4.3. Регулятори непреривної дії та їхні характеристики
У регуляторів неперервної дії при безперервній дії сигнал на вході регулятора регулювальний орган також переміщується безперервно. Реалізують прості та комбіновані закони регулювання. В залежності від закону управляючої дії, який виробляє управляючий елемент регулятора, регулятори непереривної дії розділяють на:
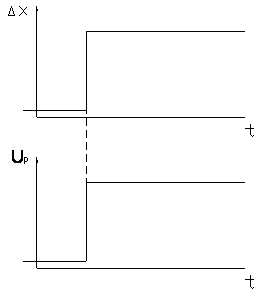
1) П-регулятори, або статичні в яких виробляється пропорційний закон, тобто, управляюча дія Up пропорційна сигналу непогодження: Up=Кр۰Δх;
2)
І-регулятори
(астатичні),або інтегральні:
 ;
;
3)
Д-регулятори
(диференціальні):
![]() ;
;
4)
ПІ-регулятори
(або ізодромні): ;
;
5)
ПД-регулятори
(пропорційно диференціальні):
![]() ;
;
6) ПІД-регулятори (пропорційно-інтегрально-диференціальні):
 .
.
У пропорційних регуляторах (П) регуляторах
Up=Кр۰Δх,
де Кр - коефіцієнт передачі (підсилення); Δх - величина непогодження.
Якщо взяти похідну із цього рівняння, то отримаємо:
![]()
Із
рівняння витікає, що процес регулювання
![]() починається, коли починає змінюватись
з якоюсь швидкістю сигнал непогодження
Δх, тобто коли
починається, коли починає змінюватись
з якоюсь швидкістю сигнал непогодження
Δх, тобто коли
![]() ,
і регулювання починається практично
із початком відхилення регульованої
змінної Хвих
від заданого значення. Регулювання
завершується, коли
,
і регулювання починається практично
із початком відхилення регульованої
змінної Хвих
від заданого значення. Регулювання
завершується, коли
![]() ,
а це можливе, коли перестане змінюватись
непогодження
,
а це можливе, коли перестане змінюватись
непогодження
![]() .
Але при цьому величина самого непогодження
Δх
може і не бути рівним нулю (
.
Але при цьому величина самого непогодження
Δх
може і не бути рівним нулю (![]() ).
).
Це зумовлює виникнення так званої статичної похибки в таких регуляторах, тобто, різниці між заданим значенням Хвих регульованої змінної та її значенням, яке залишається в кінці процесу регулювання.
У регуляторів пропорційної дії положення регулювального органу пропорційно відхиленню регульованої величини від заданого значення, тобто, існує жорстка залежність між змінною вхідної та вихідної величин регулятора. Задане значення регульованої змінної може бути забезпечене лише для одного значення навантаження. Величина статичної похибки залежить від коефіцієнта передачі Кр регулятора, чим він більший, тим менша похибка.
Значне збільшення Кр обмежується вимикачами стійкості системи регулювання. При великих значеннях Кр незначне непогодження Δх призводить до значних змін Up і процес буде наближатись до позиційного регулювання, а його характер – до автоколивального.
П-регулятори мають добрі динамічні характеристики (процес характеризується малим часом регулювання), але мають незадовільні статичні характеристики зв’язані з статичною похибкою. Використовуються у випадках, коли час регулювання має бути невеликим, але технологічний процес допускає наявність статичної похибки.
В П-регуляторах лінія зворотнього зв’язку (ЛЗЗ рис.4.1) являє собою підсилювач зі змінним коефіцієнтом підсилення, а сигнал ЛЗЗ є сигналом від’ємного зворотнього зв’язку за положенням регулювального органу. Такий зв’язок ще
називають жорстким зворотнім зв’язком.
До П-регуляторів відносяться регулятори прямої дії, наприклад, тиску (рис.4.2,б). Пружина виступає в ролі ЛЗЗ і пропорційно стискується, протидіючи прогину мембрани. Як тільки сила протидії стане рівна силі тиску, рух частин регулятора припиняється і настане новий стан рівноваги, при якому
новому значенню тиску відповідає нове пропорційне положення регулюючого
органу РО.
У динамічному відношенні П-регулятор є підсилюючою ланкою. За умов стрибкоподібної зміни вхідної величини регулятора Δх вихідна регулююча дія Up змінюється також стрибкоподібно (рис. 4.3):