

4. Моменты асинхронного двигателя.
Чем
создается электромагнитный (вращающий)
момент асинхронного двигателя? Запишите
выражение зависимости
 и поясните физическую сущность. Запишите
выражение зависимости
при
и поясните физическую сущность. Запишите
выражение зависимости
при
 (акт. R вторичн. обмотки +
R реостата). Запишите
выражение расчетной формулы момента и
поясните физическую сущность.
(акт. R вторичн. обмотки +
R реостата). Запишите
выражение расчетной формулы момента и
поясните физическую сущность.
М - электромагнитный момент, создаваемый в резе взаимодействия вращающего магнитного поля с током в роторе. Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0.
П ояснение
зависимости M = f(S):
ояснение
зависимости M = f(S):
1.Область от S = 0 Sкр
При
малом скольжении X2S=Х2S
0, тогда ток в роторе
 активному току, с увеличением МВ
S Ф=const
активному току, с увеличением МВ
S Ф=const

 M
M
В
области Mmax начинает проявляться
индуктивное сопротивление X2S. При
Mmax самая большая
 .
.
2.Область скольжений S = Sкр 1
S
 X2S
X2S
 (угол
сдвига)
(угол
сдвига)
 M
M
3.Ток, при S = 1 равен пусковому, который в 57 раз больше номинального. И момент равен начальному пусковому моменту.
4.При S = 0 ток I1 0, т.к. при S = 0 двигателем потребляется реакт. мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S
= 0 ток ротора
 ,
т.к.
,
т.к.

Кривая зависимости M = f(S) характеризуется тремя моментами: 1) пусковой момент Мп при S = 1; 2) максимальный момент Мmax Sкр; 3) номинальный момент МН SН.
Отношение
макс. (критического) момента к номинальному,
называется перегрузочной способностью.
 Максимальный (критический)
момент АМ
Максимальный (критический)
момент АМ
 соотв. макс. моменту.
соотв. макс. моменту.


Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%.
Знак ‘+’ соотв-т двигат. режиму, ‘-‘ генерат. режиму.
При
генераторном режиме
 .
.
Из
выражения Мкр опр-тся квадратом
напряж., не зависит от акт. сопр. роторной
цепи, но влияет на его расположение.
Если сопротивление рот. цепи ,
то Sкри кривая
момента смещается вправо
 ,
,

Чем больше акт. сопр. в роторной цепи, тем больше пуск. момент и меньше пуск. ток. Это ценное свойство используется в двигателях с фазным ротором.
Расчетная
формула момента:
 ,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.
,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.
5. Поясните устройство и принцип действия генератора и дв-ля постоянного тока. Назначение и устройство коллектора в машинах постоянного тока (покажите принцип выпрямления эдс).
Устройство и принцип действия машин постоянного тока
Э ДС,
наводимая в проводнике, получается за
счет того, что проводник пересекает
магнитное поле со скоростью
ДС,
наводимая в проводнике, получается за
счет того, что проводник пересекает
магнитное поле со скоростью
 .
.
1.Неподвижная часть – индуктор создает магн.поток. К станине (1) крепятся шматованные полюса (2) на которых располагается обмотка возбуждения (3) (рис. 1).
ОВ создает магн. поток при протекании по ней постоянного тока.
 2.Якорь
(индуцируется ЭДС). Якорь вращается.
Представляет собой цилиндр, набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).
2.Якорь
(индуцируется ЭДС). Якорь вращается.
Представляет собой цилиндр, набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).
К служит для выпрямления переем. ЭДС в
постоянную величину (режим генератора).
Эта ЭДС снимается с помощью щеток (7),
рис. 2. Рассмотрим принцип
выпрямления:
(рис.4). Виток подсоединен к двум кольцам
и вращается в магнитном поле. При вращении
витка в проводниках (1,2) будет наводиться
переменная ЭДС (под северным полюсом
одно направление, а под южным другое).
Снятое со щеток напряжение будет иметь
sin
хар-р.
служит для выпрямления переем. ЭДС в
постоянную величину (режим генератора).
Эта ЭДС снимается с помощью щеток (7),
рис. 2. Рассмотрим принцип
выпрямления:
(рис.4). Виток подсоединен к двум кольцам
и вращается в магнитном поле. При вращении
витка в проводниках (1,2) будет наводиться
переменная ЭДС (под северным полюсом
одно направление, а под южным другое).
Снятое со щеток напряжение будет иметь
sin
хар-р.
К состоит из двух изолир-х между собой
медных пластин, выполненных в форме
полуколец, к которым присоединены концы
витка обмотки якоря. Пластины коллектора
соприкасаются с неподвижными контактными
щетками, которые связаны с внешней
электрической цепью. При работе К
вращается вместе с витками обмотки
якоря. Щетки устан-тся таким образом,
что в то время, когда ЭДС витка меняет
свой знак на обратный, коллект. пластина
перемещается от одной полярности к
другой, приходя в соприкосновение со
щеткой другой полярности. В результате
этого на щетках возникает пульсирующее
напряжение, постоянное по направлению.
Для внешней цепи «+» будет на нижней
щетке, а «-» на верхней. При одном витке
выпрямленная ЭДС будет иметь большую
пульсацию.
состоит из двух изолир-х между собой
медных пластин, выполненных в форме
полуколец, к которым присоединены концы
витка обмотки якоря. Пластины коллектора
соприкасаются с неподвижными контактными
щетками, которые связаны с внешней
электрической цепью. При работе К
вращается вместе с витками обмотки
якоря. Щетки устан-тся таким образом,
что в то время, когда ЭДС витка меняет
свой знак на обратный, коллект. пластина
перемещается от одной полярности к
другой, приходя в соприкосновение со
щеткой другой полярности. В результате
этого на щетках возникает пульсирующее
напряжение, постоянное по направлению.
Для внешней цепи «+» будет на нижней
щетке, а «-» на верхней. При одном витке
выпрямленная ЭДС будет иметь большую
пульсацию.
При
одном витке

 с ↑числа коллект-х пластин на полюс
пульсация ЭДС↓: если
с ↑числа коллект-х пластин на полюс
пульсация ЭДС↓: если
 ,
то
.
При
,
то
.
При
 ,
,
 ,
то
,
то

 ,
то
,
то
 .
.
4-6-4. Регулирование частоты вращения двигателей постоянного тока
Можно регулировать скорость
за счет изменения сопротивления в цепи
якоря, потока и подводимого напряжения.
Это видно из формулы:

4-6-5. Регулирование частоты вращения сопротивлением в цепи якоря.
Уравнения токов до и после введения сопротивления

 ,
,
 ,
откуда
,
откуда
 ,
т. е. ток
,
т. е. ток
 и момент уменьшается (
и момент уменьшается ( )
.
)
.
При этом
 и
скорость
и
скорость
 уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
Переходный процесс показан на рис. 230.
Р егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
Но так как ток якоря протекает
по Rр,
то увеличиваются общие потери, и снижается
кпд. При постоянном токе, за счет
увеличения падения напряжения
 ,
скорость двигателя уменьшается.
,
скорость двигателя уменьшается.
4-6-5-2. Регулирование частоты вращения за счет изменения потока.
Т ок
якоря до и после изменения потока
ок
якоря до и после изменения потока
 ,
,
 ,
их отношение
,
их отношение
 .
Уравнение моментов
.
Уменьшим поток на
.
Уравнение моментов
.
Уменьшим поток на
 ,
т. е.
,
т. е.
 ,
,
 .
Напряжение примем за единицу, тогда
.
Напряжение примем за единицу, тогда
 .
.
Ток якоря возрос в 3,3 раза,
тогда
 ,
то
,
то
 и
и
 (возрастает).
Переходный процесс представлен на рис.
232.
(возрастает).
Переходный процесс представлен на рис.
232.
С
увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного ,
т. к. уменьшен поток.
,
т. к. уменьшен поток.

При уменьшении потока частота вращения возрастает, рис 233.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирования малоэффективно из-за насыщения магнитной цепи.
4-6-5-3. Регулирование частоты вращения изменением подводимого напряжения.
Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.234.


Увеличивая ток возбуждения генератора iвг, возрастает поток Фг и Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии, рис. 234.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
П оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.
оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.
![]()
Увеличивая
угол управления
 - площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
- площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
И
дея регулирования напряжения подводимого к двигателю заключается в том, что, изменяя длит
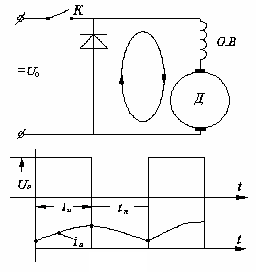 ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
Изменяя
время импульса tи
изменяется скважность
 ,
,
где tи - время импульса;
tп - время паузы.
С
Рис. 236
реднее значение Uср=U0.
 .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактарно-резисторных систем.