

7.2. Термометри опору
Термометри опору використовують для вимірювання температури в межах від -260 до 750 °С. Вимірювання температури термометрами опору відноситься до контактних методів і грунтується на властивості провідників (металів) та напівпровідників змінювати свій електричний опір R в залежності від зміни їхньої температури (t). Резистори, які виготовлені із металу або напівпровідників (термістори) і які змінюють свій опір в залежності від їхньої температури називаються терморезисторами. В якості перетворювачів температури може використовуватись будь-який терморезистор або термістор, але в якості засобів вимірювання температури, тобто, засобів з нормованими метрологічними характеристиками (НМХ), використовують термометри опору (ТО). Термометрами опору називають терморезистори з НМХ.
Властивість терморезисторів змінювати свій опір від температури
характеризується температурним коефіцієнтом опору (ТКО), який визначається як відношення приросту опору dR терморезистора до приросту температури, що привела до цієї зміни при нагрівання, та до опору провідника R. В загальному вигляді ТКО при малих приростах температури dt визначається залежністю:
= (dR / dt)ּ(1/ R) (7.1)
Для провідників (металів) - ТКО додатний і їхній опір зростає з зростанням температури, а перетворювачі, які виготовлені із металевого дроту називають (в загальному) терморезисторами. У напівпровідників навпаки – ТКО від’ємний і їхній опір електричному струму падає із ростом температури, а перетворювачі, що виготовлені із напівпровідникових матеріалів, називають термісторами.
В більшості провідникових і напівпровідникових тіл залежність активного опору R від температури можна узагальнити формулою:
R = C ּ ekT, (7.2)
де С та k – коефіцієнти, значення яких залежить від матеріалу, з якого
виготовлений терморезистор; крім цього, С залежить від геометричних розмірів терморезистора, а коефіцієнт k для напівпровідників - залежить і від темпе-
ратури; е – основа натуральних логарифмів; Т – абсолютна температура, К.
На практиці, як правило, температуру вимірюють за шкалою Цельсія t(°C) і, використовуючи співвідношення: T(К)= t(°C) + 273.15, приведена залежність (7.2) активного опору від температури t(°C) приймає вигляд:
R = C ּ ek(273.15 + t) = C ּ e273.15k ּ ekt. (7.3)
Значення виразу: C ּ e273.15k = R0 – приймається за початковий опір тіла при
температурі 0С і відповідно: R = R0ּ ekt. (7.4)
Так як для провідникових термометрів коефіцієнт k не залежить від
температури, то формулу (4) можна переписати в іншому вигляді, розклавши її
в ряд Маклорена в залежності від температури:
R
= R0ּ
ekt
= f(0) +
![]() f
f![]() (0)
+
(0)
+
![]() f
f![]() (0)
+
(0)
+
![]() f
f![]() (0)
+…=
(0)
+…=
=
R0(1+
![]() t
+
t
+
![]() t
+
t
+
![]() t
t![]() +…)
=
R0
(1+
ּt
+ ּt2
+
γּt
+…),
(7.5)
+…)
=
R0
(1+
ּt
+ ּt2
+
γּt
+…),
(7.5)
де f(0) та f (0), f (0), f (0),... – значення функції (3) в нулі та частинні похідні.
ТО
виготовляють із чистих металів (міді,
платини, нікелю, вольфраму або заліза)
і вони відповідають наступним вимогам:
■
мають
монотонну без гістерезису характеристику
перетворення R
=
f(t);
■
мають
високий питомий електричний опір, а
метал ТО
не вступає до взаємодії з вимірюваним
середовищем;
■
мають
достатньо великий і незмінний в часі
ТКО
α,
який прийнято визначати для ТО
в інтервалі температур від 0 до 100 °C
по залежності: α=(R100-R0)/(R0*100),
де R0
та R100
- опір ТО при 0°C
та при 100 °C
відповідно,
Ом. Для більшості чистих металів ![]() 4*10
4*10![]() (1/С).
(1/С).
Найбільше поширені провідникові ТО, які виготовляють із чистих мідного дроту (використовуються для вимірювання температури від –50 до +180С)
або із платинового – для температур від -260 до +650С.
ТО (рис. 7.4,а) являє собою дріт 1 певної довжини і діаметром 0,07мм, який намотується на стержень 2 із ізоляційного матеріалу (наприклад, слюди) безіндуктивним методом, тобто, біфілярно (в два проводи, одночасна подвійно-зустрічна намотка) і який є чутливим елементом. Чутливий елемент ТО розмі-щують (рис.7.1,в) в корпус 1 (кожух) із нержавіючої сталі (конструкція схожа з термопарами), який має різьбове з’єднання 2 для його кріплення до металевих стінок технологічного обладнання та головку 6, в якій розміщують клеми під’єднання зовнішніх проводів. Для вимірювання температури в системах вентиляції і в приміщеннях, виготовляють спеціальні ТО, кожух 1 яких перфорується, для швидкого доступу повітря до ТО.
Залежність опору R=f(t) ТО від температури називається характеристикою градуювання. Для мідних ТО ця залежність має вигляд із двох членів формули (7.4):
Rм = R0м ּ (1+t), (7.6), де = 4,26ּ10-3 1/С.
Для платинових ТО залежність опору від температури визначається трьома
членами формули (4) для температур 0С:
Rn = R0n ּ (1+ּt+ּt2), (7.7)
де = +3,968ּ10-3 1/С; = -5,847ּ10-7 1/С.
При вимірюванні температур < 0С – характеристика градуювання ТСП:
Rn = R0n ּ (1+ּt+ּt2 + γּt3) (7.8), де γ = γ1ּ(t – 100).
ТО мають при виготовленні нормоване (стандартизоване) значення R0 при
0С і зображуються як ТСМ для мідного дроту та ТСП – для платинового.
ТО із міді виготовляються із нормованим значенням опору R0м на 10, 50, та
100 Ом і їм присвоєні умовні позначення: 10М, 50М, 100М. Платинові ТО теж
мають нормовані значення R0n при температурі 0С і, по аналогії з мідними, в залежності від R0n мають позначення: 1П, 5П, 10П, 50П, 100П, 500П.
Всі типи ТО виготовляються як взаємозамінні і для цього їхні типи, основні
параметри та розміри регламентуються відповідним стандартом. Основними параметрами для забезпечення взаємозамінності ТО є допуски на відхилення їхнього опору при температурі 0С (R0) від номінального значення, що
відповідає приведеним вище значенням для кожного ряду, та допуски на
коефіцієнт W100, який визначається відношенням: R100/R0, тобто, відношенням опору ТО при температурі 100С до його опору при 0С і який залежить від чистоти дроту, із якого виготовлений ТО. Наприклад, для ТСМ 50 коефіцієнт W100 = 1,426; а для ТСП 50 – W100 = 1.391.
Платинові ТО випускаються першого класу (використовуються як зразкові і еталонні, наприклад, допустиме відхилення опору R0n такого ТО від номінального значення не повинно перевищувати 0,05%, а відношення опорів R100/R0 повинно дорівнювати 1,391 0,0007) та другого класу (використовуються як технічні), а мідні випускаються тільки 2-го та 3-го класів і використовуються як технічні термометри з абсолютними похибками
від 0.3... 0.5С до 1...2 С.
В якості вимірювальних приладів, які використовуються у комплекті з ТО,
використовуються врівноважені і неврівноважені мости, логометри та
сучасні вимірювальні перетворювачі з уніфікованим вихідним сигналом.
Луцьке НВО "Електротермометрія" випускає мідні термометри серії ТСМ (50М), платинові - серії ТСП (50П) різних модифікацій на різні межі вимірювань та різних конструктивних особливостей. Виготовляються мідні та платинові термометри типів ТСМУ-0288(0289) та ТСПУ-0288(0289) з нормувальними перетворювачами з вихідним уніфікованим сигналом по струму 4...20 мА, а також мідні та платинові типів ТСМУ-0388 і ТСПУ–0388 з гальванічною розв’язкою між джерелом живлення та виходом і мають десятирозрядний послідовний інтерфейсний вихід. ТО поставляються з комплектом монтажних частин під трубний та кабельний монтажі. Діаметр захисної гільзи всіх ТО може становити 8 і 10 мм.
НВФ «АГАТ-1» (м. Харків) випускає ТО серії ДТ1 КВАНТ із уніфікованими вихідними сигналами, які випускаються у звичайному чи вибухозахищеному, пило- і водо захищеному та вібростійкому виконаннях і які використовуються також на об’єктах ядерної енергетики. Довжина заг-либної в об’єкт частини ТО може становити: 80; 100; 120; 160; 200; 250; 320; 400; 500 і більше мм (обумовлюється замовленням). У разі потреби вітчизняні ТО теж можуть виготовлятись з цифровою індикацією (позначення - ДТЦ1) за місцем (по аналогії з TF2) або з виносним блоком цифрової індикації.
Межі основної допустимої похибки ТО можуть становити 0,25; 0,4; 0,5; 0,6 або 1%. Середнє напрацювання ТО на відмову – до 150 000год. Кліматичне виконання (по замовленню) дозволяє застосовувати їх за умови
зміни температури навколишнього середовища в межах від -40С до +125С.
Як вимірювальні (вторинні) прилади, що застосовуються в комплекті з термометрами опору, використовуються логометри та урівноважені мости.
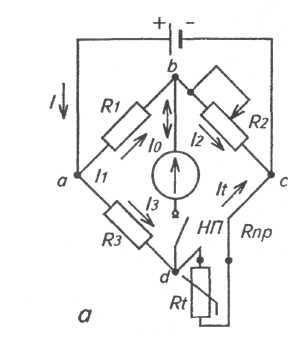
Принципову схему урівноваженого моста показано на рис. 7.3,а.
 в)
в)
Рис. 7.3. Принципові схеми а) урівноваженого моста з термометром опору,
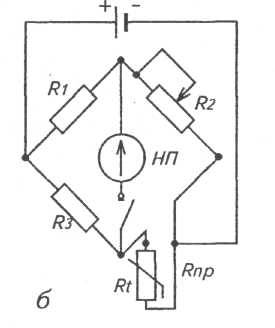
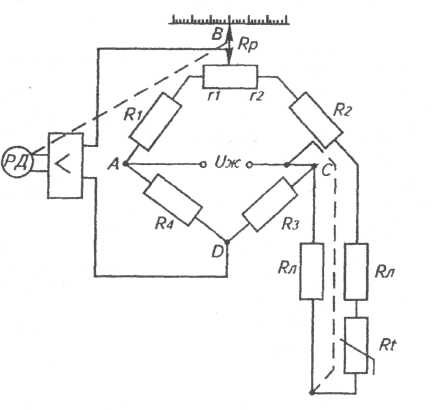
б) – за трьох-дротовою схемою ввікнення; в) спрощена принципова схема автоматичного моста
Міст складається з постійних резисторів R1 та R3, реохорда R2 та термометра опору Rt, та з’єднувальних дротів 2Rпр. В одну діагональ моста ввімкнено джерело постійного струму Е, а в другу - нуль-прилад НП (чутливий гальванометр). Умовою рівноваги моста є відсутність напруги в діагоналі bd і відповідно сили струму через НП. Як наслідок такої рівноваги моста є рівність добутків опорів його протилежних плечей: R1(Rt +2 Rпр) = R2*R3.
Зі зміною температури в об’єкті змінюється й опір Rt , міст виходить з
рівноваги і в діагоналі bd потече струм , стрілка приладу НП відхиляється. Щоб повернути міст до рівноваги, необхідно змінювати опір реохорда R2 до тих пір, доки стрілка приладу не стане на нуль. Такий спосіб урівноважування мостової схеми називається порівнянням. Опір Rt термометра дорівнює:
Rt = R2 (*R3/R1) - 2Rпр.
Таким чином, кожному значенню Rt, відповідає певне значення R2.
Для зменшення впливу температури навколишнього середовища на опір з’єднувальних дротів Rпр використовується трьох-дротова схема включення термометра (рис. 7.3,б), в якій одну з вершин живлення моста переносять безпосередньо до термометра. Умова рівноваги в цьому випадку буде мати вигляд: R1 (Rt + Rпр ) = (R2 + Rпр ) R3.
Суть такої схеми з’єднання в тому, що дроти лінії з’єднання з опорами Rпр (для рис.7.3,б) тепер входять у суміжні плечі мостової схеми. Якщо в мостовій схемі R1 = R3, то розкривши дужки останньої умови, отримуємо, що Rt = R2 .
У автоматичних урівноважених мостах (рис. 7.3,в) переміщення повзного
контакту реохорда для урівноваження моста виконується за допомогою автоматичної системи слідкування.
Схема складається з наступних елементів: R1, R2, R3. та R4 - постійні опори моста; Rt - термометр опору; Rпр - опір з’єднувальних дротів; Rр – опір реохорду: частини якого (r1) включена в плече АВ, а інша частина (r2) - в плече ВС; Uж - джерело стабілізованого живлення, яке включено в діагональ АС моста; ЕП — електричний підсилювач, включений в вимірювальну діагональ моста ВD; РД - реверсивний двигун, ротор якого через редуктор переміщує повзний контакт реохорда. Такий спосіб балансування мостової схеми, коли одночасно змінюються опори в плечах АВ та ВС, а вершина моста знаходиться на повзному контакті реохорду називається способом відношення.
Зі зміною температури в об'єкті змінюється опір термометра Rt. При цьому порушується рівновага моста і на вхід підсилювача ЕП з діагоналі ВD моста надходить сигнал небалансу. Цей сигнал підсилюється підсилювачем ЕП, який управляє реверсивним двигуном РД, що переміщує движок реохорда Rр доти, поки напруга небалансу на вході електронного підсилювача не буде дорівнювати нулю. Одночасно з переміщенням движка реохорда переміщується і показуюча стрілка.
Автоматичні урівноважені мости є технічними приладами досить високого класу точності (0,25; 0,5; 1,0). Випускаються такі типи автоматичних мостів: КВМ2, КСМ1, КГТМ1, КСМ2, КСМЗ, КСМ4.