

13. Опишіть принцип зворотного зв’язку, наведіть приклади позитивного і негативного зворотнього зв’язку.
Полягає у тому, що вихідні сигнали системи знову подаються на вхід, робить можливим адаптивність такої системи в рамках замкнутого контуру. До складу керуючого елемента включено новий компонент, який порівнює еталонне значення у* з біжучим вихідним значенням у. Різниця e=y-y* аналізується керуючим елементом, і на підставі цього аналізу коригується вхідний сигнал х.
Приклад негативного зворотнього зв’язку (закон рівноваги попиту та пропозиції). Нехай під впливом тих чи інших факторів зростає ціна на певний товар. З одного боку зростає вигода виробництва, отже збільшується пропозиція. З іншого боку за рахунок зростання ціни спадає попит, забезпечуваний грошима. В результаті ціна на товар починає падати; відбувається повернення до точки рівноваги.
Приклад позитивного зворотнього зв’язку (модель розвитку інфляції). нехай під впливом тих чи інших факторів знижується курс національної валюти, що призводить до падіння життєвого рівня населення. Якщо з метою компенсації життєвого рівня уряд приймає рішення про грошову емісію, то в результаті відбудеться подальше знецінення національної валюти.
Ключовим поняттям керування є поняття „контур”. Розрізняють два основні типи контурів керування: замкнений і розімкнений.
На рис. 2.1 продемонстровано найпростіший розімкнений контур, який передбачає наявність двох основних елементів: керуючого та керованого. Для простоти викладу припускаємо, що кожний елемент має одну вхідну і одну вихідну величину (один вхід і один вихід). Вихідні сигнали керуючого елемента є вхідними для керованого елемента. Таким чином, для забезпечення потрібної вихідної реакції керованого елемента, потрібно перш за все налаштувати керуючий елемент.
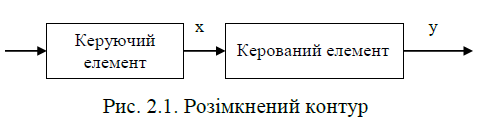
Рис. 2.1. Розімкнений контур
Очевидно, що розімкнений контур є недостатньо гнучким. При будь-якому зовнішньому впливі на керований елемент потрібно пере налаштовувати систему. Виникає питання: як автоматизувати таке переналагодження? Іншими словами: як надати контуру адаптивних властивостей? Один з фундаментальних принципів теорії автоматичного керування і кібернетики – принцип зворотнього зв’язку, який полягає у тому, що вихідні сигнали системи знову подаються на вхід, робить можливим адаптивність такої системи в рамках замкнутого контуру.
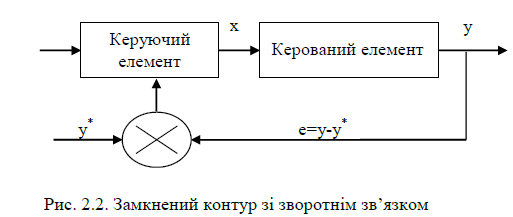
До складу керуючого елемента включено новий компонент, який порівнює еталонне значення у* з біжучим вихідним значенням у. Різниця e=y-y* аналізується керуючим елементом, і на підставі цього аналізу коригується вхідний сигнал х.
Взагалі, на вхід системи може подаватись довільна функція F(у) від виходу. В залежності від вигляду цієї функції розрізняють два основні типи зворотнього зв’язку:
негативний, спрямований на ліквідацію відхилення реакції системи від певного режиму;
позитивний, спрямований на збільшення відхилення.
Кібернетична система може мати будь-яку кількість позитивних і негативних зв’язків.
Наведемо приклади зворотних зв’язків у соціально-економічних системах.
Приклад негативного зворотнього зв’язку (закон рівноваги попиту та пропозиції). Нехай під впливом тих чи інших факторів зростає ціна на певний товар. З одного боку зростає вигода виробництва, отже збільшується пропозиція. З іншого боку за рахунок зростання ціни спадає попит, забезпечуваний грошима. В результаті ціна на товар починає падати; відбувається повернення до точки рівноваги.
Приклад позитивного зворотнього зв’язку (модель розвитку інфляції). нехай під впливом тих чи інших факторів знижується курс національної валюти, що призводить до падіння життєвого рівня населення. Якщо з метою компенсації життєвого рівня уряд приймає рішення про грошову емісію, то в результаті відбудеться подальше знецінення національної валюти.
З наведених прикладів видно, що негативні зворотні зв’язки потрібні для підтримки деякого стану системи, а позитивні для переведення системи з одного стану в інший. тут важливим є поняття „гомеостаз”.
Гомеостазом називається підтримка умов нормального функціонування системи, тобто підтримка найважливіших змінних, від яких залежить стан і поведінка системи, в діапазоні, що забезпечує її нормальне функціонування.