

1 Основные понятия и определения
УУ-устройство управления
ОУ-объект управления
СУ-система управления
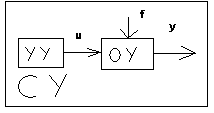
Любая система автоматизации состоит из УУ и ОУ.
Автоматизация-управление процессом с участием человека.
Автоматика-управление процессом без участия человека.
На любой ОУ действуют вх воздействия:
u-управл сигнал.
f-возмущающее воздействие
Состояние системы характ-ся выходным воздействием.
В системе м/б несколько вх и вых воздействий.
2 Принципы управления
Работа САУ происходит по одному из 3х осн принципов:
1)разомкнутое управление-данное управление ведется по заранее рассчитанной программе независимо от возмущ воздействия

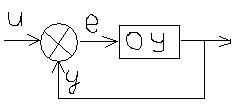
2)управление по обратной связи (управление по ошибке)
Сущ-ет 2 вида обратной связи: положительная и отрицательная.
Сигнал упр формируется по ошибке e=u-y, т.е. происх сравнение состояния объекта с необходимым состоянием.
3)управление по возмущению-сигнал формируется в зависимости от возмущающего воздействия.
В данном случае сигнал формируется в зависимости от измеренного возмущ воздействия.
3 Классификация систем управления
По принципу управления (регулирования):
-разомкнутые;
-замкнутые;
-комбинированные.
По цели управления:
-системы стабилизации;
-системы программного управления;
-следящие системы;
-адаптивные (самонастраивающиеся) системы.
По количеству регулируемых величин:
-одномерные;
-многомерные.
По характеру сигналов в регуляторе (устройстве управления):
-непрерывные (аналоговые);
-с гармоническим модулированным сигналом;
-дискретные (релейные, импульсные, цифровые).
По характеру параметров:
-стационарные;
-нестационарные;
-с распределенными параметрами.
По идеализации математического описания:
-линейные;
-нелинейные.
В следящих системах упр сигнал формируется в зависимости от состояния системы.
Статические системы:
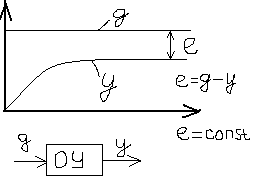
В статич системах в установивш сост присутствует постоянная ошибка e-разница м/у вх и вых сигналом.
Астатические системы:
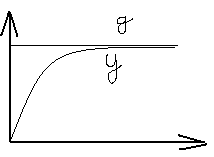
В установивш режиме разница м/у вх и вых сигналом равна нулю.
4 Математическое описание. Уравнения статики и динамики. Линеаризация.
Любой процесс или объект можно описать дифф или разностными уравнениями. Ур-е динамики описывает процессы в системе при произвольных вх воздействиях в течение времени. Ур-е статики описывает процессы в системе при постоянных вх воздействиях в установивш режиме. В основном системы описыв нелинейн дифф ур-ями, что затрудняет исследование системы и объекта.
Замена нелинейного ур-я линейным нзв линеаризацией.
Общий вид линейной системы автоматического управления

В реальных условиях большинство элементов автоматической системы являются не линейными.
5 Математическое описание. Преобразование Лапласа. Передаточная функция.
Анализ и синтез САУ существенно упрощается при использовании прикладных математических методов операционного исчисления.
Имеется функция вещественной переменной f(t), ей можно поставить в соответствие F(p), где f(t) – оригинал, F(p) – изображение.
![]() -интеграл
Лапласа
-интеграл
Лапласа
![]()
![]()
![]() –
комплексная
переменная;
–
комплексная
переменная;
Преобразование Лапласа обладает следующими свойствами: операциям дифференцирования и интегрирования в приведении вещественной переменной соответствуют эквивалентные алгебраические операции умножения и деления с использованием комплексной переменной.
Применение преобразования Лапласа позволяет перейти от исходных дифференциальных уравнений к эквивалентным алгебраическим уравнениям в представительстве комплексной переменной.
Передаточной функция звена или системы – отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.
![]()
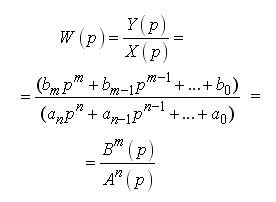 –
передаточная
функция.
–
передаточная
функция.