

5.6. Виконавчі та регулювальні органи аср
Виконавчі органи (ВМ) призначені для переміщення регулювального органу (РО) відповідно до команди автоматичного регулятора (АР), тобто, його регулюючої дії Ур. ВМ перетворює сигнал однієї природи, який надходить від АР, у механічне переміщення РО. Його можна розглядати як підсилювач потужності, за допомогою якого слабкий сигнал управляючої дії АР Ур багаторазово підсилюється за рахунок енергії живлення ВМ та подається на РО. Для оцінки ВМ використовують наступні показники:
швидкодія ВМ – величина, що обернена часу переходу ВМ від одного стану рівноваги до іншого;
точність ВМ – величина, що обернена максимально можливій похибці встановлення ВМ в новий стан рівноваги;
максимальне навантаження – найбільший момент зусилля, який може передати ВМ на РО;
коефіцієнт корисної дії – відношення потужності, що використовується для
переміщення РО, до загальної потужності, яка споживається ВМ;
зона нечутливості – область, в межах якої зміна управляючої дії не призводить до руху ВМ.
Залежно від роду енергії, яка використовується в ВМ, вони розподіляються на електричні, пневматичні і гідравлічні.
Електричні ВМ (використовують електричну енергію) в свою чергу поділяється на електромагнітні та електродвигуні. В електромагнітних переміщення РО відбувається за рахунок дії електромагнітними котушками ЕК. Використовуються у випадку, коли РО повинен займати фіксоване положення, наприклад, “Відкрито” або “Закрито” в релейних двопозиційних АСР.
Коли до електромагнітної котушки подається керуючий сигнал Ур постійного чи змінного струму, шток втягується в котушку соленоїду, стискуючи одночасно пружину, клапан повністю відкривається. Коли Ур зникає, то за допомогою пружини клапан встановлюється у закритий (вихідний) стан.
Н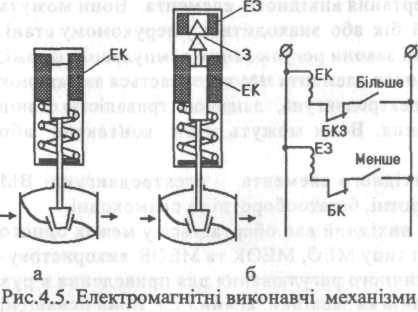 едолік
таких ВМ
(рис.5.9,а) – постійне споживання енергії,
низький ККД, тому вони використовуються
в схемах з короткочасним спрацюванням.
едолік
таких ВМ
(рис.5.9,а) – постійне споживання енергії,
низький ККД, тому вони використовуються
в схемах з короткочасним спрацюванням.
Більш економічні – є ВМ (рис.5.9,б) з додатковою електромагнітною защіпкою ЕЗ, який керує механічною защіпкою. Коли головний електромагніт спрацьовує від керуючої дії Ур (втягується) то одночасно спрацьовує защіпка (З), яка механічно
Рис. 5.9
фіксує шток в цьому положенні. Блокуючий контакт (БКЗ) защіпки розриває ланцюг живлення головної котушки ЕК.
При закриванні клапана керуючий сигнал подається на електромагніт защіпки ЕЗ, яка звільняє шток. Останній під дією зворотної пружини повертається у вихідний стан, закриваючи клапан.
Недолік – ймовірність виникнення гідравлічних ударів у трубопроводах.
Більш поширеними є електродвигунові ВМ, які працюють з електричними регуляторами.
В них використовуються електродвигуни з постійною швидкістю обертання вихідного елемента (ротора через редуктор), які можуть обертатись в той чи інший бік, або знаходитись в нерухомому стані.
Електродвигунові ВМ реалізують типові закони регулювання в імпульсній формі, коли переміщення вихідного елемента (вала редуктора) ВМ, відбувається за рахунок короткочасних ввімкнень електродвигуна (з певною тривалістю станів включення чи відключення).
Керування двигунів таких ВМ може бути контактне чи безконтактне. За характером руху вихідного вала такі ВМ розділяють на – однооборотні, коли вихідний вал ВМ обертається у межах одного оберту на 360°, а також на багатооборотні та прямо ходні.
Електродвигуновий ВМ (рис. 5.10) складається з електродвигуна 3 з електромагнітним гальмом 4, блока 5 з кінцевими вимикачами, черв'ячного редуктора 2 та вихідного вала редуктора 1, який з'єднується з регулюючим органом. Пуск двигуна в той чи інший бік обертання забезпечується контактами 1РБ або 2РБ реле автоматичного регулятора. При цьому вмикаються обмотки В або Н реверсивного магнітного пускача і замикаються його силові контакти В0 або НО, які включають в мережу електродвигун Д. Блок-контакти ВІ та НІ шунтують контакти регулятора. Двигун вимикається, коли вихідний вал редуктора досягає крайніх положень, кінцевими вимикачами КВВ та КВЗ, при цьому загорається відповідно одна з сигнальних ламп ЛВ або ЛЗ. Кнопка КС призначена для аварійного відключення двигуна.

Рис.5.10. Електродвигуновий виконавчий механізм
Пневматичні та гідравлічні ВМ відносяться до механічних. По конструкції


а) б)
Рис. 5.11. Мембранні виконавчі механізми
бувають мембранні та поршневі. Вихідним елементом в них є шток, який здійснює лінійне переміщення. У пневматичних ВМ – зусилля, по переміщенню мембрани або поршня, створюється повітрям – уніфікованим по ДСП пневматичним сигналом по тиску в межах Рупр = (20-100) кПа.
Приклад мембранного пневматичного ВМ приведений на рис. 5.11,а) :
Цей ВМ складається з корпусу 1, мембрани 2, зворотної пружини 3 та штока 4. Втулка з натяжною гайкою 5 призначена для регулювання зусилля, що надається пружиною. З поданням тиску від регулятора у порожнину над мембраною, остання вигинається і переміщує шток 4. Повернення штока в початкове положення забезпечується за допомогою пружини при Рвх=0.
У прикладі на рис.5.11,б із зростанням Ур= Рупр верхній клапан ВМ
закривається, а нижній - відкривається, при одному і тому ж напрямку керуючої дії, що показує, як можна реалізувати протилежні дії на об’єкт регулювання.
Поршневий пропорційний ВМ (рис. 5.12) теж має пропорційну статичну
Рис.5.12. Поршневий пропорційний Рис. 5.13. Поршневий диференціальний
характеристику і використовується в пілотних регуляторах прямої дії в холодильних машинах, де джерелом енергії є тиск робочої речовини холодильної машини. А поршневий диференціальний ВМ показаний на рис. 5.13. Його рівняння: dL/dt = k ΔP , де ΔP = Рупр1 - Рупр2.
Регулювальні органи (РО) АСР - це пристрої, які служать для безпосереднього регулювання надходження енергії або речовини в ОУ. РО змінюють, наприклад, витрати речовини через той чи інший трубопровід, або холодопродуктивність компресора. Зміна витрати досягається зміною прохідного перерізу РО (або дроселюванням) і пов’язаного з ним перепаду тиску. В АСР використовуються одно або двосідельні РО (рис. 5.14).
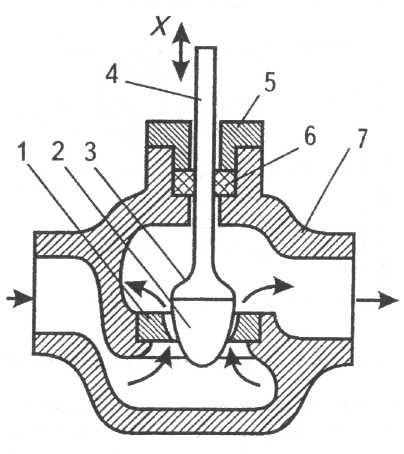
Рис. 5.14. Одно та двосідельні РО (клапани).
В якості РО використовують клапани та вентилі, заслінки. Від вірного вибору РО залежить якість роботи АСР. РО складається із сідла (нерухомої частини РО) та затвору - (рухомої частини РО), переміщення якого відносно частин сідла приводить до зміни прохідного перерізу і відповідно пропускної спроможності РО в цілому.
На вибір та розрахунок РО впливає і фазовий стан протічної речовини. Якщо середовище двохфазне або якщо при його протіканні через РО відбувається фазове перетворення (кипіння речовини), то вибір і розрахунок РО проводять за емпіричними залежностями.
Як елемент АСР РО може мати дискретну (релейну: Відкрито/Закрито) характеристику або аналогову характеристику (безперервну), яка може бути лінійною, параболічною або рівно процентною. Характеристика РО показує зміну його пропускної спроможності в залежності від (ходу) переміщення затвору РО (рухомої частини). Характеристику називають власною або внутрішньою, якщо вона визначена для одного значення перепаду тиску на РО.
[ 2, с.: 9…37 ; 7, с.: 82…122]
Контрольні запитання до розділу 5
1. Приведіть класифікацію систем автоматичного регулювання.
2. Поняття статичної похибки системи регулювання.
3. Поняття ланки АСР та її передавальна функція.
4. Типові ланки систем автоматичного регулювання.
5. Паралельне та послідовне з’єднання ланок АСР.
6. Критерії визначення стійкості АСР.
7. Основні показники якості регулювання в АСР.
РОЗДІЛ 6