

3.2. Режими роботи та матаматичні моделі оу
Існують два режими роботи об’єктів управління ОУ- статичні та динамічні.
У статичному (сталому) режимі ОУ знаходиться у стані рівноваги, коли приплив (надходження) речовини (або енергії) в ОУ дорівнює стоку речовини або енергії (її витратам), а регульована змінна (вихідний параметр) не залежить
від часу і є Xвих(t) = const.
З порушенням рівноваги між припливом і станом речовини або енергії
має місце динамічний режим роботи, так як регульована величина починає
змінюватись в часі Xвих(t) const.
Обом режимам відповідає статична та динамічна модель ОУ, та відповідно їхня статична і динамічна характеристики.
Математичний опис процесів, що відбуваються в системі може бути аналітичним (за допомогою рівнянь), графічним (за допомогою графіків та структурних схем), та табличним. Такі рівняння або структури називаються математичними моделями (ММ) і мають на увазі, що при описі фізичних
процесів за допомогою ММ завжди роблять деякі припущення.
При створенні ММ починають дослідження із простої ММ, яку при необхідності ускладнюють. ММ повинна по можливості повніше відображувати ОУ, а з іншого боку якомога простішою.
Під математичною (ММ) моделлю (статичною або динамічною) розуміють сукупність математичних залежностей, які описують поведінку ОУ (описують зв’язки між вхідними параметрами ОУ), в сталому статичному режимі (статична модель) або в стані його переходу із одного сталого режиму в інший під дією збурення (динамічний режим), і ті умови (збурення, обмеження), в яких він працює і які суттєві для визначення задачі управління.
3.3. Статична модель та статична характеристика оу
Для виведення рівнянь статичної моделі складають, як правило, рівняння матеріального та енергетичного балансу в сталому режимі, тобто, коли різниця притоку речовини (чи енергії) в об’єкт та їхні витрати дорівнюють нулю.
![]() ,
або
,
або
![]() ,
,
де Gj та Gi – відповідно витрати речовини на притоку і витоку із ОУ, або по енергії відповідно, яка надходить в ОУ і витрачається.
В загальному вигляді система рівнянь, що описує статичний стан ОУ
із зосередженими параметрами, має вигляд системи із n рівнянь:
i = 1,2,…,n Xi = fi( X1, X2,…, Xn; Y1, Y2,…, Ym; Z1, Z2,…,ZJ )
де X1, X2,…,Xn - вихідні регульовані змінні; Y, Z- вхідні керуючі та збурюючи параметри.
 Сукупність
цих рівнянь з обмеженням складає статичну
модель ОУ
і використовується: для вибору параметрів
обладнання, для конструювання обладнання
з попередньо заданими властивостями,
для оптимізації технологічного процесу.
Сталий режим ОУ
характеризує і статична характеристика,
яка визначає залежність вихідної
регульованої змінної Xвих
від вхідної дії на об’єкт. Вона може
бути по управляючій дії Ур
і по збуренню
Z.
Якщо, наприклад, на ОУ
діє одне збурення Z
та одна управляюча дія Ур,
то в загальному вигляді сталому режиму
відповідають два рівняння:
Сукупність
цих рівнянь з обмеженням складає статичну
модель ОУ
і використовується: для вибору параметрів
обладнання, для конструювання обладнання
з попередньо заданими властивостями,
для оптимізації технологічного процесу.
Сталий режим ОУ
характеризує і статична характеристика,
яка визначає залежність вихідної
регульованої змінної Xвих
від вхідної дії на об’єкт. Вона може
бути по управляючій дії Ур
і по збуренню
Z.
Якщо, наприклад, на ОУ
діє одне збурення Z
та одна управляюча дія Ур,
то в загальному вигляді сталому режиму
відповідають два рівняння:
Хвих
Z
ОУ
ОУ


 Ур
Ур
Статична характеристика ОУ може бути лінійною і нелінійною.
Для лінійної характеристики ОУ (рис. 3.2) рівняння має вигляд:
Xвих
=
KXвих![]() +
В
, де K
– коефіцієнт передачі об’єкта ( К
= tg
);
+
В
, де K
– коефіцієнт передачі об’єкта ( К
= tg
);
В – постійна величина.
Більшість елементів АСР є нелінійними, мають нелінійні статичні
характеристики і описуються нелінійними рівняннями. Для спрощення аналізу
в багатьох випадках вдається їх лінеарізувати. Коли статична характеристика ОУ має вигляд безперервної кривої, то найбільш простим є графічний метод
ліанеарізації (рис.3.3).
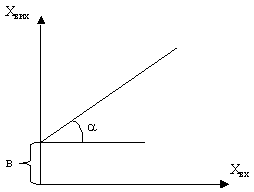
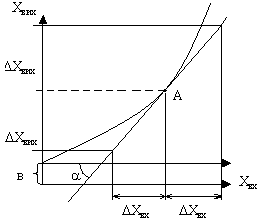
Рис. 3.2. Лінійна статична Рис. 3.3 Нелінійна статична
характеристика ОУ характеристика ОУ
У вузькому інтервалі зміни вхідної величини хв криву можна замінити дотичною до цієї кривої, яку можна розглядати як ділянку лінійної статичної характеристики. Лінеалізоване рівняння має вид:
Хвих = К Ххв, де К – коефіцієнт передачі об’єкту.
Можна отримати статичну характеристику, яка по каналу управляючої дії Ур, так і по збуренню: Хвих = Ку Ур та Хвих = Kз Z .
Коефіцієнти передачі Ку та Кз показують на скільки змінится вихідна величина ОУ під впливом зовнішніх дій ( керуючих або збурення ).