

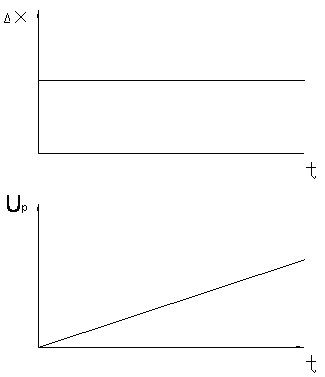
4.3. Графік процесу регулювання п-регулятора
Інтегральні
регулятори, для
яких управляюча дія пропорційна інтегралу
відхилення від регульованої величини
і дорівнює:
 ,
,
де Ті -стала ізодрому налаштування регулятора.
Після
диференціювання
![]() видно, що швидкість переміщення РО
для І-регуляторів
пропорційна відхиленню регульованої
змінної. Регулююча дія продовжується
доти, поки регульована змінна не
повернеться до заданого значення, тобто,
поки Δх
не стане рівним нулю.
видно, що швидкість переміщення РО
для І-регуляторів
пропорційна відхиленню регульованої
змінної. Регулююча дія продовжується
доти, поки регульована змінна не
повернеться до заданого значення, тобто,
поки Δх
не стане рівним нулю.
Недоліки І-регуляторів – є уповільненість його дії і застосовуються на ОР з малим запізнюванням при повільних змінах навантаження. Використання на інтегральних об’єктах може привести до втрати системою стійкості.
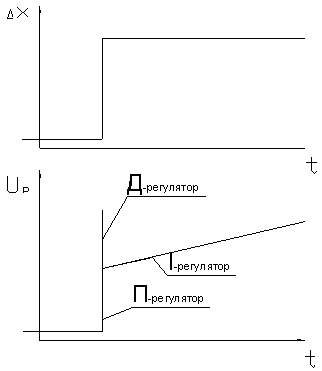
У динамічному відношенні І-регулятори є інтегруюча ланка, а крива розгону має приведена на рис 4.4,а. На цьому ж рисунку (4.4,б) показані графіки, що показують різницю процесів регулювання в системах з пропорційним та інтегруючим регулятором в замкненій системі.
При стрибкоподібних діях збурення Δz або управляючої дії ΔУp, об’єкт регулювання надходить у новий стан рівноваги. Причому вихідна регульована змінна хвих для І-регулятора, після закінчення регулювання, залишиться незмінною, а у П-регулятора прийме значення хвих. Різницю Δх= хвих2- хвих - позначають статичною похибкою, або статизмом П-регулятора.
Розглянуті два класи регуляторів є основними. Для покращення якості
регулювання використовують чотири інші регулятори, які прискорюють
 а)
а)
 б)
б)
Рис. 4.4. Крива розгону І-регулятора а) та порівняльні графіки б).
перехідні процеси та зменшують динамічні відхилення (перерегулювання).
В цих регуляторах формуються управляючі дії за складнішими (комбінованими) законами регулювання. Лінія зворотного зв’язку (ЛЗЗ рис.4.1) має більш складні елементи, ніж звичайний підсилювач.
Пропорційно-інтегральні регулятори (ПІ-регулятори). У них управляюча дія пропорційна як непогодженню Δх так і інтегралу від нього:
.
Після
диференціювання отримуємо:
![]() .
.
Аналізуючи
бачимо, що процес регулювання (![]() ),
починається як і в системі з П-регулятором,
коли почне змінюватись непогодження
Δх,
тобто
,
але закінчиться процес регулювання
лише тоді, коли обидві складові правої
частири виразу будуть рівні нулю, тобто,
на відміну від П-регулятора, коли і Δх=0.
За рахунок цього
ПІ-регулятор
ліквідує статичну похибку, але час
регулювання приблизно вдвічі більший
ніж у П-регулятора.
),
починається як і в системі з П-регулятором,
коли почне змінюватись непогодження
Δх,
тобто
,
але закінчиться процес регулювання
лише тоді, коли обидві складові правої
частири виразу будуть рівні нулю, тобто,
на відміну від П-регулятора, коли і Δх=0.
За рахунок цього
ПІ-регулятор
ліквідує статичну похибку, але час
регулювання приблизно вдвічі більший
ніж у П-регулятора.
У ПІ-регулятора використовується зворотній зв’язок не за положенням регулювального органу, як у П-регуляторах, а за швидкістю його переміщення, який називають гнучким, обо пружним зворотнім зв’язком. У цьому випадку дія зворотнього зв’язку повністю проявляється, у перехідному процесі регулювання, а потім, у статичному стані, зникає.
У динамічному співвідношенні ПІ регулятор складається із двох паралельно
з’єднаних між собою П та І регуляторів (рис. 4.5,б). Він починає роботу як П-регулятор, а закінчує як І-регулятор.
а)
 б)
б)
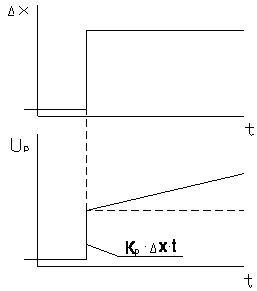
Рис. 4.5.Криві розгону для ПІД-регулятора (а) та ПІ-регулятора (б).
Під час появи відхилення Δх регулююча дія Up спочатку швидко змінюється на величину КрΔх, а потім буде змінюватись в тому ж напрямку з постійною швидкістю, яка залежить від часу ізодрому Ті до того часу, поки залишкове відхилення Δх→0.
ПІ-регулятори одні із найпоширеніших регуляторів безперервної дії. Застосовуються, коли необхідна висока точність регулювання в астатичних і статичних ОР.

Рис. 4.6. Криві розгону стичного об’єкта.
ПД -регулятор – є регулятором з упередженням, який діє на об’єкт по похідній від відхилення в часі. Регулятор до появи значного відхилення (непогодження) розпочинає переналаштовування регулюючого органу і таким чином зменшує динамічне відхилення.
В пропорційно-інтегральному-диференціальному регуляторі (ПІД) –
регулююча дія пропорційна відхиленню Δх регульованої змінної, інтегралу та диференціалу від нього.
Процес регулювання з ПІД-регуляторами починається вже під час появи сигналу про прискорення зміни відхилення Δх (рис. 4.5,а), регулююча дія Uр виробляється як би заздалегідь, не чекаючи значного відхилення. Завершується регулююча дія тільки при Δх=0.
Криві зміни регульованого параметру на одному й тому ж статичному об’єкті за умов дії різних регуляторів приведені на рис.4.6.