

Все варианты ргр 2008 года / КП_Тема1 / Лист1_05
.docКурсовой проект
Тема 1. Моделирование плоского манипулятора
МИЭМ Кафедра ТСЭ
Графическая часть работы выполняется на листе чертежной бумаги формата А2, расчеты – на листах А4.
Схема № 5 Исходные данные. 21 = +90. tm = 5 с.
-
№
L0=OA
L1=AB
L2=ED
L3=DC
10
32
 вар.
вар.мм
мм
мм
мм
град.
град.
1
60
40
40
20
30 … 120
30 … 60
2
50
20
50
30
0 … 180
20 … 60
3
40
30
40
40
0 … 150
0 … 90
4
50
60
70
30
20 … 160
0 … 100
5
0
100
80
50
10 …110
30 … 30
6
20
100
60
40
20 … 90
20 … 90
7
30
50
50
50
0 … 120
0 … 90
8
40
50
60
50
30 … 130
30 …60
9
50
50
100
50
20 … 120
0 …90
10
30
100
100
50
0 … 160
0 … 80
S21 = (0,1…0,9)L2
Время изменения координат от мин. до макс. равно tm.
Требуется:
1. Для данного набора звеньев с элементами кинематических пар
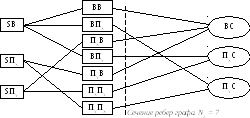
SB, SПX, SПY; BB, BПX, ПXB, BПY, ПYB, ПXПY, ПYПX; BC, ПXC, ПYC
построить граф связей моделей манипуляторов с тремя степенями свободы (W = 3).
Привести структурные формулы и схемы двух манипуляторов. Рассчитать их маневренность.
2. Построить заданную структурную схему механизма, привести таблицу исходных данных. На структурной схеме показать глобальную и локальные системы координат, а также все обобщенные координаты механизма.
3. Разработать компьютерную программу моделирования рабочей зоны, привести её текст, выполняемый модуль и твёрдую копию (в формате А4) результатов работы.
4. Построить графически рабочую зону манипулятора. При этом необходимо принять одинаковые масштабы по осям X и Y. Сравнить с компьютерными результатами.
5. Для средних значений обобщенных координат построить кинематическую схему манипулятора (план механизма) и рассчитать матричным методом координаты центра схвата С. Определить величину его радиус-вектора RC, сравнить с измеренным RCГ на чертеже. Оценить погрешность.
6. Определить угловые скорости звеньев, методом планов найти вектор скорости точки С.
Пример графа связей манипуляторов с подвижностью W = 2.
№№ звеньев: 1 2 3
Группа Студент __________________ Дата выдачи __________ Преподаватель____________