаются в управляющих воздействиях всякий раз, когда требуется обращение к ним. Управление этими устройствами осуществляется программно-цифровым кодом, поступающим из ШД системы через интерфейс вывода.