

Полный курс лекций по Теоретической механике / статика
.docСтатика
Ι. Рассмотрим равновесие каждого тела последовательно
1. Tело № 4

Изобразим все заданные силы приложенные к телу 4.
Заданные силы:
cила тяжести (m4g), сила натяжения нити (T43).
Введем систему координат так, как показано на рис (2).
Составим уравнения равновесия:
1)
![]()
1![]() *)
*)
рис 2.
2 .
Tело
№ 3
.
Tело
№ 3
Изобразим все заданные силы приложенные к телу 3.
Заданные силы:
cила тяжести (m3g), силы натяжения нити (T34 , T32), силы реакции опоры (yc xc).
Введем систему координат так, как показано на рис (3).
Составим уравнения равновесия:
1)
![]()
2)
![]()
3)
![]()
рис (3)
1*)
![]()
2*)
![]()
3*)
![]()
По 4-ой аксиоме
статики
![]()
Из 3-его уравнения определяем T32.

Из 2-го уравнения определяем yc;

3. Тело № 2

Изобразим все заданные силы приложенные к телу 2.
Заданные силы:
cила тяжести (m2g), силы натяжения нити (T23 , T21), силы реакции опоры (yB xB).
Введем систему координат так, как показано на рис (4).
Составим уравнения равновесия:
Рис(4)
1)
![]()
2)
![]()
3)
![]()
1*)
![]()
2*)
![]()
3*)
![]()
Из 3-го уравнения определяем T2.
![]()
По 4-ой аксиоме
статики
![]()
Из 2-го уравнения определяем yB.
![]()
![]()
Из 1-го уравнения определяем xB.
 ;
;
4. Тело № 1.
И зобразим
все заданные силы приложенные к телу
2.
зобразим
все заданные силы приложенные к телу
2.
Заданные силы:
cила тяжести (m1g), сила натяжения нити (T12), сила реакции опоры (N), сила трения (Fтр).
Введем систему координат так, как показано на рис (5).
Составим уравнения равновесия:
Рис(5)
1)
![]()
2)
![]()
1*)
![]()
![]() ;
;
2*)
![]()
По 4-ой аксиоме
статики
![]()
Из 2-го уравнения определим N;
![]()
![]()
Необходимое условие равновесия:
Ответ:
![]()
![]()
![]()
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
φ

Кинематика
Таблица №1
-
тело
Vc
ω
1
VA
—
2
—


3
—

4

—



1) Тело №1.
Тело движется
поступательно
![]()
![]()
![]()
![]()
![]()

![]()
![]()

![]()
2) Тело №2.
a)
![]()
![]()
![]()
![]()
![]()
![]()
б)
![]()

3) Тело №3
а)![]()
![]()
![]()
![]()
![]()

![]()
б)
![]()

4) Тело №4
Тело движется
поступательно
![]()
![]()
![]()
![]()
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;

![]()
Таблица №2
Кинематические параметры движения тел системы.
|
Тело№ |
Sc |
Vc |
ас |
φ |
ω |
ε |
|
1 |
|
|
aA |
— |
— |
— |
|
2 |
— |
— |
— |
|
|
|
|
3 |
— |
— |
— |
|
|
|
|
4 |
|
|
|
— |
— |
— |
Таблица №3
Параметры движения тел системы, выраженные через
Параметры движения тела №1
|
Тело№ |
Sc |
Vc |
ас |
γ |
ω |
ε |
|
1 |
Sa |
Va |
aa |
— |
— |
— |
|
2 |
— |
— |
— |
|
|
|
|
3 |
— |
— |
— |
|
|
|
|
4 |
|
|
|
— |
— |
— |
Д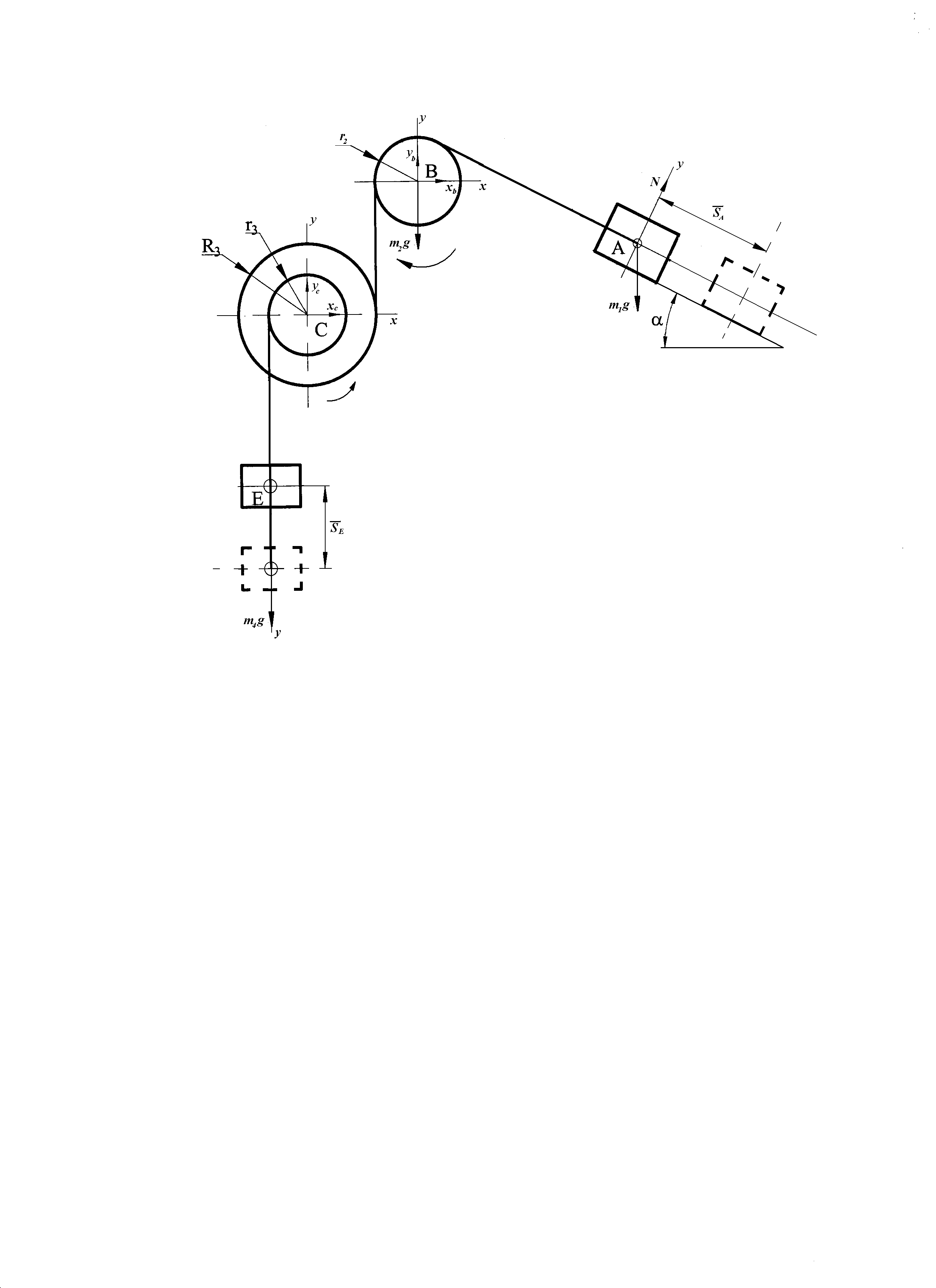 инамика
инамика