

2. Определение места судна способом Крюйс-расстояния.
Определение места судна но крюйс-расстоянию.
Если в виду судна имеется только один ориентир и нет уверенности в поправке компаса, но есть возможность измерить расстояния до ориентира, то место судна определяется методом крюйс-расстояния.
Практические выполнения и точность.
1. Сличают карту с местностью и надежно описывают ориентир (А).
2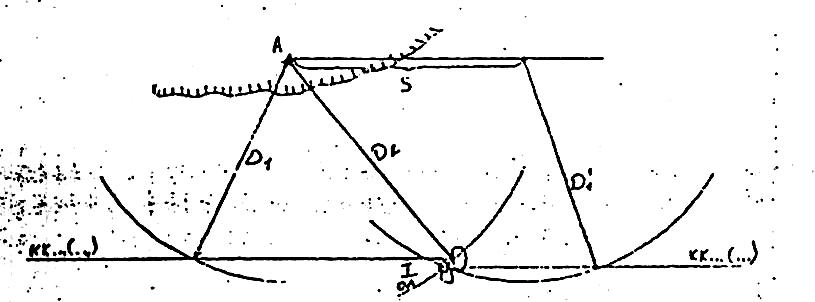 .
Измеряют
расстояние Д1 до ориентира, замечают
время T1
и
отсчет лага ОЛ1
.
Измеряют
расстояние Д1 до ориентира, замечают
время T1
и
отсчет лага ОЛ1
3. Выждав когда направление ориентира поменяется на 30° и более измеряют расстояние до ориентира Д2, замечают время T2 и отсчет лага ОЛ2.
4. Измеренные Д1 и Д2 исправляем поправками, а от ориентира «А» прокладывают путь (ИК), и по нему откладывают пройденное расстояние S с учетом действия течения получают точку В.
5. Из точки A как центра проводят окружность расстоянием Д2, а из точки B проводят окружность расстоянием Д1. Пересечение окружностей дает счислимо - обсервованое место судна.
Точность способа удовлетворительна, точность зависит от точности измерения расстояния, ошибок компаса и лага, учета дрейфа и течения, ошибок рулевого. Поэтому при первой возможности следует определить место судна другим более точным способом.
3. Принцип действия блок-схемы эхолотов. Комплекс приборов эхолотов нэл - 5 и нэл - 10, их назначение и эксплуатация.
Измерение глубин современными эхолотами основано на определении промежутка времени между моментами излучения и приема отраженного от дна сигнала. Принципиально эхолоты могут отличаться лишь способом определения и регистрации промежутков или функций этого времени. В эхолотах отечественного производства применяется: а) метод среднего значения анодного тока тиратрона или электронной лампы, пропорционального глубине, и б) метод линейной развертки времени.
Первый метод применяется для измерения малых глубин. Второй метод применяется во всех морских навигационных эхолотах типа НЭЛ в связи с тем, что он является наиболее надежным, простым и обеспечивающим автоматическую запись глубин достаточно простыми конструктивными средствами.
Навигационный эхолот состоит из следующих узлов: 1) центральный прибор - индикатор; 2) генератор-возбудитель; 3) вибраторы: 4) усилитель.
В центральном приборе сосредоточены все основные органы управления эхолотом. Центральными приборами являются индикаторы (самописцы или указатели глубин). Основа индикатора - электродвигатель, вращающийся с постоянным числом оборотов. В современных эхолотах применяются два принципиально различных способа возбуждения вибраторов-излучателей: ударный способ и импульсивный способ; применяются два вида вибраторов: пьезоэлектрические и магнитострикционные. В морских навигационных эхолотах стоят магнитострикционные вибраторы. Усилители в эхолотах - резонансного типа, имеют на входе контур, настроенный на частоту вибратора. Усилители выполняются в виде отдельных блоков.
Эхолот предназначен для измерения глубин от 1 до 2000 м. Он имеет два индикатора - визуальный указатель глубин и самописец. Указатель имеет два диапазона измерений: 0-100м и 0-2000м и две шкалы с ценой деления 0,5 и Юм. Снятие показаний визуальным способом производится по вспышкам неоновой лампы. Электродвигатель питается переменным током. Самописец имеет три диапазона измерений: 0-200м, 1000-2000м и две шкалы 0-200м и 0-1000м. Усилитель выполнен в виде отдельного блока. Вибраторы эхолота рассчитаны на установку в прорези днища судна. Эхолот рассчитан на скорость звука в воде, равную 1500м/сек. Совместная работа указателя глубин и самописца невозможна. Питание эхолота осуществляется от судовой сети переменного тока 127/220 В, частотой 50 Гц или от сети постоянного тока. Глубины, измеренные эхолотом, имеют погрешности, обусловленные разнообразными причинами. Эти погрешности можно свести к трем группам:
• Погрешности, обусловленные внешними факторами: соленость воды, температура, гидростатическое давление.
• Погрешности, обусловленные влиянием внешних помех: электрические, вибрационные, гидроакустические.
• Инструментальные погрешности и погрешности установки.
От правильного выбора места установки эхолотов зависит надежность измерения глубин на ходу и на качке, а также надежность измерения малых глубин. Пригодность места для установки эхолота подбирается экспериментальным путем. При установке приборов комплекта необходимо обеспечить удобство управления, снятия отсчетов показаний, а также свободный доступ для осмотра, регулировок и ремонта.