

Розділ 4 автоматичні регулятори
4.1. Структурна схема автоматичного регулятора
Автоматичний регулятор (АР) - це керуючий пристрій, призначений для вироблення управляючого сигналу на об’єкт управління з метою підтримання технологічних параметрів на заданому рівні.
Регулятори розрізняють за багатьма ознаками і конструкцією, але
узагальнена функціональна схема має вид, приведений на рис.4.1.
На елемент порівняння (ЕП) надходять сигнали заданого Хзад та дійсного Хвих значень регульованої змінної, тобто, сигнал від задавача Хзад та вимірювального елемента (ВЕ), який відображає значення Хвих. Елемент порівняння визначає сигнал відхилення (непогодження) Δх=Хзад-Хвих, який подається на управляючий елемент (УЕ).
Управляючий елемент в свою чергу вміщує елемент порівняння, підсилювач сигналу ПС з великим коефіцієнтом підсилення, вузол управління ВУ, за допомогою якого формується управляючий сигнал Up згідно з законом регулювання, та ланцюг від’ємного зворотнього зв’язку ЛЗЗ.Ланцюг ЛЗЗ може бути підсилювачем або більш складним елементом.
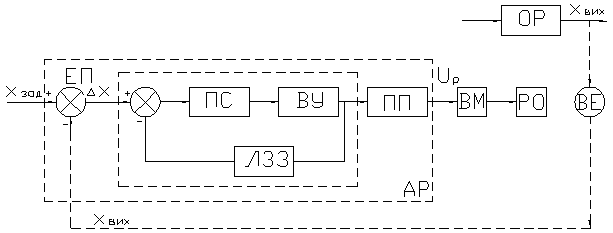
Рис. 4.1. Функціональна схема автоматичного регулятора
На виході автоматичного регулятора – знаходиться підсилювач потужності ПП, який підсилює сигнал управляючого елементу до потужності, достатньої для керуванням виконавчим механізмом. Останній безпосередньо переміщує регулюючий орган, що змінює надходження речовини чи енергії в об’єкт.
Найбільш важливою характеристикою регулятора є закон регулювання, котрий показує яким чином здійснюється регулююча дія Uр регулятора на об’єкт управління в залежності від відхилення регулюваної змінної від Хвих від заданого значення Хзад та в часі.
4.2. Класифікація регуляторів
1.За характером регулювальної дії автоматичні регулятори (АР) розділяють на регулятори безперервної (аналогової) та дискретної дій.
У аналогових АР - регулююча дія здійснюється безперервно за відповідної зміни відхилення регульованого параметра. Регулятори дискретної дії змінюють регулюючу дію тільки з досягненням регульованим параметром певних заданих значень.
В реалізації закону регулювання найважливішу роль відіграє лінія зворотного зв’язку ЛЗЗ. У найпростіших дискретних двопозиційних регуляторів вона відсутня. В цьому випадку поява незначного непогодження призводить, завдяки високому коефіцієнту підсилення ПС (рис. 4.1), практично миттєво до появи найбільш можливого за амплітудою сигналу Up на виході. Відповідно виконавчий механізм (ВМ) переміщує регулювальний орган (РО) в
одне із крайніх положень.
2.За способом дії АР поділяються на регулятори прямої та непрямої дії.
В регуляторах прямої дії для переміщення регулювального органу використовується безпосередньо енергія регульованої (змінної) величини. Вони застосовуються у випадках, коли регульована змінна має достатню енергію для переміщення регульованого органу РО ( в регуляторах рівня або тиску).
У регуляторі рівня (рис. 4.2,а) при зміні рівня рідини змінюється положення поплавка 1, який за рахунок штока 4 через важіль 2 впливає на ступінь відкриття регулюючого органу 3. Коли рівень, наприклад, зростає, клапан 3 прикривається і зменшує надходження рідини в збірник. Задане значення рівня в резервуарі залежить від довжини штока 2.

Рис. 4.2. Регулятори прямої дії а) – рівнята б) -тиску.
У регуляторах тиску (рис. 4.2,б) при зміні тиску змінюється положення мембрани 1, яка через шток 2 впливає на положення регулюючого органу 4. При зростанні тиску клапан прикривається. Завдання регулятору змінюється гайкою 3, переміщення якої змінює ступінь стиснення пружини 2. Такий регулятор ще називають регулятором «після-себе».
У регуляторах непрямої дії енергія до їх елементів, насамперед, до підсилювача потужності, подається від зовнішнього джерела живлення, що дозволяє розвивати великі динамічні зусилля при переміщенні регулюючих органів, та забезпечує можливість територіального розподілення автоматичного регулятора та виконавчого механізму 3 регулюючим органом.
Такі регулятори непрямої дії мають більш високу точність та швидкодію.