

Астатичні об’єкти регулювання та нестійкі
У астатичних об’єктів не існує однозначної залежності між регульованою змінною та вхідними діями на об’єкт, тобто, вони на мають статичної характеристики, в них не існує самовирівнювання. Прикладом астатичного об’єкта також може бути ємнісний напірний бак, на виході якого встановлений насос. В цьому об’єкті усталений режим можливий лише за рівноваги припливу рідини та продуктивності постійно ввімкнутого насосу

Рис. 3.8. Астатичний об’єкт регулювання.
. В іншому випадку зі зміною припливу G порушується матеріальний баланс, що приводить до зміни рівня Н з постійною швидкістю, тобто, об’єкт не має самовирівнювання, = 0.
Рівняння динаміки такого об’єкту має вигляд:
![]() Якщо
його про інтегрувати, то:
Якщо
його про інтегрувати, то:
![]() .
.
Крива розгону астатичного об’єкту (рис.3.9,а) - це пряма під кутом . Кут нахилу залежить від властивостей астатичного об’єкту та величини збурення:
![]() .
.
Існують також об’єкти, що звуться нестійкими і у яких будь-яке збурення викликає збільшення вихідної регульованої змінної вих ( вихідного сигналу ) зі зростаючою швидкістю.
Такі об’єкти мають негативне самовирівнювання ( 0 ). Зустрічаються
рідко, наприклад, апарати, в яких відбувається ланцюгові реакції або екзотермічні реакції, що протікають при постійній температурі. Експлуатувати такі об’єкти без регуляторів не можливо.

X
вих
Хвих


t
t


а) б)
Рис. 3.9. Крива розгону астатичного а) та нестійкого об’єктів регулювання.
Ємність та запізнення
Об’єкти регулювання мають властивість накопичувати енергію або речовину. Ця властивість називається ємністю об’єкту. Для теплового холодильного апарату ємністю буде його загальна теплоємність, ємність холодильної камери. Для гідравлічного об’єкту – об’єм резервуара. Ємність впливає на якість регулювання.
За дії однакового збурення регульований сигнал Хвих буде змінюватись з більшою швидкістю в тому об’єкті, ємність якого менше. Таким чином, ємність ОР пропорційна до сталої часу Т і теж характеризує інерційність об’єкта.
Запізнення Хвих обумовлене скінченним значенням швидкості руху матеріальних потоків і оцінюється відрізком часу між моментом подачі на вхід збурення до моменту фіксації зміни регульованої змінної.
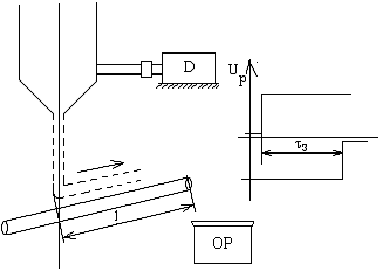
Рис.3.10. Варіант чистого (транспортного) запізнювання.
У більшості об’єктів між моментом виникнення збурення та початком
зміни регульованої змінної Хвих проходить деякий час – запізнювання, що ускладнює управління процесом. Розрізняють: чисте ( транспортне ) та ємнісне запізнювання в об’єктів регулювання.
Чисте – зумовлене тільки швидкістю руху матеріальної точки, тобто,
причина виникнення - це транспортування матеріалів, яке приводить до того, що між зміною вхідних та вихідних сигналів проходить певний час з.
Джерелом цього виду запізнення є транспортери, трубопроводи, конвеєри.
Наприклад, подання матеріалу транспортером (рис.3.10). Час запізнювання з визначається шляхом L руху транспортера до його швидкістю V ).
Ємнісне,
або перехідне запізнюв
Хвих




властиве для багато ємнісних об’єктів.
У цих об’єктах ємнісне запізнювання
виникає з подоланням потоку речовини
або енергії опору, що розділяють
теплові,
гідравлічні та інші
t
ємності об’єкту. В цьому випадку
з
T
є
змінна спершу
майже не змінюється,

Рис. 3.11. Ємнісне запізнювання.
а потім швидкість її зростає (рис. 3.11). Ємнісне запізнювання є – це час від початку зміни дії збурення до моменту зміни регульованої змінної з найбільшою швидкістю. Повне запізнювання об’єкта дорівнює сумі часів чистого та ємнісного запізнювань. [ 8, с 99…107; 7, с 42…57 ]
Контрольні запитання до розділу 3
1. Призначення параметричної схеми об’єкта управління (ОУ).
2. Охарактеризуйте основні режими роботи ОУ.
3. Що таке математична модель (ММ) ОУ?
4. Як отримують статичну ММ ОУ4?
5. Як отримують динамічну ММ ОУ?
6. Які знаєте динамічні характеристики ОУ?
7. Як лінеарізують нелінійну статичну характеристику ОУ?