

Режими роботи асктп.
В зависимости от степени участия человека в выполнении функции АСУТП различают два режима работы: автоматизированный и автоматический.
Автоматизированный режим. В этом режиме оперативный технологический персонал принимает активное участие в управлении.
А) При ручном управлении (РУ) - технологический персонал по информации, получаемой по различным каналам о состоянии ТОУ, принимает решения об изменении технологического режима и воздействует на процесс дистанционно из операторской с помощью ручных задатчиков или органов управления или же непосредственно, закрывая или открывая запорную арматуру.
Б) В режиме «советчика»ЭВМ рекомендует технологическому персоналу через монитор оптимальные значения наиболее важных режимных параметров (температуры в реакторе, расхода флегмы в ректификационную колонну и т. п.), обеспечивающих достижение цели управления. Технологический персонал на основании своего опыта и знаний анализирует полученные рекомендации, а также информацию о процессе и принимает решение о целесообразности изменения режима. В случае принятия «совета» он вмешивается в работу ТОУ, либо изменяя задания регулятору, либо непосредственно — как при ручном управлении. Недостатком этого режима является то, что оператору зачастую трудно проверить правильность выработанной ЭВМ рекомендации.
В) При диалоговом режиме технологический персонал имеет возможность получать по запросу через монитор дополнительную информацию о настоящем, прошлом и будущем процесса (например, о наличии сырья, о прогнозируемых показателях качества), и лишь после этого принимать решение о целесообразности изменения технологического режима.
Автоматический режим. Этот режим работы АСУТП предусматривает выработку и реализацию управляющих воздействий без участия человека. Реализуются следующие варианты данного режима: супервизорное (косвенное) управление (СУ) - когда ЭВМ автоматически изменяет задания и (или) коэффициенты настройки локальных регуляторов. При этом на программном уровне решаются вопросы защиты ТОУ от опасных и неприемлемых изменений технологических параметров; непосредственное (прямое) цифровое управление (НЦУ) - при котором ЭВМ реализует результаты расчетов по поиску оптимальных режимов путем воздействия на исполнительные механизмы. Естественно, требования к надежности управляющей подсистемы в этом режиме резко возрастают. Она должна учитывать все возможные варианты работы ТОУ и не допустить выход его в неустойчивую зону, в которой возможны аварийные ситуации.Из всех перечисленных режимов наиболее распространен режим «советчика»; при его реализации уменьшается возможность неправильных решений, основанных на неполной информации или принятых в непредвиденных алгоритмами обстоятельствах.
Нормуючий перетворювач,принцип дії,мета застосування.
Нормирующие (промежуточные) преобразователи предназначены для преобразования выходного сигнала первичных преобразователей, не имеющих унифицированного сигнала (стандартные термоэлектрические термометры и термометры сопротивления) и выходного сигнала переменного тока (манометров, дифманометров и других приборов), в унифицированный сигнал постоянного тока. Введение нормирующих преобразователей позволяет сочетать преобразователи с информационно-вычислительными машинами.
Сигнал постоянного тока после сравнения в устройстве сравнения с сигналом обратной связи преобразуется модулятором в переменный ток, который поступает в электронный усилитель переменного тока и после усиления снова преобразуется демодулятором в сигнал постоянного тока. Выходной сигнал с демодулятора в виде постоянного тока или напряжения поступает во внешнюю цепь и на вход преобразователя обратной связи. Модулятор и демодулятор питаются от встроенного генератора.
Дайте визначення термінам: вимірювання, витрата.
Измерение — совокупность операций для определения отношения одной (измеряемой) величины к другой однородной величине, принятой за единицу, хранящуюся в техническом средстве (средстве измерений). Получившееся значение называется числовым значением измеряемой величины, числовое значение совместно с обозначением используемой единицы называется значением физической величины. Измерение физической величины опытным путём проводится с помощью различных средств измерений — мер, измерительных приборов, измерительных преобразователей, систем, установок и т. д.
Расход вещества - это физическая величина, характеризующая количество вещества, прошедшего через поперечное сечениепотока в единицу времени.
Количество вещества может выражаться величиной массы, величиной индивидуальной массы (количеством молей) и величиной объема. Соответственно, различают массовый расход, мольный расход и объемный расход.
Массовый расход (mass discharge) - это масса вещества, проходящего через поперечное сечение потока в единицу времени: mt = m : t, где m - массовое количество вещества в кг, расходуемое за время t в c (секунды), mt - массовый расход вещества в кг/с.
Мольный расход (mole discharge) - это мольное количество вещества, проходящего через поперечное сечение потока в единицу времени: νt = ν : t, где ν - мольное количество вещества в кмоль, расходуемое за время t в c, νt - объемный расход вещества в кмоль3/с.
Объемный расход (volumetric discharge) - это объем вещества, проходящего через поперечное сечение потока в единицу времени: Vt = V : t, где V - объемное количество вещества в м3, расходуемое за время t в c, Vt - объемный расход вещества в м3/с.
31. Централізована АСКТП: визначення, структурна схема, функції технічних засобів і оперативного персоналу, позитивні якості і недоліки, галузь застосування.
Централизованная АСУ ТП является первой и кое-где действующей в настоящее время в химической промышленности из технических структур АСУ ТП. В системах с централизованной структурой вся информация, необходимая для управления автоматизированными технологическими комплексами (АТК), поступает в единый центр – оперативный пункт, где установлены все технические средства АСУТП (исключая источники информации и исполнительные устройства) и где находится оперативный персонал. Оперативный пункт осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы.
Структурная схема централизованной АСУ ТП
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления.
Недостатки централизованной структуры следующие: избыточное число элементов для обеспечения высокой надежности функционирования АСУ ТП, большие затраты дефицитного кабеля для связи.
Централизованную АСУ ТП целесообразно применять для сравнительно небольших по мощности и компактных АТК с невысокими требованиями к надежности.
32. Принцип дії,призначення, та устрій пневматичного регулюючого клапану.
Выполняющие устройства используются для действия (влияния) на технологические процессы (ТП) с помощью изменения расхода разных газообразных и жидкостных сред, которые перемещаются при работе производств. Изменяя эти расходы, можно руководить производительностью (мощностью) технологических объектов, поддерживая оптимальные для ТП значение уровней, давлений, составов сред и т.д. В химической промышленности наиболее часто используют пневматические регулирующие клапаны.
Пневматический регулирующий клапан состоит из пневматического исполняющего механизма (пневматического мембранного поводу) и регулирующего органа (клапан имеет два седла).
Мембрана своим жестким центром, который связан со штоком, зажата между двумя крышками, создавая в верхней части герметически закрытую полость. Сжатый воздух под давлением от регулятора может подаваться в верхнюю полость над мембраной площадью и перемещать ее вместе со штоком вниз на расстояние. При этом пружина с жесткостью сжимается и уравновешивает усилие, которое действует на мембрану сверху.
Перемещаясь в седле, плунжеры меняют проходное сечение клапана и дросселируют поток вещества, которое проходит сквозь него. При увеличении давления воздух над мембраной шток вместе с плунжерами двигается вниз и прикрывает проходное сечение клапана, которое вызывает уменьшение расхода вещества. При уменьшении давления воздуха в полости над мембраной пружина поднимает соответственно шток с плунжерами, и клапан открывается, что вызывает увеличение расход вещества, которое проходит сквозь него.
Во избежание истекания вещества, которое может просачиваться через клапаны наружу, используются сальниковое устройство с лубрикатором, через которое в сальник штока периодически добавляется масло. При подаче через клапан вещества с высокой или низкой температурой для поддержания нормальных условий работы сальникового устройства клапаны изготовляются с ребристой поверхностью.
33.Дайте визначення термінам:рівень,ротаметр
Уровень - горизонтальная плоскость, представляющая собой границу высоты расположения чего нибудь. Для определения уровня жидкости в резервуарах, сосудах используют приборы – уровнемеры.
Ротаметр — прибор для определения объёмного расхода газа или жидкости в единицу времени. Ротаметр состоит из конической трубки, расходящейся вверх, внутри которой перемещается поплавок-индикатор. Измеряемый поток жидкости или газа проходит через трубку снизу вверх и поднимает поплавок. Чем выше поплавок, тем больше площадь вокруг него, через которую может течь поток. Поднявшись настолько, что сила тяжести уравновешивает подъёмную силу со стороны потока, поплавок останавливается. Таким образом, каждому положению поплавка соответствует определённый расход — определение этого соответствия называется градуировка (калибровка). Сравнительно простое и потому надёжное устройство. Для изготовления не требуются сложные технологии или дорогие материалы, что обеспечивает широкое распространение ротаметров. К недостаткам относится высокая чувствительность к изменению физических свойств измеряемой среды.
34.Пропорційно-інтегральний регулятор.
Для использования преимуществ пропорционального и интегрального регулирования в системах автоматического регулирования широко применяются регуляторы, формирующие одновременно пропорциональную и интегральную составляющие. Такие регуляторы называются пропорционально – интегральными (ПИ – регуляторами).
Уравнение такого регулятора имеет следующий вид:

Параметрами
настройки ПИ-регулятора являются:
коэффициент усиления (пропорциональности)
и постоянная времени интегрирования
 .
.
Структурную схему
можно представить в виде параллельного
соединения пропорционального и
интегрирующего звеньев (а).
Другая возможная структурная схема
ПИ-регулятора – со взаимозависимыми
параметрами настройки – б.
В регуляторах
такого типа при настройке коэффициента
усиления регулятора
изменяется и постоянная времени
интегрирования
или время изодрома
 .
.

Объединение в одном регуляторе двух законов регулирования обеспечивает скорость действия пропорционального и статическую точность интегрального.
35. Розподілена (децентралізована) АСКТП: визначення, просторова або функціонально-цільова декомпозиція керування, обґрунтування позитивних якостей розподілених АСКТП.
В АСУ ТП данного вида различные функции могут быть выполнены несколькими взаимосвязанными процессорами, объединенными в вычислительную сеть. Широкое применение в распределенных АСУ ТП микроЭВМ позволяет приблизить средства обработки данных к ТОУ, сохранить потоки информации к центральному ВК и осуществить комплекс мер по повышению надежности АСУ ТП – самодиагностику технических средств, автоматическое резервирование, обнаружение и исправление неисправностей.
Распределенная система управления (РСУ) сочетает преимущества систем управления, основанных на вычислительной технике, с достоинствами децентрализованных систем, основанных на локальных средствах автоматики, которым присуща «живучесть».
Различают функциональные и территориальное разделение РСУ.
Функциональная децентрализация предполагает упрощение процесса управление, распределяя отдельные функции управление и их реализацию на отдельные ПЭВМ. Такой подход повышает надежность и эффективность системы управления в целом.
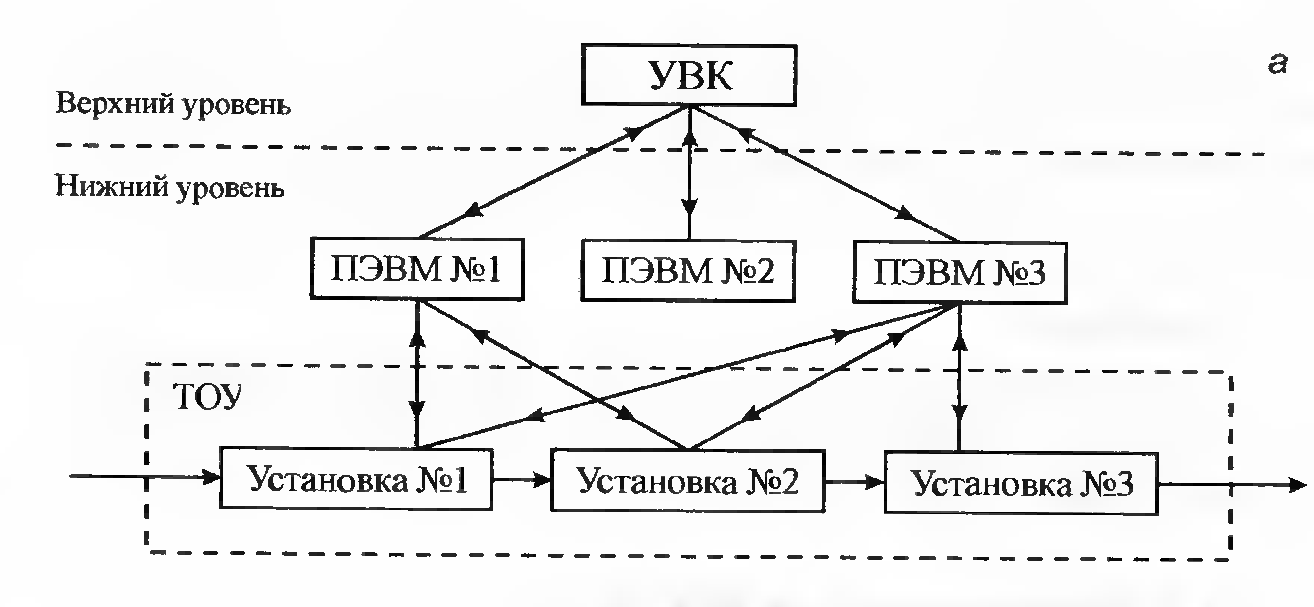
Территориальная децентрализация предполагает территориальное распределение микроЭВМ по технологическим участкам объекта управления, т.е. приближая средства обработки информации к ее источникам и потребителям (к установкам ТОУ).
Дайте визначення термінам:Контроль, управління
Контроль — одна из основных функций системы управления. Контроль осуществляется на основе наблюдения за поведением управляемой системы с целью обеспечения оптимального функционирования последней (измерение достигнутых результатов и соотнесение их с ожидаемыми результатами). На основе данных контроля осуществляется адаптация системы, то есть принятие оптимизирующих управленческих решений.
Управление - совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта, в соответствии с заданной целью управления (на вершине человек). Цель управления формируется вне системы управления, то есть является входной величиной.
Дайте визначення термінам:час ізодрому,час запізнення.
Время изодрома - это время в течение которого управляющее воздействие регулятора становится равным удвоенному значению величины, определяемой пропорциональной составляющей.
Время запаздывания-это время между нарушением равновесия (то есть входным воздействием) и началом изменения выходной величины. Запаздывание бывает:
транспортное-возникает из-за замедленности транспортировки вещества или энергии через трубопровод
емкостное - в случае объекта с распределенными параметрами (многоемкостные).
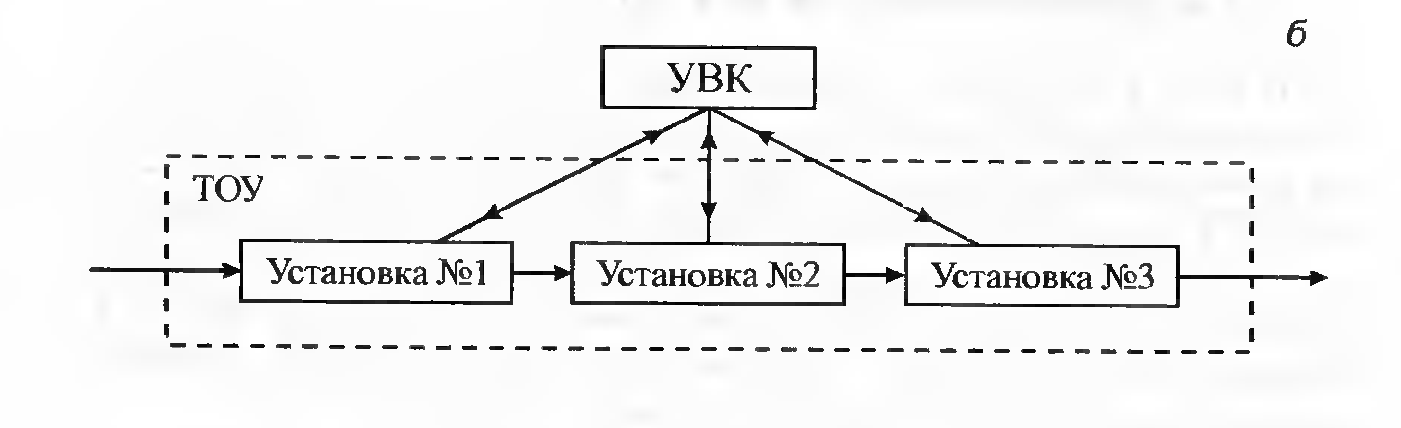
38. Характеристика розподілених АСКТП з радіальною, магістральною та кільцевою структурами.
Распределенные АСУТП - функции АСУТП когут выполняться несколькими процесорами объединенными в сеть, что позволяет сократить поток информации к вычеслительному комплексу и повысить надежность АСУТП.
Чаще всего распределенные АСУ ТП имеют трехуровневую структуру. Пример структурной схемы комплекса технических средств такой системы приведен на рисунке 1.
На верхнем уровне с участием оперативного персонала решаются задачи диспетчеризации процесса, оптимизации режимов, подсчета технико-экономических показателей производства, визуализации и архивирования процесса, диагностики и коррекции программного обеспечения системы. Верхний уровень АСУ ТП реализуется на базе серверов, операторских (рабочих) и инженерных станций.
На среднем уровне — задачи автоматического управления и регулирования, пуска и останова оборудования, логико-командного управления, аварийных отключений и защит. Средний уровень реализуется на основе ПЛК.
Нижний (полевой) уровень АСУ ТП обеспечивает сбор данных о параметрах технологического процесса и состояния оборудования, реализует управляющие воздействия. Основными техническими средствами нижнего уровня являются датчики и исполнительные устройства, станции распределенного ввода/вывода, пускатели, концевые выключатели, преобразователи частоты.
Автоматичні регулятори їх види, різновиди, переваги та недоліки
Пропорциональный регулятор(П-регулятор). Закон регулирования - линейный закон регулирования, отображает прямопропорциональную зависимость между изменением управляющего воздействия и ошибкой регулирования.
 ,где
-
коэффициент усиления - параметр настройки
пропорціонального регулятора.
,где
-
коэффициент усиления - параметр настройки
пропорціонального регулятора.
Достоинства: быстродействие. Недостатки: дает заметную ошибку.
Интегральный регулятор(И-регуляор). Закон регулирования – управляющее воздействие пропорционально скорости изменения ошибки регулирования.

Достоинства: действует точно. Недостатки: медленный.
Пропорционально-интегральный.Закон-недостатки
П и И регуляторов устраняютсься при их
совместном использовании в
Пропорционально-интегральном
регуляторе,который формирует одновременно
П и И составляющую.
 .
.
Достоинства: быстрый и точный; Недостатки: необходимость настраивать 2 регулятора.
Пропорционально-дифференциальный
(ПД) регулятор – в закон регулирования
вводят составляющую пропорциональную
скорости изменения ошибки регулирования.

Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Стадії створення АСКТП,їх характеристика
Процесс создания АСУТП представляет собой совокупность упорядоченных во времени, взаимосвязанных, объединенных в стадии и этапы работ.
Стадия "Формирование требований к АСУТП" включает в себя такие этапы:
Обследование объекта и обоснование необходимости создания АСУТП;
Формирование требований Заказчика к АСУТП;
Оформление Отчета о выполненной работе, и Заявки на разработку АСУТП.
Стадия "Разработка концепции АСУТП" заключается в:
Изучение объекта автоматизации;
Проведение необходимых научно-исследовательских работ;
Разработка вариантов концепции АСУТП и выбор варианта концепции АСУТП в соответствии с требованиями Заказчика
Стадия "Техническое задание" заключается в:
Разработка и утверждение Технического задания на создание АСУТП.
Стадия "Эскизный проект" состоит из следующих этапов:
Разработка предварительных проектных решений по Системе и ее частям;
Разработка документации на АСУТП и ее части.
Стадия "Технический проект" состоит из следующих этапов:
Разработка проектных решений по Системе и ее частям;
Разработка документации на АСУТП и ее части;
Разработка и оформление документации на поставку изделий для комплектования АСУТП и технических требований (технических заданий) на их разработку;
Разработка заданий на проектирование в смежных частях проекта.
Стадия "Рабочий проект " включает в себя следующие этапы:
Разработка рабочей документации на АСУТП и ее части;
Разработка и конфигурация программного обеспечения
Стадия "Ввод в действие" состоит из следующих этапов:
Подготовка объекта автоматизации к вводу АСУТП в действие;
Подготовка персонала;
Комплектация АСУТП поставляемыми изделиями;
Строительно-монтажные работы;Пусконаладочные работы;
Проведение Предварительных испытаний;
Проведение Опытной эксплуатации;
Проведение Приемочных испытаний.
Стадия "Сопровождение АСУТП" включает в себя:
Выполнение работ в соответствии с гарантийными обязательствами;
Послегарантийное обслуживание.
Функціональна структура АСКТП
Централизованный контроль
Основная информация, характеризующая состояние объектов контроля, поступает автоматически с помощью устройств ввода аналоговых и дискретных сигналов. Дополнительная информация (данные «ручных» анализов, различные уставки, задания режимов и т. п.) вводится оператором процесса с клавиатуры устройств ввода-вывода. Информация, считываемая с устройств связи с объектом, проходит операции первичной обработки, подготавливающие ее для использования в основных задачах АСУ ТП. Первичная обработка аналоговых сигналов включает масштабирование, сглаживание, контроль на достоверность, проверку на граничные значения. Результатом работы программ сбора и первичной обработки информации являются текущие данные о ходе технологического процесса и состоянии оборудования. Подготовленные в таком виде данные используются в различных задачах управления технологическим процессом и представления информации оператору.
Диагностика
Цель диагностики состоит в определении технологической ситуации, состояния технологического оборудования и КТС АСУ ТП.
Анализ технологических ситуаций, как правило, не выделяется в отдельные программы, но элементы этой задачи всегда содержатся во многих программах контроля и управления отдельными агрегатами и технологическими линиями. Анализ сводится к определению предаварийных состояний ТП: замазывание решетки мельницы, отсутствие материала на входе агрегата (там, где это нельзя определить путем непосредственного измерения), резкое изменение характеристик сырья и т. п. Поскольку нарушения могут наблюдаться в работе КТС АСУ ТП или оборудования, а также в ходе ТП, то выделяются три соответствующих блока диагностики. Диагностика осуществляется путем проверки показаний датчиков на попадение в допуски по величине или скорости изменения или более сложным путем логического анализа данных проверок нескольких датчиков. В блоке диагностики осуществляется также проверка готовности ТОУ к автоматизированному управлению.
Управление технологическим процессом в номинальном режиме Если в блоке диагностики не выявлено тех или иных нарушений в работе КТС, оборудования или функционирования ТП, а также установлена готовность АТК к автоматизированному управлению, то управление передается в блоки статической оптимизации и динамической стабилизации. В блоке оптимизации осуществляется поиск наиболее выгодного режима функционирования ТП, удовлетворяющего всем технологическим ограничениям. В блоке стабилизации вырабатываются управляющие воздействия на материальные и энергетические потоки, направленные на поддержание характеристик ТП на уровне оптимальных режимных значений. В двух указанных блоках осуществляются наиболее сложные математические расчеты, основанные на использовании заранее построенных математических моделей ТП. Такие модели позволяют спрогнозировать поведение ТП при реализации различных управляющих воздействий.
Ситуационное управление Функционирование АСУ ТП в случае тех или иных нарушений определяется блоком ситуационного управления. В зависимости от типа ситуации, который должен быть выявлен в блоке диагностики, производятся: корректировка структуры управления в режимах оптимизации и (или) стабилизации (например, может быть снят с управления блок оптимизации; отключены некоторые контуры стабилизации; изменены настройки соответствующих алгоритмов управления); переход к алгоритмам управления, имитирующим логику управления опытных операторов в сходных ситуациях; отказ от НЦУ и переход к управлению в режиме совета оператору. Представление информации оператору
Информация о состоянии ТП может представляться оператору системы в виде текстов, таблиц, графиков, рисунков. В состав ПО ОСУ ТП могут включаться программы: вывода экстренных сообщений на печать, экран дисплея, табло, мнемосхему; периодического вывода текущей информации на печать или экран дисплея; печати сменных и суточных рапортов, сводок, таблиц основных показателей; вывода отдельных показателей по запросу оператора.
42.
Дайте визначення термінам:Щільність, управління
Плотность(ρ) физическая величина, определяемая для однородного вещества его массой в единице объёма. П. неоднородного вещества — предел отношения массы к объёму, когда объём стягивается к точке, в которой определяется П. Отношение П. двух веществ при определённых стандартных физических условиях называется относительной П
Управление – это совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта, в соответствии с заданной целью управления.
43.
Назвіть та охарактеризуйте закони регулювання.
П-закон регулирования
Идеальный П-регулятор имеет передаточную функцию вида Wу(p)=Kу. Реальный аналоговый промышленный регулятор должен иметь усилительное звено с передаточной функцией Wу(p)=Kу и исполнительное устройство, например в виде электрического исполнительного механизма с передаточной функцией Wим(p)=1/Tимp. Электрический исполнительный механизм является интегрирующим звеном, и, следовательно, для получения П-закона регулирования его необходимо охватить отрицательной обратной связью. Для обеспечения условия Wо.с.(p) >> 1 / Wу.с.(p) с целью повышения коэффициента передачи прямого канала этой отрицательной обратной связью следует охватить и усилительное звено с передаточной функцией регулятора Wу(p)=Kу.
Требуемую передаточную функцию канала обратной связи найдем из условия: Wп (p) = KР = 1 / Wо.с.(p)
откуда
Wо.с.(p) = 1 / KР = Kо.с.
Таким образом, канал обратной связи должен быть выполнен в виде усилительного звена с коэффициентом передачи Ко.с., т.е. равным обратному значению коэффициента передачи П-регулятора.
ПИ-закон регулирования
Для комплексного использования преимуществ законов П- и И-регулирования в автоматизированных системах широко применяют регуляторы, формирующие пропорционально-интегральный закон регулирования.
Регулятор, в котором совмещены свойства пропорционального и интегрального регуляторов, называют ПИ-регулятором. ПИ-регуляторы обеспечивают поддержание регулируемой величины на заданном значении без остаточного отклонения.
ПИ-регуляторы оказывают воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величин
В динамическом отношении ПИ-регулятор эквивалентен параллельному соединению П-регулятора с передаточной функцией Wп(p)=КР и И-регулятора с передаточной функцией Wи(p)= 1/Ти р
Передаточную функцию канала обратной связи можно найти из условия:
если Wо.с. (p) = K / (Tp+1)
где К = Тиз / КРТим, Т = Тиз.
В данной структурной схеме для обеспечения закона ПИ-регулирования применяют апериодическое звено.
Построим модель Пи-регулятора показанного на рисунке 7.
Результат моделирования Пи-регулятора при КР=1 и Ти=3.5
Результат моделирования Пи-регулятора при КР=5 и Ти=6.
По результатам исследования видно, что параметроми настройки регулятора являются коэффициент передачи КР и постоянная времени Ти. При настройке коэффициента усиления КР будет изменяться и постоянная времени интегрирования Ти. Если при настройке ПИ-регулятора установить очень большое значение постоянной времени Ти, то он превратится в П-регулятор. Если установить очень малые значения КР, то получим И-регулятор.
Пропорционально-интегрально-дифференциальный закон регулирования
Эти регуляторы воздействуют на объект регулирования пропорционально отклонению Е регулируемой величины, интегралу этого отклонения и скорости изменения регулируемой величины
Передаточная функция ПИД-регулятора (3.2.46) имеет вид:
Wпид (p) = KР + 1/Tиз р + Тд р (7)
Передаточная функция ПИД-регулятора (3.2.47) имеет вид:
Wпид (p) = KР (1 + 1/Tизp + Tпвp) (8)
Параметрами настройки ПИД-регулятора (5) являются коэффициент пропорциональности регулятора КР, постоянная времени интегрирования Ти и постоянная времени дифференцирования Тд.
Параметрами настройки ПИД-регулятора (6) являются КР, Тиз и Тпв. Для таких регуляторов постоянные времени интегрирования Ти=Тиз/КР и дифференцирования Тд=КРТпв зависят от коэффициента передачи регулятора.
ПИД-регулятор по возможностям настройки является универсальным регулятором:
при Тд=0 и бесконечно малом значении Ти получем П-регулятор;
при К,Р=0 и Тд=0 получаем И-регулятор;
при КР=0 и Ти=? получаем Д-регулятор;
при Тд=0 получаем ПИ-регулятор;
при бесконечно большом значении Ти и конечных значениях КР и Тд получаем ПД-регулятор.
Так как фактически реализация идеального дифференцирующего звена представляет большие трудности, то в практических схемах используется реальное дифференцирующее звено. Для уменьшения погрешности в реализации закона ПИД-регулирования интегрирующий исполнительный механизм имеет отрицательную обратную связь Wо.с. (p) = Kо.с. >> 1.
Централізована та супервізорна структура АСКТП.
Централизованная АСУТП харак-ся тем, что все функции обработки и управ-я выполняет одна УВМ. Цент-я АСУТП явл комплексами , как правило занимающие единое ограниченное производственное пространство.УСО под упр-ем УВМ осущест-т коммутацию измерительных каналов, при образовании аналоговых сигналов в цифровые и на оборот, а так же распределение командных сигналов по исполнительным механизмам. Для повышения надежности подобных систем вместо одной УВМ, принимают несколько ЭВМ, с собственной ОС и межмашинной аппаратной связью. Структура супервизорной АСУ ТП состоит из ряда локальных АСР, построенных на базе технических средств индивидуального пользования, и централизованной УВМ. В супервизорных системах на УСО и УВМ возложены функции сбора и переработки информации о состоянии объекта управления, вычисления критерия качества, нахождения оптимального режима, соответствующих управлений и передачи их, как заданий локальным АСР.
Дайте визначення термінам:трьохпровідна система, вимірювання
ИЗМЕРЕНИЕ – процесс нахождения опытным путем с помощью специальных технических средств соотношения между измеряемой величиной и некоторым ее значением, принятым за единицу сравнения.
При трехфазном вводе четырехпроводную линию подводят к потребителям трехфазного тока, а все однофазные токоприемники запитывают от одной фазы по двум фазным группам. Все наружные токоприемники и хозяйственные постройки рекомендуется запитывать отдельной фазной группой с защитным нулевым проводом.
46. Виды и назначение исполнительных механизмов.
Под исполнительным механизмом в общем случае подразумевают блок, преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, который через соответствующую связь осуществляет воздействие на регулирующий орган или непосредственно на объект регулирования.
По виду энергии, создающей регулируемое усилие, ИМ подразделяются на:
§ пневматические,
§ гидравлические
§ электрические.
Существуют ИМ, в которых используются одновременно два вида энергии:
§ электропневматические,
§ электрогидравлические
§ пневмогидравлические.
Наиболее распространенными из них являются электрогидравлические ИМ. Вид энергии управляющего сигнала может отличаться от вида энергии, создающей регулируемое усилие .
Пневматические
В пневматических ИМ регулируемое усилие создается за счет действия давления сжатого воздуха на мембрану, поршень или сильфон. В соответствии с этим пневматические подразделяются на мембранные , поршневые и сильфонные . Давление сжатого воздуха в пневматических ИУ обычно не превышает 103кПа.
Гидравлические
В гидравлических ИМ регулируемое усилие создается за счет действия давления жидкости на мембрану, поршень или лопасть. В соответствии с этим различают:
1. мембранные; 2. поршневые ; 3. лопастные гидравлические ИМ .
Давление жидкости в них обычно находится в пределах (2,5…20)103 кПа . Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на:
§ пружинные. В пружинных ИМ регулируемое усилие в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении – силой упругости сжатой пружины
§ беспружинные . В беспружинных И М перестановочное усилие в обоих направлениях создается перепадом давления на рабочем органе механизма .
Электрические
Электрические ИУ ( Э И У) находят преимущественное распространение в системах автоматизации, использующих изделия электрической ветви ГСП.
Электрические ИМ по принципу действия подразделяются на:
§ электродвигательные
§ электромагнитные ;
по характеру движения выходного элемента на:
§ прямоходные с поступательным движением выходного элемента ,
§ поворотные с вращательным движением до 360° (однооборотные)
§ с вращательным движением на угол более 360° (многооборотные).
При необходимости использовать пневматические и гидравлические ИУ последние дополняются электропневмо - и электрогидропреобразователями .
ЭИУ разделяются на четыре группы :
Э И У позиционного действия ;
Э И У постоянной скорости ;
Э И У переменной скорости ;
усилители мощности .
Исполнительные механизмы Э И У позиционного типа, постоянной или переменной скорости состоят из электродвигателя и редуктора.
Такой ИМ по своим динамическим свойствам соответствует интегрирующему звену, если в качестве выходной переменной в ИУ принят угол поворота (перемещение). Вследствие этого силовая часть может формировать интегральную составляющую таких законов регулирования, как ПИ и П ИД в структуре регулятора.
Другой способ использования ИМ с электродвигателями состоит в охвате двигателя жесткой обратной связью, и в этом случае ЭИУ является пропорциональным звеном (точнее, малоинерционным), положение выходного органа которого пропорционально входному сигналу . ИМ с корректирующими обратными связями используют в ЭИУ переменной скорости.
Качество работы ЭИУ с электродвигателями характеризуют такими показателями , как номинальный момент , время полного хода, выбег, люфт, гистерезис , импульсные характеристики , режим работы .
47. Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Пропорциональная составляющая
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления, при наличии задержек в системе, могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегральная составляющая
Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Тем не менее, интегральная составляющая также может приводить к автоколебаниям.
Дифференциальная составляющая
Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
Пропорционально-интегрально-дифференциальные регуляторы (ПИД-регуляторы) обладают хорошими динамическими и статическими свойствами. Недостатком ПИД-регуляторов является сложность их настройки.
48. Ротаметр — прибор для определения объёмного расхода газа или жидкости в единицу времени.
Устройство и принцип работы
Ротаметр состоит из конической трубки, расходящейся вверх, внутри которой перемещается поплавок-индикатор. Измеряемый поток жидкости или газа проходит через трубку снизу вверх и поднимает поплавок. Чем выше поплавок, тем больше площадь вокруг него, через которую может течь поток. Поднявшись настолько, что сила тяжести FG уравновешивает подъёмную силу Fr со стороны потока, поплавок останавливается. Таким образом, каждому положению поплавка соответствует определённый расход — определение этого соответствия называется градуировка (калибровка). Для отечественных ротаметров градуировка производится на заводе изготовителе по воздуху и воде при норм. условиях. Зарубежные ротаметры, например немецкой фирмы Krohne, как правило градуируются по параметрам измеряемой среды заказчика.
Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс.
Достоинства
Сравнительно простое и потому надёжное устройство
Для изготовления не требуются сложные технологии или дорогие материалы, что обеспечивает широкое распространение ротаметров.
Недостатки
Ротаметр должен располагаться вертикально.
Высота подъёма поплавка-индикатора зависит от плотности и, в общем случае, вязкости протекающего вещества.
Показания ротаметра обычно считываются оператором визуально, что усложняет использование ротаметров в автоматизированных системах.
В ротаметрах с оптическим считыванием положения поплавка протекающее вещество должно быть прозрачным.
Кривая разгона – зависимость от времени параметра системы (t) при внесении в систему возмущающего воздействия. При этом параметр изменяется от начального изменения до установившегося. График имеет S-сообразную форму с точкой перегиба. (ГРАФИК!!!!) С МЕТОДИЧКИ ПО ЛАБАМ!!!
50. Пяти мембранный элемент сравнения по устройству и принципу действия не отличается от трех мембранного. Пяти мембранный имеет четыре измерительные камеры, вследствие чего осуществляется большее число вычислительных операций над четырьмя входными сигналами в зависимости от схемы включения измерительных камер.
По своему назначению элементы сравнения являются аналого-дискретными; однако по принципу действия эти элементы относятся к аналоговым усилителям с большим коэффициентом усиления: их выходной сигнал может принимать не только предельные, но и любые промежуточные значения. Элементы сравнения реализуют также аналоговые операции алгебраического суммирования, повторения, удвоения и т. п., обладают достаточно хорошей статической точностью и быстродействием.
Усилители мощности предназначены для повторения непрерывного входного пневматического сигнала и усиления его по мощности; они применяются в качестве выходных элементов в большинстве приборов, построенных на УСЭППА.
Модификации усилителей различаются принципиальной схемой и техническими характеристиками.
Усилитель первой модификации состоит из четырех камер: питающей (Л), выходной (Б), сброса (В) сжатого воздуха в атмосферу и измерительной (Г). Мембраны 1 и 2 скреплены полым штоком 3, который управляет положением шариковых клапанов.
Входное давление подается в глухую камеру Г и создает на мембране усилие, направленное вниз. Питающий воздух подается в камеру А и через большой шариковый клапан 5 — в проточную выходную камеру Б, где создает на мембране 2 усилие, направленное вверх. Так как эффективные площади мембран одинаковы, то при равенстве усилия, создаваемые этими давлениями на соответствующих мембранах, равны, но направлены встречно, и мембранная сборка находится в равновесии.
При нарушении равенства между мембранная сборка смещается, например, вниз при РВХ>РВЫХ, полый шток нажимает на малый шарик 4, который закрывает отверстие в штоке и открывает отверстие, прикрываемое большим шариком 5. Давление в камере Б увеличивается до значения, равного. Однако мощность выходного воздушного потока по сравнению с входным оказывается большей за счет увеличенного проходного сечения шарикового клапана.
Усилитель мощности второй модификации имеет более сложную схему, но обладает более высокой статической точностью.
Задатчики предназначены для создания стабильного давления сжатого воздуха, подаваемого обычно в глухие камеры элементов. Задание устанавливается при помощи настроечного винта, при вращении которого изменяется натяжение пружины и мембрана устанавливается в новое положение.
Пневматические реле выполняют элементарные логические и счетные операции с дискретными сигналами в пневматических АСР. Реле имеют две основные части: мембранный блок и два пневмоконтакта «сопло—заслонка». Если один контакт замкнут, другой разомкнут.
Командные давления, имеющие одно из двух дискретных значений: 0 или 1 — поступают в камеры реле. Суммарное усилие, действуя по оси штока, перемещает мембранный блок в одно из двух крайних состояний. Определенность выходного сигнала при нулевом командном сигнале достигается или введением в одну из глухих камер постоянного давления (подпора), или с помощью специальной пружины. Суммарное усилие, действуя по оси жесткого центра, вызывает перемещение его в ту сторону, куда направлено результирующее усилие.
Дайте визначення термінам:система, двопровідна система.
Под системой понимают совокупность элементов (или устройств), находящихся в различных отношениях и взаимосвязях между собой и образующих определенную целостность, единство.
Двухпроводная система используется при построении многоканальных систем передачи, работающих на воздушных и радиорелейных линиях.
Дайте визначення та наведіть характеристику кривой розгону.
Свойства промышленных объектов (химические реакторы, ректификационные колонны, абсорберы и др.) обычно выявляют экспериментальным путем. С этой целью технологический объект оснащают аппаратурой для нанесения входных типовых возмущений и определения его ответной реакции во времени.
Кривая разгона - реакция объекта на возмущающее воздействие известной формы.
Для снятия временных характеристик объект исследования приводят в равновесное состояние, а затем с помощью панели дистанционного управления и исполнительного устройства наносят на вход объекта возмущающее воздействие известной формы (ступенчатое или импульсное). Реакция объекта на это возмущение (кривая разгона или импульсная характеристика) регистрируется в координатах: выходная величина — время.
Снятие кривой разгона предусматривает нанесение на объект ступенчатого возмущения путем энергичного изменения степени открытия проходного сечения регулирующего органа; при этом отмечают величину и момент нанесения возмущения. Изменение выходной величины регистрируют до тех пор, пока объект не примет нового установившегося значения (объект устойчивый) или пока скорость изменения выходной величины не станет постоянной (объект нейтральный).
Кривая разгона объекта управления.
РИСУНОК
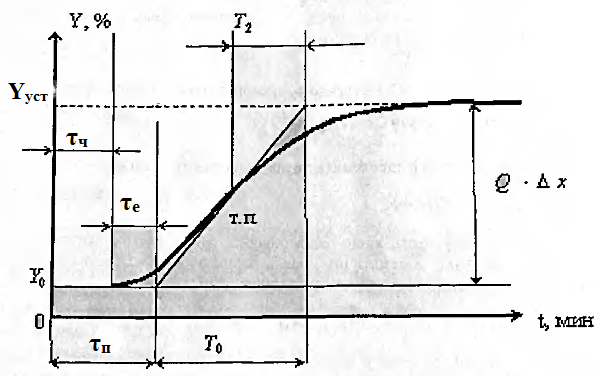 где
Y-выходная
величина, %; Yo
– начальное значение выходной величины,
%; Yуст
–
установившееся значение выходной
величины, %; т. п. -точка пересечения
кривой разгона, t
– текущее время, мин; τп
– время полного запаздования, мин; То
–
постоянная времени, мин; Т1,
Т2
– постоянные времени первого и второго
звена соответственно, мин; τч
– время чистого запаздования, мин; τе
–
время емкостного запаздования.
где
Y-выходная
величина, %; Yo
– начальное значение выходной величины,
%; Yуст
–
установившееся значение выходной
величины, %; т. п. -точка пересечения
кривой разгона, t
– текущее время, мин; τп
– время полного запаздования, мин; То
–
постоянная времени, мин; Т1,
Т2
– постоянные времени первого и второго
звена соответственно, мин; τч
– время чистого запаздования, мин; τе
–
время емкостного запаздования.
Пристрої зв'язку. Принцип роботи та устрій.
Устройства связи с объектом (УСО) используются в АСУ ТП для объединения аналоговых и цифровых параметров реального технологического объекта.
Связь между системой управления и технологическим объектом управления осуществляется с помощью датчиков и исполняющих механизмов, которые невозможно подключить непосредственно к микро-ЭВМ. Выходные сигналы датчиков могут быть представлены в виде аналогового, дискретного и импульсного сигнала. Для превращения этих сигналов в цифровой код используют аналого-цифровые АЦП, дискретно-цифровые ДЦП и импульсно-цифровые ИЦП преобразователи.
Управляющие сигналы от микро-ЭВМ также необходимо превращать в аналоговый сигнал, дискретный, импульсный. Для этого используют цифро-аналоговые преобразователи ЦАП, цифро-дискретные ЦДП или цифро-импульсные ЦИП.
Цифроаналоговые преобразователи применяются для формирования аналогового сигнала, пропорционального входному цифровому сигналу. ЦАП могут входить составной частью в схемы АЦП.
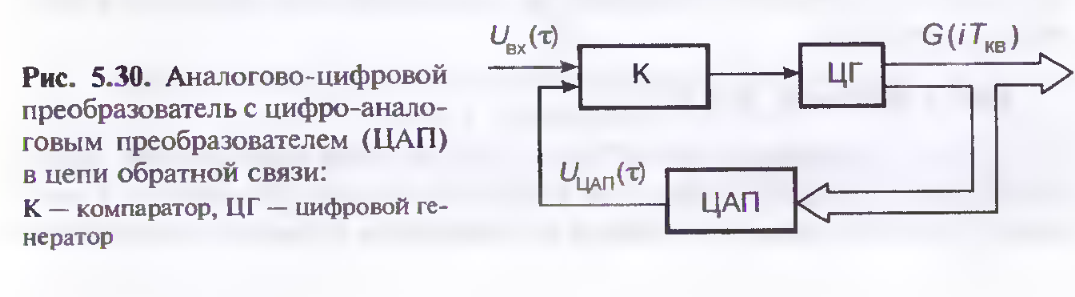
Цифроаналоговые преобразователи часто применяются в АСУ с ЭВМ в контуре управления (в частности, с персональными компьютерами). Кроме того, ЦАП применяются в устройствах АЦП с обратной связью, в которых их используют для формирования аналогового сигнала Uцап(τ), пропорционального входному цифровому сигналу. Этот сигнал сравнивается с преобразуемым аналоговым напряжением Uвх(τ). Выходной сигнал компаратора используют для управления процессом формирования выходного кода. После достижения равенства напряжений Uцап(τ)= Uвх(τ) компаратор обеспечивает фиксацию цифрового кода, значение которого представляет цифровой эквивалент G(iТкв) входного напряжения в соответствующий момент времени (Ткв — такт квантования). Поскольку цифровой входной сигнал может изменяться только дискретными шагами, аналоговый выходной сигнал также будет ступенчатым.
РИСУНОК
Дайте визначення: ТСМ, ПРК.
ТСМ – термопреобразователь сопротивления (медный). Термоэлектрическим преобразователем, или термопарой, называют два разнородных электропроводящих элемента, соединенных на одном конце и образующих часть устройства, использующего термоэлектрический эффект для измерения температуры. В качестве материала для ТСМ использована медь. Диапазон измерений ТСМ: -50…150 (180) Со .
Конструктивно термопреобразователи сопротивления представляют собой тонкую медную проволоку, намотанную бифилярно на специальный слюдяной, фарфоровый или пластмассовый каркас, или свернутую в спираль и вложенную в каналы защитного корпуса. ПРК - пневматический регулирующий клапан. Используется для действия (влияния) на технологические процессы с помощью изменения расходов разных газообразных и жидких сред, которые перемещаются при работе производств. Они расположены на трубопроводах, которые соединяют технологическое оборудование данного производства. Изменяя эти расходы, можно управлять продуктивностью (производительностью) технологических объектов, поддерживать оптимальные для данного технологического процесса значения уровней, давлений, состава сред и т. д. ПРК состоит из двух частей: пневматический исполняющий механизм и регулирующий орган.
Наведіть різновиди структур АСКТП,та їх характеристику.
Разновидности АСУ ТП:
АСУ ТП, в которых все функции выполняются без применения вычислительного комплекса (ВК).
Основные функции: измерение и контроль параметров технологического процесса; стабилизация технологических режимов процесса на уровне, определяемом регламентом производства; программное управление (включая пуск и останов технологического процесса); защита технологического оборудования от аварий; оперативная связь с другими ступенями управления.
АСУ ТП с вычислительным комплексом, выполняющим информационно-вычислительные функции.
Системы этого вида содержат все функциональные элементы, характерные для предыдущей разновидности АСУ ТП, и дополнены вычислительным комплексом (ВК). Выполняет функции централизованного контроля и вычисления комплексных технических и технико-экономических показателей. На оператора-технолога возлагают анализ информации, выработку решений и реализаций управляющих воздействий.
АСУ ТП с вычислительным комплексом, выполняющим функции «советчика» оператора.
Кроме функций, возложенных на ВК в предыдущей разновидности АСУ ТП, вычислительный комплекс решает задачу анализа и принятия решений с выдачей рекомендаций по управлению («советов») оператору-технологу.
4) Супервизорное управление.
ВК включен в замкнутый контур управления и вырабатывает управляющие воздействия по изменению заданий системам автоматического регулирования. Задача супервизорного управления — поддержание процесса вблизи оптимальной рабочей точки, оперативно воздействуя на нее. Функции оператора-технолога сводятся к наблюдению.
АСУ ТП с вычислительным комплексом, выполняющим функции непосредственного (прямого) цифрового управления.
В режиме непосредственного цифрового управления (НЦУ) сигналы, используемые для приведения в действие исполнительных устройств, вырабатываются непосредственно ВК, а автоматические регуляторы исключены из системы или используются как резерв. ВК рассчитывает требуемые значения управляющих воздействий и передает соответствующие сигналы на исполнительные механизмы регулирующих органов.
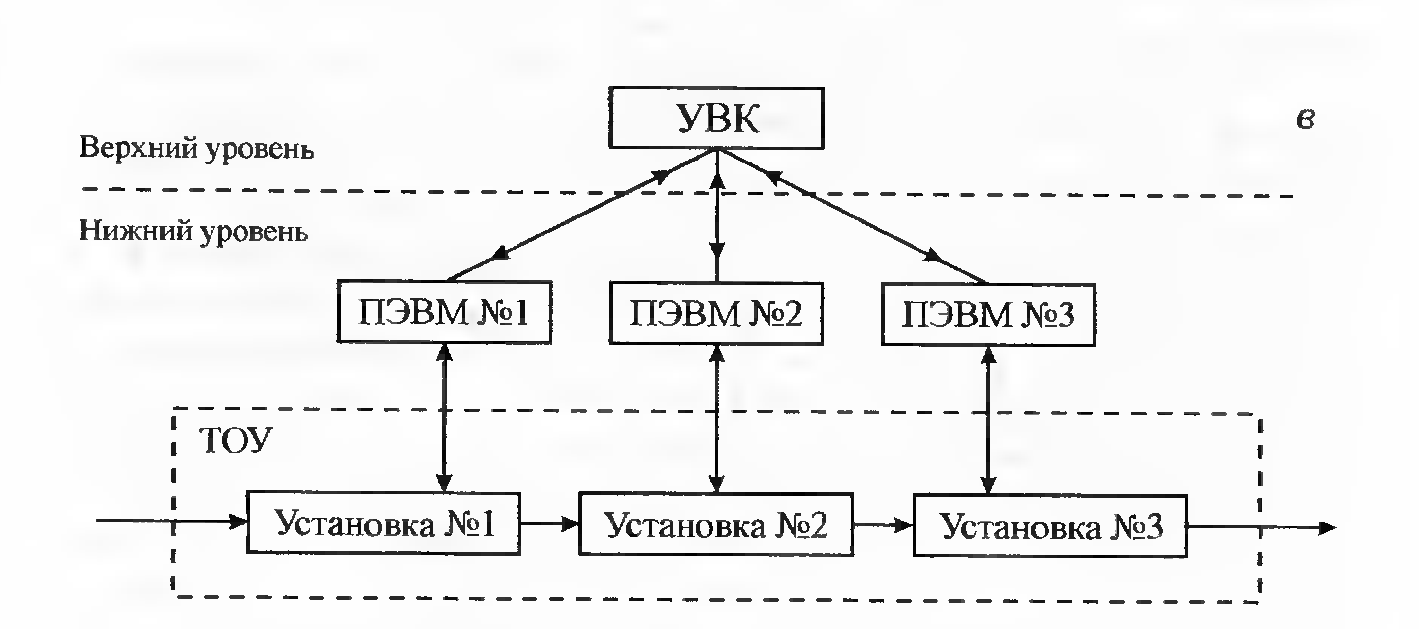
6) Распределенные АСУ ТП
Функции АСУ ТП могут быть выполнены несколькими взаимосвязанными процессорами, объединенными в вычислительную сеть, что позволяет сократить потоки информации к центральному ВК и повысить надежность АСУ ТП.
Различают функциональное и территориальное разделение распределенной системы управления.
Функционально-децентрализованное – 3 процессора, каждый из которых выполняет 3 функции: информационную, управляющую, вспомогательную.
Территориальная децентрализация – каждая ЭВМ выполняет все функции, но они распределены по разным участкам.
56. Переваги та недоліки розподілених АСКТП
Реализация распределенной структуры стала возможной в связи с появлением новых технических средств автоматизации - микропроцессорных контроллеров (РЕМИКОНТ, ЛОМИКОНТ, программно-технического комплекса УНИКОНТ и других).Она базируется на трех основных принципах:-Задачи управления сложным объектом разделяются между несколькими (или несколькими десятками) микропроцессорных контроллеров и УОК, каждый из которых обслуживает сравнительно автономную зону технологического процесса;-Представление информации иерархически централизуется (по агрегату, цеха, под-предприятию) информация представляется преимущественно на экранах дисплеев в компактной, наглядной форме без использования громоздких щитов для размещения приборов контроля и автоматизации;-Для связи технических средств между собой используется цифровая сеть,информация в которой передается в последовательной форме (ИРПС). Распределены АСУТП работают преимущественно в режиме супервизорного или прямого цифрового управления. При супервизорному режиме работы УОК включается в замкнутый контур автоматического управления и вырабатывает управляющие воздействия в виде сигналовзадачи локальным регуляторам. Оператор осуществляет лишь общий надзорза ходом процесса. Вмешательства в управление нужно только в случае возникновениянепредвиденных ситуаций. Остается также необходимость вносить коррективыв управление процессом при изменениях условий производства (сырья, продукции чтопроизводится и проч.), то есть уточнять математические модели процесса, их коэффициенты. В режиме прямого цифрового управления локальные регуляторы вообще исключаются из системы или используются как резерв. Их роль выполняет непосредственно УОК, т.е. на вычислительный комплекс возлагаются дополнительные функции по формированию законов регулирования и управления исполнительными механизмами АСУТП. Очевидный недостаток концепции ПЦУ проявляется при отказах УОК-полная потеря управления объектом.
57. Дайте визначення:ТСП, ТХА
Термопа́ра (термоэлектрический преобразователь температуры) — термоэлемент, применяемый в измерительных и преобразовательных устройствах, а также в системах автоматизации.
Термопары широко применяют для измерения температуры различных объектов, а также в автоматизированных системах управления и контроля. Измерение температур с помощью термопар получило широкое распространение из-за надежной конструкции датчика, возможности работать в широком диапазоне температур и дешевизны. Широкому применению термопары обязаны в первую очередь своей простоте, удобству монтажа, возможности измерения локальной температуры. Они гораздо более линейны, чем многие другие датчики, а их нелинейность на сегодняшний день хорошо изучена и описана в специальной литературе. К числу достоинств термопар относятся также малая инерционность, возможность измерения малых разностей температур. Термопары незаменимы при измерении высоких температур (вплоть до 2200°С) в агрессивных средах. Термопары могут обеспечивать высокую точность измерения температуры на уровне ±0,01°С. Они вырабатывают на выходе термоЭДС в диапазоне от микровольт до милливольт, однако требуют стабильного усиления для последующей обработки.
ТХА – термопара хромель-алюмелевая — ТХА — Тип K
ТХА Обладают: — наиболее близкой к прямой характеристикой. Предназначены для работы в окислительных и инертных середах.
Коэффициент термоЭДС, мкв/°С (в диапазоне температур, °С) - 35-42 (0-1300).
Диапазон рабочих температур, °С - от -200 до +1200.
Предельная температура при кратковременном применении, °С – 1300.
ТХК хромель-константановые Обладают: — наибольшей чувствительностью;
— высокой термоэлектрической стабильностью при температурах до 600°С.
Предназначены для работы в окислительных и инертных средах.
Недостаток: высокая чувствительность к деформациям
ТПП платинородий-платиновые Обладают: — хорошей устойчивостью к газовой коррозии, особенно на воздухе при высоких температурах;
— высокой надежностью при работе в вакууме (но менее стабильны в нейтральных средах).
Предназначены для длительной эксплуатации в окислительных средах.
Недостаток: высокая чувствительность термоэлектродов к любым загрязнениям, появившимся при изготовлении, монтаже или эксплуатации термопар
58. Елементи порівняння, переваги і недоліки
Элементы сравнения—элементы, сравнивающие значения двух (или нескольких) сигналов. Выходной сигнал этих элементов равен разности поступающих на их вход сигналов.
В САР регулируемая величина сравнивается с задающей величиной в суммирующем устройстве. Зачернённый сектор в графическом изображении суммирующего устройства означает, что входящие в этот сектор воздействие подаётся с обратным знаком. Благодаря этому при значении регулируемой величины, равном заданному, на вход усилителя системы сигнала не поступает и система находится в равновесии. В случае неравенства значения сигнала заданному рассогласование (ошибка) подаётся на вход усилителя системы, которая реагирует на это таким образом, чтобы рассогласование уменьшилось.
По своему назначению элементы сравнения являются аналого-дискретными; однако по принципу действия эти элементы относятся к аналоговым усилителям с большим коэффициентом усиления: их выходной сигнал может принимать не только предельные, но и любые промежуточные значения. Элементы сравнения реализуют также аналоговые операции алгебраического суммирования, повторения, удвоения и т. п., обладают достаточно хорошей статической точностью и быстродействием.
59. Дайте визначення та охарактеризуйте децентралізовану структурау АСКТП.
Децентрализованная структура
Децентрализация технической структурытуры АСУ ТП является принципиальным методом повышения надежности и живучести этихсистем, снижение стоимости разработки и эксплуатационных расходов. Наиболее перспек-ными направлениями децентрализации АСУ ТП являются: функционально-целевой итопологический. Функционально-целевое направление децентрализации объекта управления - это распределение сложного технологического процесса на меньшие части -подпроцессы по функциональному признаку, имеющих самостоятельные целифункционирования. Топологический направление децентрализации объекта управленияпредусматривает возможность территориального (пространственного) распределения технологическогопроцесса на функционально-целевые подпроцессы. При этом число подсистем надовыбирать так, чтобы минимизировать суммарную длину линий связи, образующихтехническую структуру. Построение системы с такой структурой эффективно при автоматизации технологически независимых объектов управления по материальным, энергетическим, информационным и другим ресурсам. Такая система представляет собой совокупность нескольких независимых систем со своей информационной и алгоритмической базой.
Для выработки управляющего воздействия на каждый объект управления необходима информация о состоянии только этого объекта.
60. Дайте визначення: НСХ, Ремиконт
Стандартная зависимость НСХ (номинальная статическая характеристика) от температуры определяется экспериментально по результатам измерений в эталонной лаборатории, полученным для большого количества термопар. При переходе на новую международную шкалу зависимость должна быть пересмотрена. В 1992 г. после принятия шкалы МТШ-90 под руководством института НИСТ (National institute of standards and technology)(США), была проведена большая международная работа по определению функции ТЭДС-температура для эталонных термопар типа S, соответствующей новой международной температурной шкале. Работа проводилась в виде сличений термопар и эталонных высокотемпературных платиновых термометров сопротивления. Результаты, представленные разными странами, анализировались и обобщались. Итогом работы стала новая стандартная функция, принятая в настоящее время в международных и национальных стандартах.
Контроллер - это прибор, который регулирует работу оборудования. Он получает от всех остальных устройств сигналы, которые вызывают ответную реакцию: включение или выключение тех или иных функций, изменение параметров, обработка и сохранение информации. В настоящее время контроллеры имеют возможность обработки и аналоговых, и цифровых сигналов. Кроме возможности программирования, они получили и память для хранения информации.
Среди отечественных контроллеров самое большое распространение получил прибор под именем Ремиконт
Он давно и успешно применяется на предприятиях нефтехимической, энергетической, металлургической, пищевой промышленности и многих других отраслях индустрии. Этот контроллер отличается от своих зарубежных аналогов более доступной стоимостью и надежностью при эксплуатации. Он прекрасно подходит и для работы с традиционным оборудованием, и для управления самыми новыми технологическими процессами. Имеются различные модификации Ремиконта, носящие маркировку из нескольких цифр и букв, например, повсеместно встречающийся Ремиконт-130.
Основные функции контроллера Ремиконт - построение систем управления автоматическим оборудованием и управление такими системами в действии. Контроллер осуществляет регулирование систем, регистрацию данных, полученных от приборов, защиту всей системы от аварийной ситуации и блокировку приборов в случаях, когда это необходимо.