

2.4. Функціональна структура замкненої аср
На рис. 2.8 приведена більш детальна функціональна структура замкненої АСР з відхилення.
Вимірювальний елемент ВЕ, який утворює ланцюг зворотного зв’язку, вимірює значення регульованої змінної Хвих в об’єкті регулювання (ОР) або управління (ОУ), і перетворює значення Хвих на еквівалентний сигнал Хп іншої фізичної природи, який надходить на елемент порівняння ЕП. За допомогою задавача встановлюється рівень сигналу Хзад пропорційний необхідному (заданому) значенню регульованої змінної Хвих. Сигнал Хзад за звичаєм позначають як Хвх і він є вхідним сигналом системи.
У елементі порівняння ЕП (алгебраїчному суматорі) задане значення Хвх порівнюються із сигналом Хвих і сигнал непогодження (відхилення) Δх = Хвх - Хвих подається на вхід упраляючого елементу УЕ автоматичного регулятора (АР), який формує сигнал управління (регулюючу дію).
Залежність зміни регулюючої дії (сигналу управління ) Ур від велични
непогодження Δх і від часу (t) називається законом регулювання Ур=f( Δх,t).

Рис. 2.8. Функціональна структура замкненої АСР
Виконавчий механізм ВМ перетворює сигнал управління на переміщення регулювального органу РО, який безпосередньо змінює витрату або речовини, або енергії в об’єкт управління.
Таким чином об’єкт регулювання ОР з’єднується з входом регулятора за допомогою вимірювального елементу ВЕ, а з виходом регулятора через регулювальний орган РО. Вихідним сигналом АСР є поточне (плинне) значення регульованої змінної Хвих.
Найбільшою мірою якість регулювання в такій системі залежить як від властивостей об’єкту, так і від властивостей регулятора. В залежності від конструкції АСР в її склад можуть додатково вводитись різноманітні перетворювачі, наприклад, сигнал на вхід АР може надходити із вторинного приладу ВП. Але ці особливості не впливають на характер процесу регулювання. [8, c.: 82…87 ]
Контрольні питання до розділу 2
1. Наведіть та поясніть узагальнену структурну схему АСР.
2. Проведіть класифікацію АСР.
3. Основні принципи побудови АСР.
4. Наведіть структурну схему АСР з відхилення.
Розділ 3 об’єкти управління (регулювання)
3.1. Параметрична схема
Об’єкти управління (ОУ) та об’єкти регулювання (ОР) відзначаються
великою різноманітністю і їх розрізняють: 1) за фізико-хімічною природою
процесів, які в них відбуваються; 2) за принципом дії; 3) за конструкцією
обладнання та іншими факторами.
Це можуть бути, наприклад, теплові апарати, випарники, холодильні камери, в яких як правило регулюється температура або тиск, або гідравлічні об’єкти, де необхідно підтримувати постійним рівень, витрати або концентрацію. Незважаючи на велику різноманітність ОУ (ОР) суть процесу управління ними з математичної точки зору є однаковим.
Для прийняття найбільш раціональних (оптимальних) рішень на управління
будь-яким об’єктом задача управління ним формалізується, тобто, описується математичними залежностями.
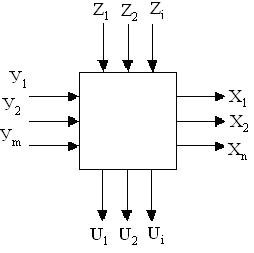
Рис.3.1. Параметрична схема ОУ
Для отримання необхідних математичних залежностей будь-який процес може бути зображений у вигляді параметричної схеми (рис. 3.1), на якій виділяються основні групи параметрів, що характеризують стан процесу в будь-який момент часу.
Параметрична
схема має вигляд квадрату, на сторонах
якого зображують: з правої сторони Xі
…
Xn
- вихідні регульовані змінні (параметри),
що характеризують стан процесу, в якому
він знаходиться під дією сумарної дії
вхідних керуючих (ліва сторона) У![]() …У
…У![]() та збурюючих Z
…Z
та збурюючих Z
…Z![]() (верхня сторона) параметрів. Регульовані
змінні Xі
– Xn
ще називають параметрами стану, а знизу
знаходяться параметри спостереження
(U1…Uі
). Дія на процес збурюючих параметрів,
як правило, є випадковою. Крім цього в
середині квадрату лініями із стрілочками
показують вплив кожного із керуючих та
збурюючих параметрів на кожну із
регульованих змінних.
(верхня сторона) параметрів. Регульовані
змінні Xі
– Xn
ще називають параметрами стану, а знизу
знаходяться параметри спостереження
(U1…Uі
). Дія на процес збурюючих параметрів,
як правило, є випадковою. Крім цього в
середині квадрату лініями із стрілочками
показують вплив кожного із керуючих та
збурюючих параметрів на кожну із
регульованих змінних.