

2. Использование ограждающих изолиний: опасные углы, пеленга, расстояния.
При плавании в узкостях определение места судна запаздывает по отношению к опасностям, а иногда его невозможно определить точно и быстро. Тогда для безопасности плавания используют ограждающие изолинии.
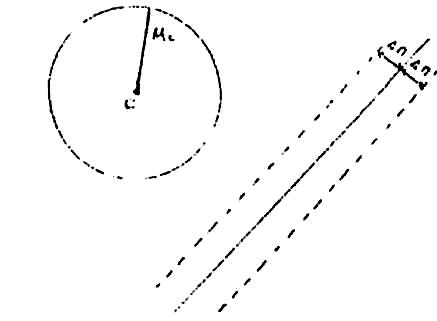
О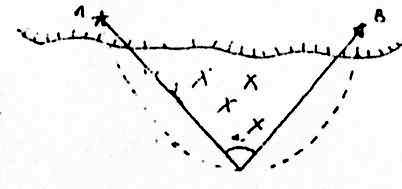 граждающий
горизонтальный угол применяется, когда
на виду у судна имеется два четких
ориентира, нанесенных на карту.
граждающий
горизонтальный угол применяется, когда
на виду у судна имеется два четких
ориентира, нанесенных на карту.
Ha карте проводят окружность, так чтобы она охватывала опасности и проходила через ориентиры, после этого определяют угол опасности ( ). В плавании измеряют секстаном угол , если он больше расчетного, то судно идет к опасности, если меньше - проходит чисто.
О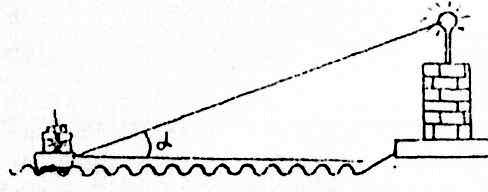 граждающий
вертикальный угол или расстояние
применяется тогда, когда в виду судна
имеется ориентир для РЛС или ориентир
с известной высотой h.
граждающий
вертикальный угол или расстояние
применяется тогда, когда в виду судна
имеется ориентир для РЛС или ориентир
с известной высотой h.
Ha карте строят окружность, так чтобы она охватывала опасности, определяют радиус окружности и рассчитывают угол - в минутах:
![]()
П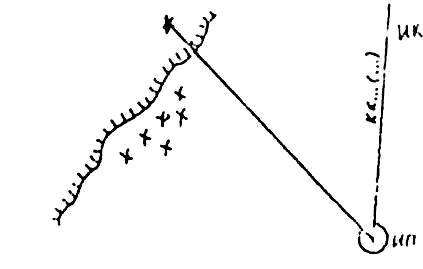 ри
использовании РЛС находят ориентир с
хорошо выраженным эхо- сигналом и
измеряют расстояние. Уменьшение
расстояния означает, что приближается
опасность. Ограждающий пеленг применяется,
когда имеется один ориентир расположенный
близко к направлению ДП судна.
ри
использовании РЛС находят ориентир с
хорошо выраженным эхо- сигналом и
измеряют расстояние. Уменьшение
расстояния означает, что приближается
опасность. Ограждающий пеленг применяется,
когда имеется один ориентир расположенный
близко к направлению ДП судна.
Ha карте прокладывают ограждающие пеленга, рассчитывают их значение, переводят их в положение и при плавании контролируют, чтобы плавание ОКП не вело к опасности.
Использование одной линии положения. Полная обсервация положения не всегда возможна, в этом случае нужно проанализировать расположение одной линии положения относительно счислимой точки.
а )
линия положения находится внутри
окружности вероятного места судна.
Вероятное место судна будет на
)
линия положения находится внутри
окружности вероятного места судна.
Вероятное место судна будет на
![]() к
линии положения точки F.
к
линии положения точки F.
б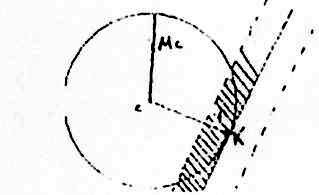 )
линия положения касается окружности
вероятного места судна. Вероятное место
судна будет находиться на
к
линии положения примерно на расстоянии
)
линия положения касается окружности
вероятного места судна. Вероятное место
судна будет находиться на
к
линии положения примерно на расстоянии
![]()
в) линия окружности не лежит в пределах окружности вероятного места судна.
B этом случае счисление подправить нельзя, т.к. ошибки в счислении или линии положения превысили допустимые пределы, нужно усилить контроль за счислением и постараться сделать надежную обсервацию.
3. Комплекс приборов авторулевого абр (ар) их назначение, порядок включения и эксплуатация авторулевого. Режимы работы авторулевого.
Одним их важных для транспортного судовождения приборов, работающих от гирокомпаса, является авторулевой - прибор, позволяющий автоматизировать процесс управления судовым рулевым приводом. Авторулевой позволяет экономить от 3 до5% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия руля (поскольку углы перекладки руля при автоматическом управлении на 20-30% меньше, чем при ручном). Это приводит, в свою очередь, к уменьшению износа рулевой машины. В настоящее время на судах морского транспортного флота эксплуатируются бесконтактные авторулевые типа АБР и АР.
Принцип действия контактных авторулевых заключается в следующем: при отклонении судна от заданного курса приемник гирокомпаса через механизм люфта и механический дифференциал перекатит контактный ролик на одно из контактных полуколец и замкнет линию питания исполнительного двигателя. Исполнительный двигатель начнет перекладывать руль и будет осуществлять перекладку до тех пор, пока приемник обратной связи через механизм люфта, редуктор и механический дифференциал не возвратит ролик в среднее положение (на изоляционный промежуток). Если угол первичной кладки руля мал и судно продолжает уклоняться от курса, контактный ролик снова замкнет то же полукольцо и руль переложится на добавочный угол - угол вторичной кладки руля. Этот угол меньше, чем угол первичной кладки, так как мертвый ход в цепи обратной связи уже выбран.
Как только судно под действием переложенного руля начнет возвращаться/ к курсу, контактный ролик перекатится на другое полукольцо и исполнительный двигатель начнет перекладывать руль к диаметральной плоскости.
Авторулевой АР предназначен для установки на вновь строящихся судах. Он имеет комбинированный пульт управления, совмещающий в себе схемы автоматического, следящего и штатного управления.
Авторулевой АР предназначен для использования на эксплуатируемых судах. Его пульт управления устанавливается в рулевой рубке рядом со штатным рулевым постом.
Авторулевые АР и АБР обеспечивают:
а) автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при состоянии моря до 7-8 баллов (авторулевой не рассчитан на управление рулевым приводом при движении судна на заднем ходу);
б) управление рулевым приводом в зависимости от угла и скорости ухода судна с курса;
в) автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и пр.;
г) изменение курса судна при автоматическом управлении на любую величину;
д) управление рулевым приводом вручную, пользуясь штурвалом следящего управления;
е) изменение курса судна при помощи выносных постов управления (ВПУ) в случае внезапного появления опасности.
Авторулевые АР и АБР отличаются лишь в части комплектации, принципиальные схемы приборов аналогичны.