

5.2. Основні ланки лінійних аср
1) Cтатична ланка першого порядку (або аперіодична).
Динамічна характеристика описується диференційним рівнянням першого
порядку
у стандартній (канонічній) формі:
![]() ,
де Т
– стала часу ланки, характеризує
швидкість перебігу перехідних процесів,
є мірою інерційності ; к - коефіцієнт
підсилення ланки.
,
де Т
– стала часу ланки, характеризує
швидкість перебігу перехідних процесів,
є мірою інерційності ; к - коефіцієнт
підсилення ланки.
Застосовуємо операторну форму запису:
![]()
![]()
![]()
![]() ;
;
![]()
Перехідна характеристика (крива розгону):
![]()
Г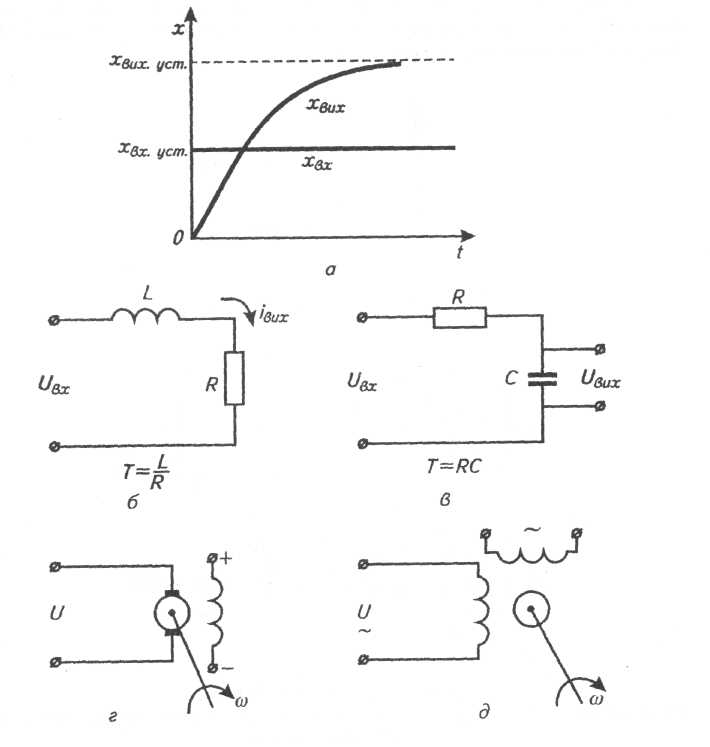 рафік
кривої розгону – експонента. За умов
стрибкоподібної зміни вхідної величини
– вхідна змінюється повільно, відстаючи
від вхідної, тому такі ланки називають
інерційними (рис.5.1).
рафік
кривої розгону – експонента. За умов
стрибкоподібної зміни вхідної величини
– вхідна змінюється повільно, відстаючи
від вхідної, тому такі ланки називають
інерційними (рис.5.1).
Рис.5.1. Крива розгону та приклади інерційних ланок :
а) крива розгону;
б-в) LR та RC – ланцюги (вхідна величина є напруга живлення, а вихідна –струм); електродвигуни постійного струму з незалежним збудженням;
г-д) вхідна величина - напруга живлення, а вихідна - швидкість обертання.
2) Статична ланка нульового порядку (підсилювальна ланка)
Рис.5.2. Безінерційні ланки: а) - крива розгону; - б) редуктор;
в) -подільник напруги;
г) - електронний підсилювач; д) - важільна передача.
Це безінерційні ланки з рівнянням динаміки: Хвих = к Хвх ,
де к – коефіцієнт підсилювання ланки.
Передавальна функція: W(р) = к. З подачею на вхід стрибко-подібного сигналу вихідна величина без запізнення повторює зміну вхідної.
3)Астатична (інтегрувальна) ланка 1-го порядку
Диференційне
рівняння динаміки:
![]() або
або
![]()
і
відповідно:
![]() ;
;
![]() .
.
Перехідною характеристикою інтегруючої ланки є пряма, що проходить через початок координат під кутом α до осі часу tgα = k (рис.5.3 , а).
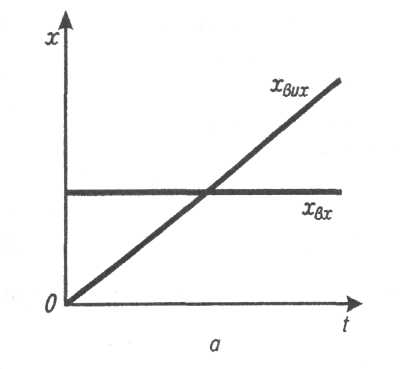
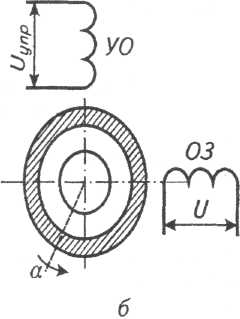
Рис.5.3. Інтегруючі ланки: а - крива розгону; б – електродвигун.
Приклад астатичної – електродвигун, коли вихідним сигналом є напруга управління, а вихідним – кут α повороту ротора.
4) Диференціювальна ланка
Диференціювальною називається ланка – в якій вихідна величина
пропорційна швидкості зміни вхідної Хвих(t) = k (Хвх/dt )(це ідеальна ланка). Відповідно: Хвих = k p Хвх; W(p) = k р.
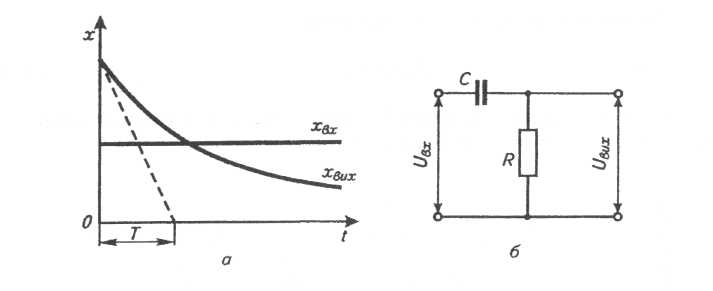
Рис. 5.4. Реальна диференціювальна ланка: а - крива розгону; б – RC-контур.
Регульована змінна її прямує до ∞ (при Δt>0). Такий перехідний процес
неможливий, тому на практиці використовуються реальні диференціювальні ланки (рис. 5.4).
5) Коливальна ланка. Динамічні властивості цієї ланки (рис. 5.5) описуються рівнянням:

де Т1, Т2 - сталі часу; k - коефіцієнт підсилювання.
У операторній формі рівняння має вигляд:
![]()
Передаточна
функція:
![]()
До коливальної ланки відносяться пристрої, в яких вихідна величина після
подавання на вхід стрибкоподібного збурення прямує до усталеного
значення, здійснюючи коливання. Ця ланка складається якби з двох елементів, що можуть акумулювати енергію або речовину та обмінюватись нею між собою.

Рис. 5.5 Коливальна ланка: а) – крива розгону за умови Т1<2Т2; б) –сполучені посудини; в) – вантаж масою m; підвішний на пружині; г) – крива розгону за умови Т1>2Т2; д) – контур RLC.
Якщо Т1<2Т2, перехідний процес буде мати вигляд затухаючих коливань. За умов Т1>2Т2перехідний процес не буде коливальним, в цьому випадку ланка буде називатися аперіодичною другого порядку (рис. 5.5, а, г). Якщо Т1=0, то ланка називається консервативною і перехідний процес являє собою гармонічні коливання з постійною амплітудою. Прикладами коливальних ланок можуть бути (рис. 5.5, б, в, д); сполучені судини; вантаж з масою m, підвішений на пружині; електричний контур RL або RС.
6) Ланка чистого запізнювання. Вихідна величина ланки повторює зміну вхідної величини, але з деяким постійним запізнюванням (рис. 5.5). Рівняння
ланки та передаточна функція мають вигляд:
Хвих (t) = Хвх(t - τ),
де t та (t—τ) - не множники, а символи; τ - чисте запізнювання.

![]()
Рис. 5.5. Ланка чистого запізнювання
Прикладами ланок чистого запізнювання можуть бути трубопровід,
транспортер та ін.