

5.3. З'єднання ланок та алгоритмічні структурні схеми автоматичних систем
За допомогою типових динамічних ланок можна подавати не тільки окремі елементи системи, але й всю систему в цілому. Блок-схема системи, яка складається з окремих типових ланок, називається алгоритмічною структурною схемою і становить динамічну модель системи.
Основою алгоритмічної схеми АСР є функціональна блок-схема автоматичної системи, але в прямокутниках замість функціональної ознаки елементів записуються їхні передавальні функції. Елементи порівняння на алгоритмічній схемі зображуються так, як і на функціональній.
З алгоритмічною структурною схемою можна визначити передавальну функцію всієї системи та рівняння динаміки. Для цього треба знати правила перетворення структурних схем.
За умов послідовного з’єднання елементів:
![]()
W(р)
- результуюча передавальна функція;
W![]() (р)
W2(р).., W
(р)
W2(р).., W![]() (р)
- передавальні функції елементів; Д -
знак добутку.
(р)
- передавальні функції елементів; Д -
знак добутку.
![]()
За умови охоплення зворотним зв’язком:
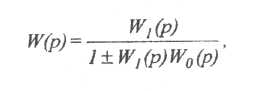
де W1(р) і W0(р) - відповідно передавальні функції з’єднання, що
охоплюється зворотним зв’язком, і кола зворотного зв’язку. Якщо зворотний зв’язок від’ємний, ставлять знак плюс, за умов додатного - мінус.
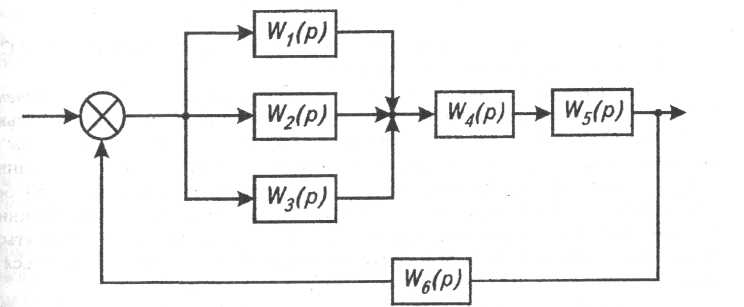
Рис. 5.6. Алгоритмічна структурна схема складної системи
Використовуючи наведені залежності можна АСР будь-якої складності звести до узагальненого елемента розімкненої системи Wр(р), охопленого
зовнішнім зворотним зв’язком Wзз(р), який з’єднує вихід системи зі входом.
Передавальна функція замкненої системи Wз(р) має вигляд:
Wз(р)
=
![]() .
.
Як приклад, розглянемо алгоритмічну структурну схему складної системи (рис. 5.6) і визначимо загальну передавальну її функцію.
Визначаємо передавальну функцію паралельно з’єднаних елементів:
![]()
Потім визначимо передавальну функцію послідовно з'єднаних елементів
![]()
Загальна передавальна функція системи:
![]()
5.4. Перехідні процеси в замкненій аср
В замкненій АСР, з появою на вході об'єкта регулювання збурення, на його виході з'являється відхилення регульованої змінної та починає працювати автоматичний регулятор, з метою компенсації цього збурення. Таким чином, в АСР виникає перехідний процес (наприклад, рис. 5.7). Він може бути аперіодичним, коливальним затухаючим (збіжним), коливальним незатухаючим з постійною амплітудою та коливальним з наростаючою амплітудою (незбіжним).
Р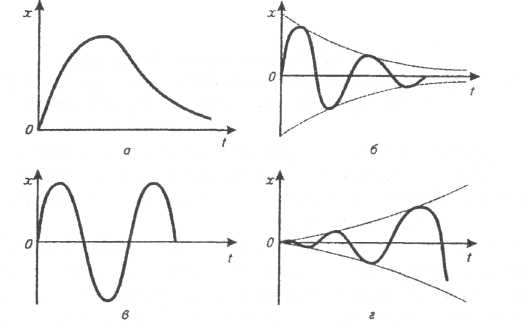 ис.
5.7. Графіки перехідних процесів:
ис.
5.7. Графіки перехідних процесів:
а - аперіодичний; б - коливальний затухаючий; в – коливальний незатухаючий; г - коливальний наростаючий.
За умов аперіодичного перехідного процесу (рис. 5.7, а) регульована величина змінюється плавно і прямує до стану рівноваги, не переходячи через нього. Такі процеси можуть відзначатися великою тривалістю. За умов коливального затухаючого процесу (рис. 5.7, б) регульована зміна прямує до сталого значення, здійснюючи коливання з амплітудою, що поступово зменшується.
Якщо в перехідному процесі мають місце коливання з наростаючою амплітудою (рис. 5.7, г), то така система непрацездатна, тому що з часом відхилення регульованої змінної від заданого значення не зменшується, а зростає. Такі АСР називаються нестійкими. Якщо в системі виникає перехідний коливальний процес з постійною амплітудою коливань (рис. 5.7, в), то така АСР знаходиться на межі стійкості. Вона також непрацездатна. До стійких АСР відносяться системи, в яких протікають тільки аперіодичні або
коливальні затухаючі перехідні процеси.
Характер
перехідного
процесу залежить від зовнішніх збурень
і від властивостей самої системи.
Перехідний процес в системі можна
показати
двома складовими, одна з яких
![]() характеризує власні властивості системи,
а друга
характеризує власні властивості системи,
а друга
![]() -
вплив збурюючих дій:
-
вплив збурюючих дій:
![]()
![]() =
+
.
=
+
.
Система буде стійкою, якщо перехідна складова системи з часом
прямуватиме
до нуля. Таким чином, висновок про
стійкість лінійної системи можна зробити
шляхом
розв'язання рівняння динаміки системи,
яке, в загальному випадку, описується
звичайним диференціальним рівнянням
![]() -го
-го
порядку з постійними коефіцієнтами:
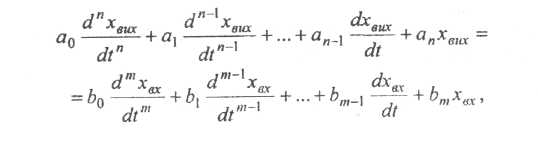
де
х![]() і хвих
–
відповідно вхідна (управляюча чи
збурююча) та вихідна регульована
величини; а0,
а
...
ат
;b
і хвих
–
відповідно вхідна (управляюча чи
збурююча) та вихідна регульована
величини; а0,
а
...
ат
;b![]() ,
b
,
..., b
- постійні
коефіцієнти цього рівняння, що залежать
від параметрів системи;
та
,
b
,
..., b
- постійні
коефіцієнти цього рівняння, що залежать
від параметрів системи;
та
![]() - порядок похідних,
<
.
У операторній формі це рівняння
має вигляд (12.6):
- порядок похідних,
<
.
У операторній формі це рівняння
має вигляд (12.6):
 (12.7)
(12.7)
Останнє рівняння (12.7) називають характеристичним.
Розв’язок такого рівняння становитиме суму експонент, степені яких є коренями характеристичного рівняння (12.7), помноженими на час:
![]() =
=
![]() ,
,
де
![]() - постійні інтегрування;
- постійні інтегрування;
![]() - корені рівняння.
- корені рівняння.
Корені характеристичного рівняння можуть бути дійсними, уявними та
комплексними (мати дійсну та уявну частини). Математично доказано, що для забезпечення стійкості АСР дійсні корені, або їхня частина у комплексному корені, повинні бути від’ємними. При чисто дійсних коренях перехідні процеси в АСР аперіодичні і така АСР є стійкою. Якщо корені уявні, то АСР нестійка і в ній виникають гармонічні коливання постійної амплітуди. При комплексних коренях – в системі має місце коливальний (збіжний або ні) перехідний процес.
Значення цих коренів залежить від параметрів АСР, а також від налаштування регуляторів, що дозволяє цілеспрямовано змінювати
властивості АСР і робити їх стійкими.
Обчислення коренів характеристичного рівняння порівняно просте для АСР першого та другого порядків, а для вищих порядків приводить до громіздких розрахунків, тому для аналізу стійкості будь-якої системи, розроблені спеціальні критерії стійкості. Критерій стійкості – це непряма узагальнена оцінка, за допомогою якої просто виконується аналіз стійкості
АСР.
Перш
ніж розглянути один із критеріїв,
необхідно відмітити, що необхідною
умовою стійкості системи будь-якого
порядку є позитивність всіх коефіцієнтів
характеристичного рівняння (12.6), тобто,
а![]() >0,
a
>0,
… , a
>0.
Для систем першого та другого порядків
ця необхідна умова є і
>0,
a
>0,
… , a
>0.
Для систем першого та другого порядків
ця необхідна умова є і
достатньою умовою стійкості.
Розглянемо
один із найбільш широко вживаних -
алгебраїчний критерій стійкості Гурвіца.
Він дає змогу визначити стійкість
системи, аналізуючи коефіцієнти
характеристичного рівняння цієї системи.
Для цього з коефіцієнтів характеристичного
рівняння (12.6) складають головний визначник
(матрицю)
![]() Гурвіца:
Гурвіца:
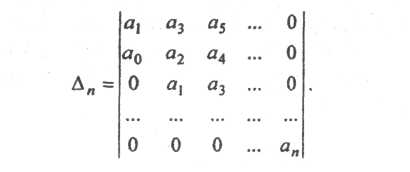
По головній діагоналі вписують коефіцієнти, починаючи від а до а . Колонки від елементів головної діагоналі вгору доповнюють коефіцієнтами з послідовно зростаючими індексами, униз — з індексами, що зменшуються. Всі вільні місця заповняють нулями.
У головному визначнику обводять, так звані, мінори і отримують
визначники
нижчих порядків, починаючи із першого![]() ,
що відповідає першому порядку і має
тільки один елемент (верхній зліва) –
коефіцієнт а
,
тобто,
=
а
.
Наступний мінор другого порядку
,
що відповідає першому порядку і має
тільки один елемент (верхній зліва) –
коефіцієнт а
,
тобто,
=
а
.
Наступний мінор другого порядку
![]() об’єднує
вже чотири коефіцієнти – два зліва у
верхньому рядку (а
та
а
об’єднує
вже чотири коефіцієнти – два зліва у
верхньому рядку (а
та
а![]() ),
та а
і а
),
та а
і а![]() - у другому рядку. Такими послідовними
діями
(по аналогії, наступний визначник
- у другому рядку. Такими послідовними
діями
(по аналогії, наступний визначник
![]() об’єднує вже 9 коефіцієнтів) одержують
(n-1)
визначник.
Система буде стійкою, якщо за а
>0
всі
визначники будуть додатні, тобто:
об’єднує вже 9 коефіцієнтів) одержують
(n-1)
визначник.
Система буде стійкою, якщо за а
>0
всі
визначники будуть додатні, тобто:
>
0;
>
0;
>
0;…;
![]() > 0
. (5.4.1)
> 0
. (5.4.1)
Визначником, наприклад, другого порядку позначають вираз = а а -а а .
Умова(5.4.1) є необхідною і достатньою.
Розглянемо три приклади визначення стійкості для найпростіших систем:
![]()
умова стійкості: позитивність всіх коефіцієнтів характеристичного рівняння.
![]()
