

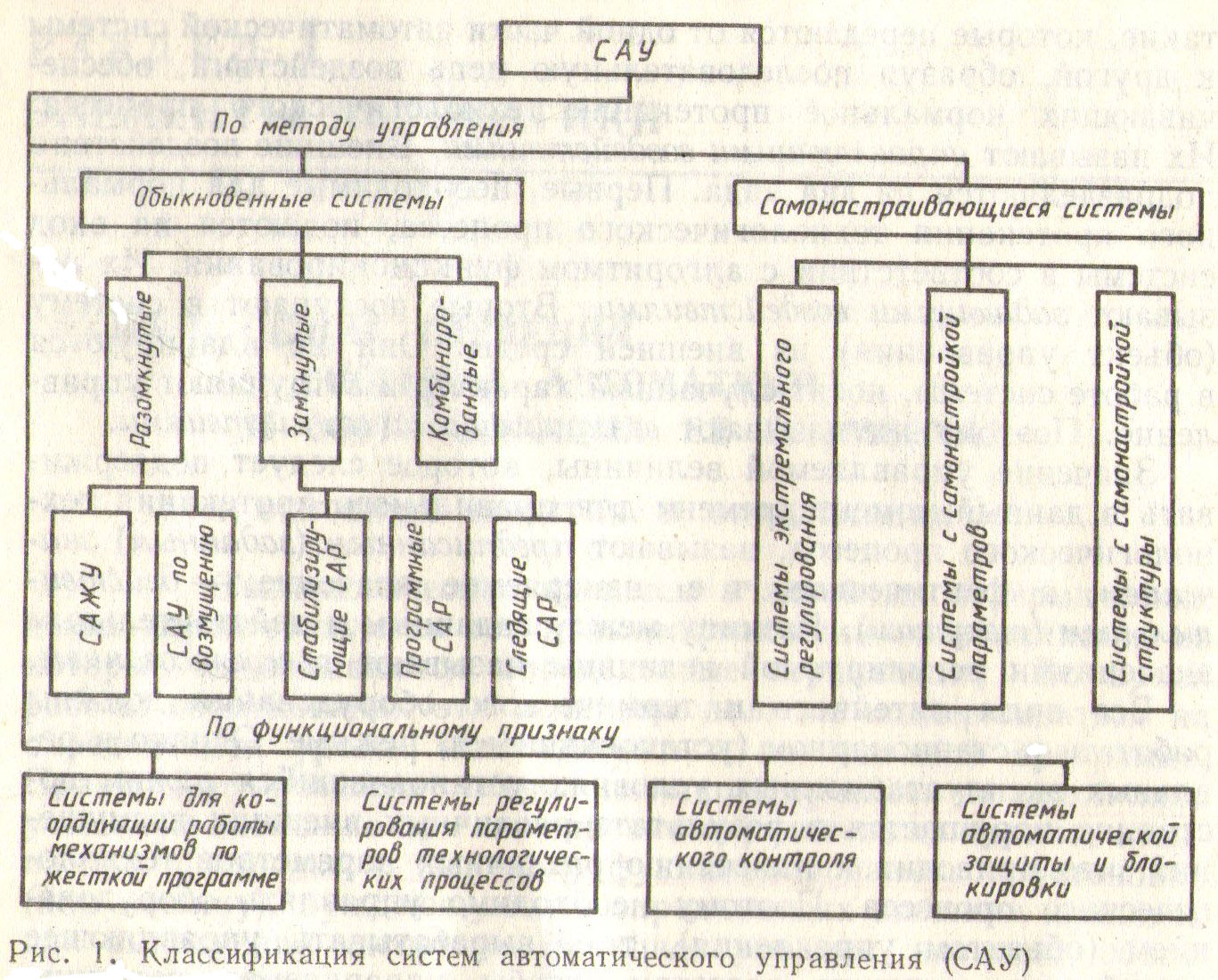
1.1.2. Классификация систем автоматического управления
 Классифицировать
системы автоматического управления
можно по методу управления и функциональному
признаку (рис. 1.).
Классифицировать
системы автоматического управления
можно по методу управления и функциональному
признаку (рис. 1.).
Поддержание управляемой величины в определенных пределах или изменение ее по заданному закону в процессе работы системы может быть выполнено как по разомкнутому, так и по замкнутому циклам управления.
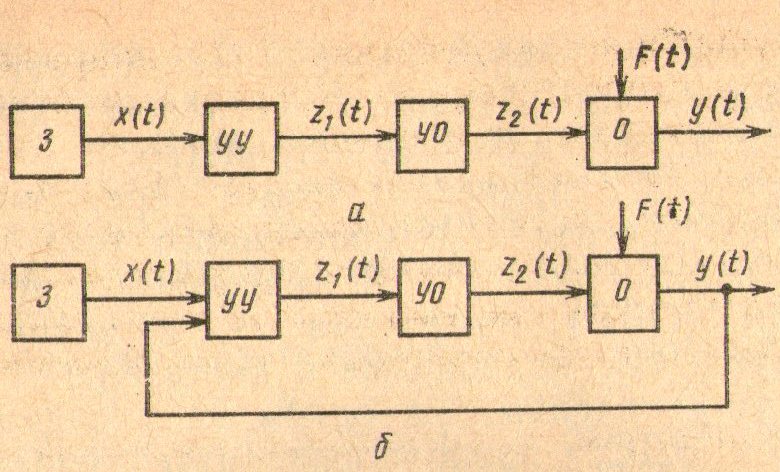
Рис. 2
Рассмотрим эти понятия на примере системы, изображенной на рисунке 2, которая состоит из последовательно соединенных управляемого объекта О, управляющего органа УО, управляющего устройства УУ и задатчика 3— устройства, направляющего в систему задающее воздействие.
При управлении по разомкнутому циклу (рис. 2 , а) воздействие x(t), поступающее на управляющее устройство от задатчика задается оператором.
По существу разомкнутая система представляет собой передаточную цепь, в которой задающее воздействие x(t) после определенной обработки управляющим устройством преобразуется во внутренние воздействия Z1(t) и Z2(t) и передается управляемому объекту, но при этом обратного воздействия управляемого объекта на управляющее устройство нет.
По замкнутому циклу система будет работать (рис. 1 ,б), если соединить ее выход с управляющим устройством так, чтобы на него все время поступало два воздействия — с задатчика и с выхода управляемого объекта.
Таким образом, в данной системе существует воздействие не только управляющего устройства на объект, но и объекта на управляющее устройство.
Автоматичечкие системы управления можно классифицировать: по назначению, по характеру управляемых величин, по виду используемой для управления энергии, по функциональному назначению, по методу управления.
Системы стабилизации поддерживают требуемое значение управляемой величины с заданной точностью. Поскольку требуемое значение управляемой величины в системе стабилизации постоянно, то расхождение между ним и текущим значением в установившемся режиме (ошибка управления) не должно превышать допустимого значения.
Любая система управления характеризуется регулировочными характеристиками. Различают системы стабилизации статического и астатического регулирования.
Когда установившееся после окончания переходного процесса значение управляемой величины при различных постоянных значениях нагрузки будет принимать различные постоянные значения, называется статическим регулированием.
Устройства, осуществляющие данный вид управления, называются статическими регуляторами. Статические регуляторы поддерживают не строго постоянное значение управляемой величины, а с некоторыми отклонениями от заданного, то есть с ошибкой., которая называется статической ошибкой. Под статической ошибкой ∆у понимают наибольшее отклонение управляемой величины при изменении нагрузки от нуля до номинальной.
Перемещению рабочих органов регулятора противодействуют силы трения, для преодолевания которых требуется некоторе номинальное значение воздействия. Если это воздействие меньше указанного минимального значения, подвижная система регулятора не может прийти в движение, так как противодействие сил трения больше движущей силы, вызванной возмущением. Таким образом, появляется некоторая зона отклонения управляемой величины от заданного значения, называемой зоной нечуствительности , в пределах которй регулятор не воздействует на процесс.
С учётом нечуствительности регулировочная характеристика статического регулирования выразится уравнением
y = y0+∆y ± H,
где y0 – заданное(предписанное) значение управляемой величины; ∆y - статическая ошибка; Н – нечуствительность регулятора.
Следовательно под астатическим регулированием понимают такое, когда в установившемся режиме при различных значения постоянной нагрузки поддерживается постоянное значение управляемой величины, равное заданному.
Регулировочная характеристика для астатического регулирования без учёта нечуствительности регулятора выражается уравнением
y = y0 = const.
При наличии нечуствительности, а она практически существует во всех регуляторах, уравнение примет вид
y = y0 ± H
Устройства, осуществляющие данный вид регулирования, называются астатическими регуляторами. Такие регуляторы более точно поддерживают заданное значение управляемой величины, но, как правило, сложнее по устройства, чем статические, склонны к колебаниям в переходных режимах и в большинстве случаев не обладают требуемой устойчивостью без вспомогательных устройств.
Програмные системы предзначаются для изменения управляемой величины по определённому предписанию – программе, которая составляется заранее на основании требований технологического процесса. Эти требования выражаются изменениями задающего воздействия по определённому закону в виде заранее известной функции времени.
Согласно классификации по функциональному признаку все автоматические системы управления подразделяют на четыре класса.
Системы, предназначенные для координации работы отдельных механизмов установки или установки в делом, являются системами автоматического жесткого управления (САЖУ). Системы автоматического регулирования (САР) технологических процессов обеспечивают поддержание регулируемой величины на заданном уровне или изменение ее по заданной программе. Системы автоматического контроля (САК) содержат средства и методы для получения информации о текущих значениях параметров технологических процессов (температуры, давления, запыленности или загазованности воздуха и др.) без непосредственного участия человека. Системы автоматической защиты (САЗ) и блокировки (САБ) предотвращают возникновение аварийных ситуаций в работе оборудования при установившемся режиме.