

9. Система генератор – двигатель (гд).
Принципиальная схема системы Г-Д. В системе ГД в кач-ве управляемого преобр-ля используется генератор пост. тока независимого возб-ия, приводимый во вращение АД или СД. В кач-ве приводного дв-ля рабочей машины используется ДНВ.
П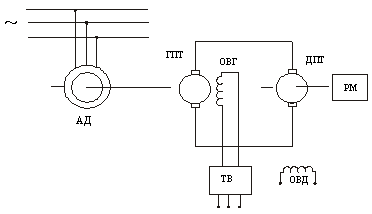 уск
осущ-тся включением сетевого (гонного)
Д, вращающего Г. Приводной Д перед этим
должен быть полностью возбужден, т.е.
его магн. поток должен быть номинальным.
Напряжение на ОВ ГПТ д/б =0. При подаче
напряжения на ОВ Г и его ↑, он будет
развивать ЭДС, появится напряжение на
якоре ДПТ и последний будет разгоняться.
уск
осущ-тся включением сетевого (гонного)
Д, вращающего Г. Приводной Д перед этим
должен быть полностью возбужден, т.е.
его магн. поток должен быть номинальным.
Напряжение на ОВ ГПТ д/б =0. При подаче
напряжения на ОВ Г и его ↑, он будет
развивать ЭДС, появится напряжение на
якоре ДПТ и последний будет разгоняться.
В случае гонного АД с увеличением нагрузки на валу приводного ДПТ возрастает тормозной момент ГПТ, что приводит к снижению ск-ти гонного АД, следовательно, снижению ск-ти ГПТ и его ЭДС, что сказывается и на ск-ти ДПТ. В мощных ЭПах по системе ГД это снижение составляет (1,5¸2)%.
«+» АД
- простота, надежность, малая колебательность.
«+» СД -меньшая критичность к колебаниям
 ,
возможность работать с опережающим
током. Обычно СД используется при
мощностях ген-ра в сотни и тысячи кВт.
,
возможность работать с опережающим
током. Обычно СД используется при
мощностях ген-ра в сотни и тысячи кВт.
Питание
ОВ ГПТ в современных системах ГД,
осуществляется от тиристорного или
транзисторного ТВ. Осн. видом ТВ является
ТП с раздельным упр-ем комплектами
в ентилей.
Зависимость вых. напряжения упр-ия UУ
на рис. Ее раб. участок можно считать
линейным. Динам. процессы ТВ описываются
ур-м
ентилей.
Зависимость вых. напряжения упр-ия UУ
на рис. Ее раб. участок можно считать
линейным. Динам. процессы ТВ описываются
ур-м

Пренебрегая
гистерезисом магнитной цепи Г и считая
его ненасыщенным, для линейного участка
зависимости EГ=f(UВГ),
можно написать:
 ,
,
где
 -при wГ=const;
-при wГ=const;

Уравнение мех. хар-ки дв-ля в системе ГД можно получить из ур-ия равновесия ЭДС в як. цепи.
 ,
,
Здесь

Выразив
ток iя через момент
двигателя получим:

Здесь b – модуль статической жесткости мех. хар-ки двигателя в системе ГД.
Ур-ие
мех. хар-ки дв-ля для статического режима
можно представить в виде:
 или
или
 или
или
 (ФНД – ном. поток Д).
(ФНД – ном. поток Д).
Семейство мех. хар-к Д в системе ГД, соответствующее различным значениям ЭДС генератора при СД, на рис.
Ж есткость
основной хар-ки дв-ля ~ в 2 раза меньше,
чем при питании его от сети с U=const,
вследствие того, что в як. цепи кроме
сопротивления якоря Д имеется еще и
сопротивление якоря ген-ра, а они ~
одинаковы. Но скорость идеального ХХ Д
в разомкнутой системе ГД больше, чем
при питании Д от сети с U=const,
т.к. номин. ЭДС генератора, определяющая
w0 Д, больше, чем
номин. напряжение Д, определяющее w0
при питании его от сети, т.е.
есткость
основной хар-ки дв-ля ~ в 2 раза меньше,
чем при питании его от сети с U=const,
вследствие того, что в як. цепи кроме
сопротивления якоря Д имеется еще и
сопротивление якоря ген-ра, а они ~
одинаковы. Но скорость идеального ХХ Д
в разомкнутой системе ГД больше, чем
при питании Д от сети с U=const,
т.к. номин. ЭДС генератора, определяющая
w0 Д, больше, чем
номин. напряжение Д, определяющее w0
при питании его от сети, т.е.
 ,
т.к.
,
т.к.
 .
.
Хар-ка двигателя при питании его от сети с U=UH изображена пунктиром.
Режимы работы, торможение, расчет характеристик, основные показатели. Изменяя поток возбуждения (его ЭДС) можно осущ-ть непрерывное плавное упр-ие моментом и скоростью ЭПа во всех 4-х квадрантах коорд. системы при b=const. На рис. показано в 1-м квадранте семейство хар-к при ЕГ=var.
Р ежимы.
Двигательный режим заштрих. обл-ть
в 1 и 3 квадрантах. Динам.торможение -
одна хар-ка, проход. через начало
координат. Режим противовключения
-область между осью моментов и
характеристикой динамического торможения
во 2 и 4 квадрантах.
ежимы.
Двигательный режим заштрих. обл-ть
в 1 и 3 квадрантах. Динам.торможение -
одна хар-ка, проход. через начало
координат. Режим противовключения
-область между осью моментов и
характеристикой динамического торможения
во 2 и 4 квадрантах.
Генераторный режим с рекуперацией энергии в сеть -область во 2 и 4 квадрантах, заключенная между осью скоростей и хар-кой динамического торможения.
Торможение
с отдачей энергии в сеть. ↓ или снимаем
возб-ие генератора, ЭДС дв-ля станет
больше ЭДС генератора. Д превратится в
генератор. Ток в якорной цепи
 изменит направление на противоположное.
Генератор превратится в Д, работающий
с ослабленным магнитным потоком. Скорость
его ↑ и он будет раскручивать гонный Д
со сверхсинхронной скоростью. Гонный
Д превращается в генератор. Он будет
отдавать в сеть акт. энергию, потребляя
из сети реакт. энергию.
изменит направление на противоположное.
Генератор превратится в Д, работающий
с ослабленным магнитным потоком. Скорость
его ↑ и он будет раскручивать гонный Д
со сверхсинхронной скоростью. Гонный
Д превращается в генератор. Он будет
отдавать в сеть акт. энергию, потребляя
из сети реакт. энергию.
Кинет.энергия вращающихся инерционных масс приводным дв-лем преобразуется в электрическую, поскольку он теперь работает генератором. В сеть отдается эта энергия за исключением потерь, имеющих место во всех элементах ЭПа.
Структурная схема
Достоинства и недостатки.
Д остоинства
системы ГД:
остоинства
системы ГД:
1.Отсутствуют громоздкие пусковые реостаты и потери в них.
2Упр-ие процессами перенесено в цепи возбуждения, имеющие небольшие токи, что облегчает и удешевляет аппаратуру.
3.Сравнительно высокий диапазон регулирования.
Недостатки системы ГД:
1.Высокая установленная мощность, превышающая в 3 раза мощность приводного дв-ля.
2.Сравнительно
низкий КПД, равный
 .
.
3.Повышенная крутизна механических характеристик.
4.Высокая первоначальная стоимость машинного оборудования.