

Швидкості та прискорення точок тіла, що обертається
Як було відзначено раніше, прямі, проведені в тілі паралельно осі обертання (наприклад, пряма mm' на рис. 2.2), здійснюють поступальний рух, тобто, швидкості та прискорення усіх точок кожної такої прямої будуть однакові. Отже, для вивчення кінематичних характеристик точок тіла досить визначити відповідні величини для точок перетину, проведеного перпендикулярно осі обертання.
Траєкторіями усіх точок, що не лежать на осі обертання, є кола, площини яких перпендикулярні осі обертання, а центри лежать на цій осі.
Розглянемо
яку-небудь точку
М
тіла,
що знаходиться
на відстані h
від
осі обертання (рис. 2.2). Якщо за час dt
відбувається
елементарне обертання тіла на кут
d,
то
точка
М
при
цьому здійснює
по своїй траєкторії елементарне
переміщення
![]() .
Тоді
числове
(алгебраїчне)
значення швидкості точки
відповідно
до
формули (1.19) буде
.
Тоді
числове
(алгебраїчне)
значення швидкості точки
відповідно
до
формули (1.19) буде
![]() або
або
![]() . (2.10)
. (2.10)
Таким чином, алгебраїчне значення величини швидкості точки твердого тіла, що обертається навколо нерухомої осі, дорівнює добутку кутової швидкості тіла на відстань від цієї точки до осі обертання. Вектор швидкості спрямований по дотичній до описуваного точкою кола (або перпендикулярно площині П, що проходить через вісь обертання і точку М, або перпендикулярно прямої МР, що з'єднує точку М з віссю обертання) по напряму руху, що збігається з напрямом дугової стрілки кутової швидкості (рис. 2.2).
Вектори швидкостей усіх точок перерізу, перпендикулярного осі обертання, будуть розташовуватися в його площині, утворюючи поле швидкостей, вид якого зображений на рис. 2.4.
Відзначимо, що:
1) вектори швидкостей точок перпендикулярні прямим, що з'єднують точки з віссю обертання, і спрямовані у бік обертання тіла (дугової стрілки );
2) модулі швидкостей точок тіла, що обертається, пропорційні їх відстаням від осі обертання.
Швидкість точки тіла, що обертається, іноді називають лінійною або коловою на відміну від кутової швидкості тіла.
Для
знаходження прискорення точки
М
скористаємося
формулами
![]() .
Підставляючи
до них значення V
з
рівності (2.10) і з
урахуванням того,
що в нашому випадку
.
Підставляючи
до них значення V
з
рівності (2.10) і з
урахуванням того,
що в нашому випадку
![]() ,
одержимо:
,
одержимо:
![]() або
остаточно:
або
остаточно:
![]() . (2.11)
. (2.11)
Дотична складова прискорення спрямована по дотичній до траєкторії точки у бік дугової стрілки кутового прискорення , нормальна складова спрямована по радіусу МР до осі обертання (рис. 2.5).
Повне прискорення точки М буде
![]() ,
,
![]() або
або
![]() . (2.12)
. (2.12)
Відхилення
вектора
від радіуса описуваного точкою
кола (від нормалі до траєкторії)
визначається
кутом
![]() ,
що
обчислюється за формулою (1.25)
і, використовувавши рівняння (2.11),
одержимо
,
що
обчислюється за формулою (1.25)
і, використовувавши рівняння (2.11),
одержимо
![]() . (2.13)
. (2.13)
Рис. 2.4 |
Рис. 2.5 |
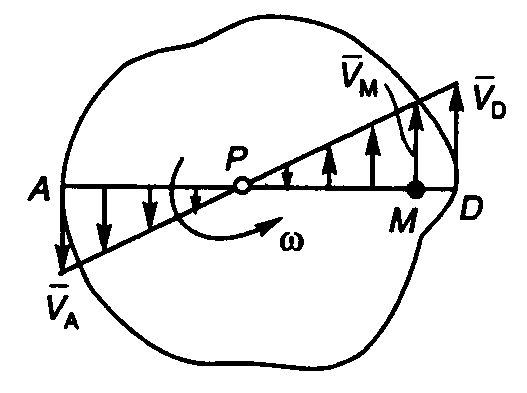
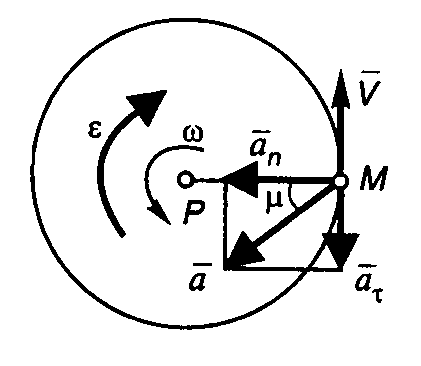
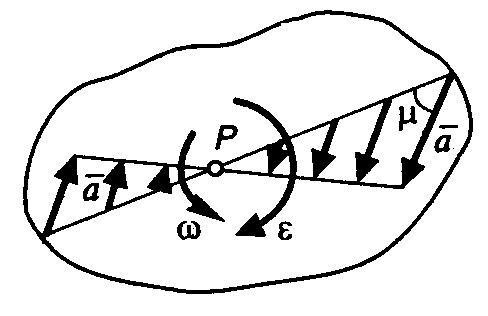
Рис. 2.6
Зазначимо, що при обчисленні кінематичних характеристик різних точок тіла, що обертається, в формули (2.12), (2.13) для даного моменту часу будуть підставлятися тіж самі значення величин і , оскільки вони є характеристиками руху всього тіла. Звідси випливає, що в даний момент часу кут для векторів прискорень усіх точок однаковий, а модулі прискорень точок пропорційні їх відстаням від осі обертання.
Поле прискорень точок тіла показано на рис. 2.6.
Приведемо також векторні вирази швидкості та прискорення точки тіла, що обертається.
Нехай
тіло здійснює
обертальний рух
і в даний момент часу відомі характеристики
його руху
і
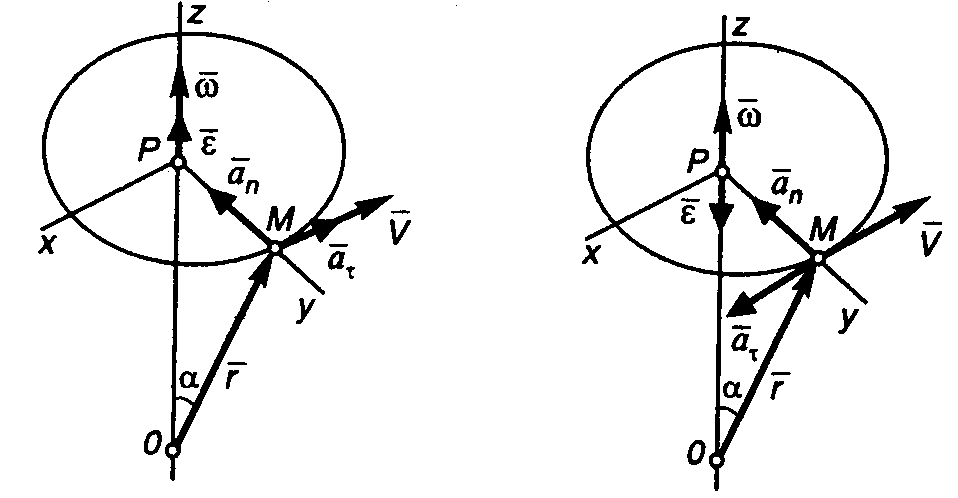
(рис. 2.7). З довільної точки
О
осі
обертання проведемо радіус-вектор
точки
М
(причому
![]() і
і
![]() ).
).
З побудови на рис. 2,7,а випливає, що вектор швидкості будь-якої точки тіла, що обертається, дорівнює векторному добутку вектора кутової швидкості тіла на радіус-вектор цієї точки (формула Ейлера):
![]() . (2.14)
. (2.14)
Модуль
цього вектора
![]() збігається з
раніше отриманим за формулою (2.10).
збігається з
раніше отриманим за формулою (2.10).
М





![]()
![]()



а) б)
Рис. 2.7
Вектор прискорення точки М визначимо як похідну вектора швидкості за часом:
![]()
або
![]() . (2.15)
. (2.15)
Формулу
(2.15) називають формулою Ривальса,
з якої випливає,
що вектор прискорення точки
дорівнює
векторній сумі двох векторів. Перший
доданок
![]() називають
обертальною
складовою
прискорення. При обертанні тіла навколо
нерухомої осі вектор
спрямований
по дотичній до траєкторії точки
М,
тому
його
позначимо
,
а
його модуль буде
називають
обертальною
складовою
прискорення. При обертанні тіла навколо
нерухомої осі вектор
спрямований
по дотичній до траєкторії точки
М,
тому
його
позначимо
,
а
його модуль буде
![]() .
Другий доданок у формулі (2.15) називають
доосьовою
складовою
прискорення. При обертанні тіла навколо
нерухомої осі вектор добутку
.
Другий доданок у формулі (2.15) називають
доосьовою
складовою
прискорення. При обертанні тіла навколо
нерухомої осі вектор добутку
![]() спрямований
уздовж МР,
тобто
по головній нормалі до траєкторії точки
М
(позначимо
його
в цьому випадку
),
а його модуль буде
спрямований
уздовж МР,
тобто
по головній нормалі до траєкторії точки
М
(позначимо
його
в цьому випадку
),
а його модуль буде
![]() .
.
З урахуванням формул (2.11), (2.15) робимо висновок, що
![]() . (2.16)
. (2.16)
Формули (2.16) є векторними виразами дотичного, нормального і повного прискорень точок твердого тіла, що обертається навколо нерухомої осі. Розташування цих векторів показано на рис. 2.7,а – при прискореному обертанні, рис. 2.7,б – при уповільненому обертанні).