

6. Способы регулирования активной и реактивной мощности синхронной машины
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
В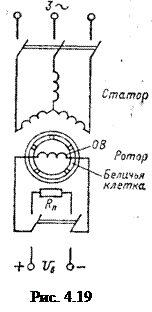 начале
обмотка возбуждения синхронного
двигателя замыкается на пусковой реостат
Rп, сопротивление которого в 8 – 10 раз
больше, чем сопротивление обмотки
возбуждения (если оставить обмотку
возбуждения разомкнутой, то в ней при
пуске вращающимся полем статора будет
наводиться значительная ЭДС, опасная
для изоляции). При включении обмотки
статора на трёхфазное напряжение
двигатель за счёт короткозамкнутой
обмотки начинает работать как асинхронный.
Когда частота вращения ротора двигателя
достигает примерно 95% синхронной частоты
вращения поля статора n0, пусковой реостат
Rп отключают, а обмотку возбуждения
ротора включают на постоянное напряжение
Uв. Так как теперь частота вращения поля
статора отличается незначительно от
частоты поля вращающегося ротора, полюсы
полей статора и ротора вступают во
взаимодействие, двигатель втягивается
в синхронизм и начинает работать как
синхронный. В рабочем, т.е. в синхронном,
режиме токи в пусковой короткозамкнутой
обмотке не возникают и она в работе
машины не участвует. Однако при
кратковременных толчках механической
нагрузки на валу в пусковой обмотке
токи наводятся и создают момент,
демпфирующий колебания ротора.
начале
обмотка возбуждения синхронного
двигателя замыкается на пусковой реостат
Rп, сопротивление которого в 8 – 10 раз
больше, чем сопротивление обмотки
возбуждения (если оставить обмотку
возбуждения разомкнутой, то в ней при
пуске вращающимся полем статора будет
наводиться значительная ЭДС, опасная
для изоляции). При включении обмотки
статора на трёхфазное напряжение
двигатель за счёт короткозамкнутой
обмотки начинает работать как асинхронный.
Когда частота вращения ротора двигателя
достигает примерно 95% синхронной частоты
вращения поля статора n0, пусковой реостат
Rп отключают, а обмотку возбуждения
ротора включают на постоянное напряжение
Uв. Так как теперь частота вращения поля
статора отличается незначительно от
частоты поля вращающегося ротора, полюсы
полей статора и ротора вступают во
взаимодействие, двигатель втягивается
в синхронизм и начинает работать как
синхронный. В рабочем, т.е. в синхронном,
режиме токи в пусковой короткозамкнутой
обмотке не возникают и она в работе
машины не участвует. Однако при
кратковременных толчках механической
нагрузки на валу в пусковой обмотке
токи наводятся и создают момент,
демпфирующий колебания ротора.
Способы регулирования. Изменение активной и реактивной мощностей синхронного генератора, работающего параллельно с сетью большой мощности, осуществляется путем изменения внешнего момента и тока возбуждения. Чтобы обеспечить требуемый режим работы генератора, обычно одновременно регулируют и ток возбуждения, и вращающий момент.
Рассмотрим два предельных случая регулирования: а) момента при неизменном токе возбуждения; б) тока возбуждения при неизменном внешнем моменте.
Работа генератора с неизменным током возбуждения. Для генератора с неявно выраженными полюсами векторную диаграмму (рис. 6.35, а)строят по уравнению Ú = É0- jÍа Xсн . Вектор напряжения сети Úc по контуру обмотки генератора имеет направление, встречное вектору напряжения генератора, т. е. Ú = - Úc .
Если генератор работает с cos φ = 1, то вектор тока якоря Íа1 совпадает по направлению с вектором напряжения Ú, а вектор ЭДС É01опережает эти векторы на угол θ1 . При изменении нагрузки, например при ее возрастании, следует увеличить момент, приложенный к валу генератора. При этом угол в должен увеличиться до какого-то значения θ2 в соответствии с возрастанием мощности со значения P1 до Р2.
Принимая полезную мощность (отдаваемую в сеть), равной электромагнитной
Р = т (Е0/Хсн ) U sin θ, для соотношения мощностей Р1 и Р2 имеем Р1/Р2 = sinθ1/sinθ2. Таким образом, при увеличении мощности с Р1 до Р2 вектор ЭДС É0 поворачивается в сторону опережения и образует с вектором Ú угол θ2. Конец вектора É0 скользит по окружности радиусом, равным Е0, так как ток возбуждения остается неизменным.
Соединив конец вектора Ú с концом вектора É02 , получим вектор jÍа2 Xсн . Вектор тока Íа2 перпендикулярен падению напряжения jÍа2Xсн , а его модуль определится из соотношения
Ia2/Ia1 = |Íа2Xсн|/|jÍа1Xсн|.
При уменьшении мощности с Р1 до Р3 следует уменьшить момент, приложенный к валу генератора. При этом новый угол θ3 меньше угла θ1. Построение всех векторов (рис. 6.35, а) на диаграмме и в этом случае аналогично описанному в предшествующем примере.

Рис. 6.35. Векторные диаграммы синхронного генератора при различных режимах нагрузки
Приведенные диаграммы показывают, что при изменении внешнего момента, приложенного к валу синхронного генератора, работающего параллельно с сетью, изменяется не только активная, но и реактивная мощность. Следовательно, для того чтобы обеспечить наиболее благоприятный или требуемый режим работы генератора, при изменении активной мощности необходимо регулировать и ток возбуждения.
Работа генератора с неизменным моментом. Неизменность внешнего момента на валу генератора эквивалентна неизменности его мощности Р = mUIa cos φ. При работе на сеть большой мощности U = Uс = const, следовательно, при изменении тока возбуждения остается постоянной активная составляющая тока якоря Ia cos φ = const. На векторной диаграмме (рис. 6.35, б) это условие выражается в том, что конец вектора Íа скользит по прямой АВ, перпендикулярной вектору напряжения Ú. Однако при неизменной мощности (для машины с неявновыраженными полюсами) справедливо условие
Рис. 6.36. U-образные характеристики синхронного генератора
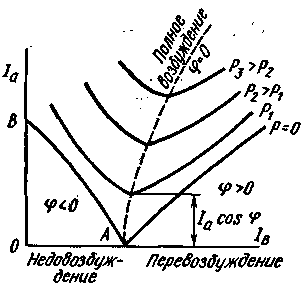
Р = (mЕ0U/Xсн )sinθ = const. При изменении тока возбуждения остаются неизменными все величины, кроме Е0 и sin θ; следовательно, условие неизменной мощности приводит к условию Е0 sin θ = const. На диаграмме это условие выражается в том, что конец вектора É0 скользит по прямой CD, параллельной вектору напряжения Ú. Чем меньше ток возбуждения, тем меньше по модулю вектор É0, но больше угол θ. Вектор тока Iа перпендикулярен вектору падения напряжения jÍа Xсн , поэтому его можно легко построить для каждого угла θ. На рис. 6.35,б показаны положения векторов É0, Íа и jÍа Xсн для трех значений тока Iв (эти векторы имеют индексы 1,2 и 3). Минимальному значению тока Iа соответствует режим работы при cos φ = 1. Чему соответствует определенный ток возбуждения. При увеличении тока возбуждения свыше этого значения или его уменьшения ток Iа возрастает. Зависимость тока якоря от тока возбуждения, называемая U-образной характеристикой, представлена на рис. 6.36. Для каждой мощности имеется вполне определенный ток возбужде-ния, которому соответствует минимум тока якоря. Чем больше мощность, тем больше ток возбуждения, соответствующий минимальному току якоря. Штриховая кривая, проведенная через точки минимумов, соответствует режимам работы генератора с cos φ = 1.
Режим недо и перевозбуждения
Синхронные двигатели являются элементом силового электропривода, синхронные компенсаторы служат для компенсации (выработки и потребления) реактивной мощности.
Характерными
режимами их работы в нормальном рабочем
состоянии являются: режим недовозбуждения
и режим перевозбуждения. Недовозбужденный
двигатель потребляет реактивную
мощность; его синхронная
![]() , равно как и сверхпереходная
, равно как и сверхпереходная
![]() , ЭДС меньше подведенного напряжения
. Перевозбужденный синхронный двигатель
(компенсатор) является источником
реактивной мощности, что соответствует
неравенству
, ЭДС меньше подведенного напряжения
. Перевозбужденный синхронный двигатель
(компенсатор) является источником
реактивной мощности, что соответствует
неравенству
![]() и
и
![]() . Векторные диаграммы для этих режимов
при условии , что позволяет отказаться
от разложения параметров по осям d
и q , приведены на рис.
4.18. При построении токи приняты со знаком
« - », что соответствует двигательному
режиму.
. Векторные диаграммы для этих режимов
при условии , что позволяет отказаться
от разложения параметров по осям d
и q , приведены на рис.
4.18. При построении токи приняты со знаком
« - », что соответствует двигательному
режиму.
Начальные значения сверхпереходных ЭДС+ определяются по параметрам режима, предшествующего короткому замыканию, и в соответствии с векторными диаграммами вычисляются по формуле:
![]()
где
![]() ,
,
![]() ,
,
![]() – параметры режима, предшествующего
КЗ;
– параметры режима, предшествующего
КЗ;
знак « -» соответствует режиму перевозбуждения;
знак « +» – режиму недовозбуждения.

Рис. 4.18. Векторные диаграммы синхронного двигателя
В соответствии с
функциональным назначением синхронного
компенсатора он потребляет незначительный
активный ток; реактивный ток (![]() ) является превалирующим и угол
близок к
) является превалирующим и угол
близок к
![]() .
.